




 广告
广告





















































多电机分布式驱动汽车底盘集成控制技术

1.1分散式控制架构
传统车辆底盘控制大多数采用分散式控制架构,各子控制系统根据控制功能单独配备传感器采集车辆状态数据,子系统控制器根据各自的控制目标输出控制指令给子系统执行器。分散式架构有利于系统模块化、便于控制功能扩展与更新,当需要引入新的底盘控制系统时不需要大范围的重新设计,也不需要额外的高级控制器。因此底盘控制系统数量不多、集成程度要求低的情况下分散式控制架构是良好选择,通过车辆信息共享能够实现一定程度的集成效果。作为集成控制的初步尝试,分散式架构早期也引起汽车企业的应用兴趣。德国博世公司采用集成安全理念,将底盘多个控制子系统组合成车辆动力学管理(VDM)系统,实现了车辆动力学分层管理,避免了各子系统之间的冲突,通过协同作用最大限度地提高汽车安全性。
分散式架构属于低等级的集成架构,可以实现简单集成控制。但由于在极限工况下,转向和制动系统耦合度高,分散式架构没有实现真正的纵、侧向动力学解耦,无法减少系统控制功能的冲突。对于悬架系统,由于其主要控制车辆的垂向运动,提高车载人员的乘坐舒适性,与其他底盘电控系统没有直接冲突,因此分散式集成架构适合悬架系统与转向系统、制动系统等集成控制。
1.2集中式控制架构
集中式控制系统根据控制需求,采用不同类型的传感器和观测器收集车辆信息至集中控制器中,实现车辆信息共享,避免硬件设备重复安装;控制器通过设计全局协调控制策略或全局优化算法,直接将各子系统的执行信号输出给所有子系统执行器,其结构如图2所示。
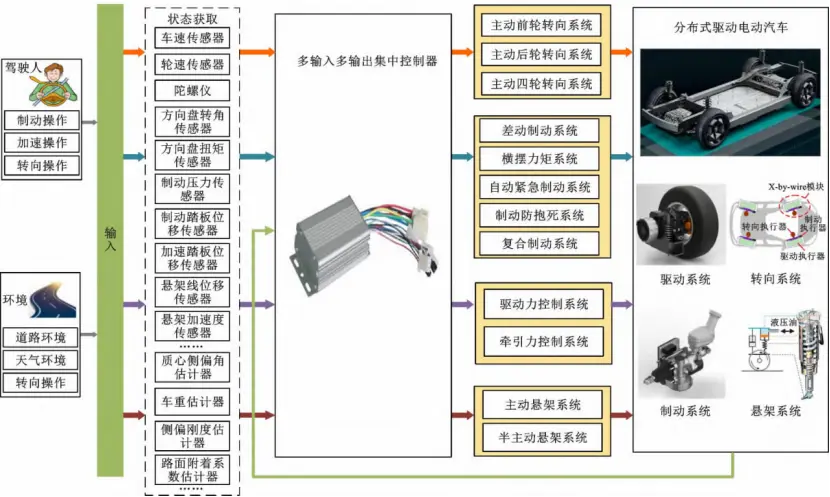
图2 集中式控制架构
集中式控制架构在设计初期需要确定全局控制目标,理论上能够实现控制性能全局最优,因此不少企业初期尝试采用此种控制架构实现底盘全局控制。但是,由于集中式控制架构集成度较高,目前集中式控制架构并没有得到广泛应用,主要原因体现在:①各控制系统缺乏相对独立性,集成开发工作需与电控系统供应商协作;②高度精确的系统控制模型是进行集中式控制的基础,由于系统控制模型和控制器的阶数较高,需要大量的建模、仿真、测试与标定工作;③全局集成控制后,大量的数据计算对ECU性能提出更高要求;④后期功能扩展困难,系统可扩展性和灵活性较差;⑤集中控制器需要设计容错机制,可靠性仍有待提升。
1.3分层式控制架构
考虑到控制效果、集成难度及硬件设备条件的限制,目前底盘集成控制广泛采用介于分散式架构和集中式架构之间的分层式集成控制架构,其结构如图3所示。分层式控制架构一般可分为3层:顶层为状态输入层、中间层为协调决策层、底层为控制执行层。状态输入层获取驾驶人或自动驾驶命令,根据驾驶人操作获取驾驶人操作意图,计算全局控制输入并对当前的驾驶情况进行定义分类。协调决策层根据顶层控制器定义的工作模式选择不同的协调控制策略,并将不同控制输入分配到各个底盘子系统。控制执行层包括底盘各子系统控制器,其功能是实现跟踪中间层的控制命令,将子系统控制信号传递到执行器硬件。
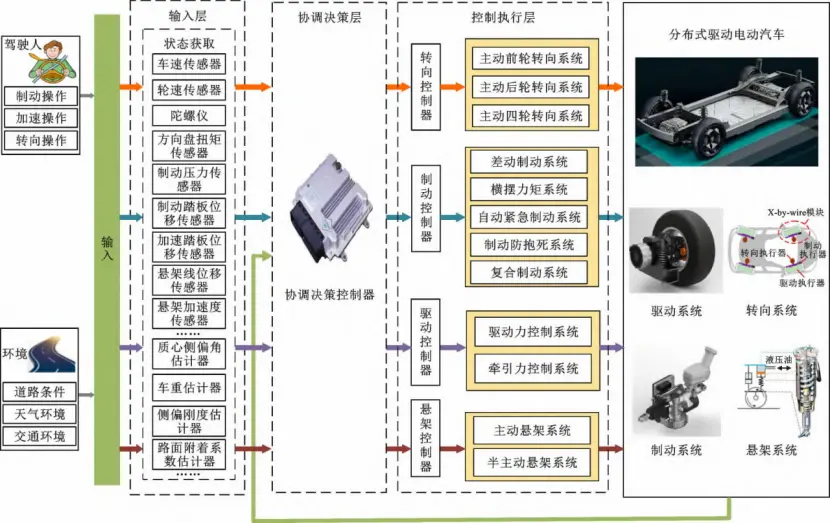
图3 分层式控制架构
分层式控制架构兼顾了分散式和集中式架构的优点,基于分层式控制架构设计的分布式驱动电动汽车底盘集成控制系统结构清晰,各级间相互独立功能解耦,便于系统的开发和功能拓展,对系统局部故障也具有良好的鲁棒性和一定程度的容错能力。分层式架构还允许企业与供应商独立开发相应的控制器,通过标准化接口实现控制功能叠加。近年来,分层式控制架构得到不少企业的青睐。
从上述3类控制架构的特点可以看出,随着电控化、智能化水平的不断提升及飞速发展,基于分层式控制架构的集成控制器在传统集中式驱动电动汽车中得到广泛应用。而分布式驱动电动汽车集成控制器中必然包含更多的子控制器,集成的难度和复杂度不断增加,并且系统扩展与更新频率将更高,各子控制器在控制区域、执行器方面也必然出现重叠甚至矛盾,分散式、集中式控制架构下的集成控制器性能将受到极大限制。因此,分层式控制架构更利于分布式驱动电动汽车底盘集成控制的进一步发展,将会成为未来底盘集成控制技术研究的主流。
2.分布式驱动汽车底盘集成控制策略
2.1纵-横向动力学集成控制
车辆的纵向、侧向、横摆运动间互相影响,纵-横向动力学表现出明显的耦合关系。纵-横向集成控制系统通过改变轮胎的纵向力、侧向力可以直接影响车辆的纵向、横向及横摆运动。分布式驱动电动汽车纵向动力学控制能够对每个车轮单独施加纵向驱动力矩或制动力矩,其工作区域基本不受轮胎纵向力饱和的限制。因此通过纵-横向动力学集成控制,可以在减小控制功能冗余与动力学冲突的情况下进一步提高车辆的操纵稳定性。纵-横向动力学集成控制中,车辆纵向动力学性能的控制一般可选择差动制动系统、电液复合制动系统、制动防抱死系统(ABS)、牵引力控制系统(TCS),横向动力学控制可选择主动前轮/后轮/四轮转向系统(AFS/ARS/AWS)、直接横摆力矩控制系统(DYC)。
目前针对分布式驱动汽车纵-横向动力学集成控制往往采用与集中式驱动相同的思路,其重点在于通过设计不同工况的优化目标函数、考虑子系统有效工作区域及轮胎力等因素,采取分层式集成控制架构,设计适当的控制策略。常见的转向系统与DYC集成控制系统结构如图4所示。上层控制器根据获取的车辆状态信息及驾驶人意图,基于车辆二自由度参考模型计算期望横摆角速度和质心侧偏角,将车辆实际横摆角速度和质心侧偏角作为状态量反馈决策附加横摆力矩。根据不同的协调控制策略,输出子控制系统的控制分配权重。底层控制系统根据各自的控制目标跟踪控制参考值。
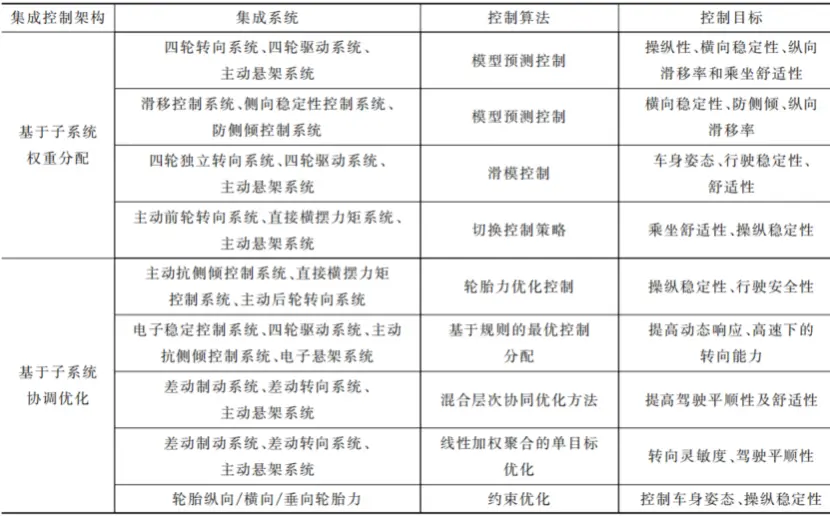
图4 转向系统与驱动/制动系统集成控制



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
