




 广告
广告





















































多电机分布式驱动汽车底盘集成控制技术

表1 纵-横向动力学集成控制方案
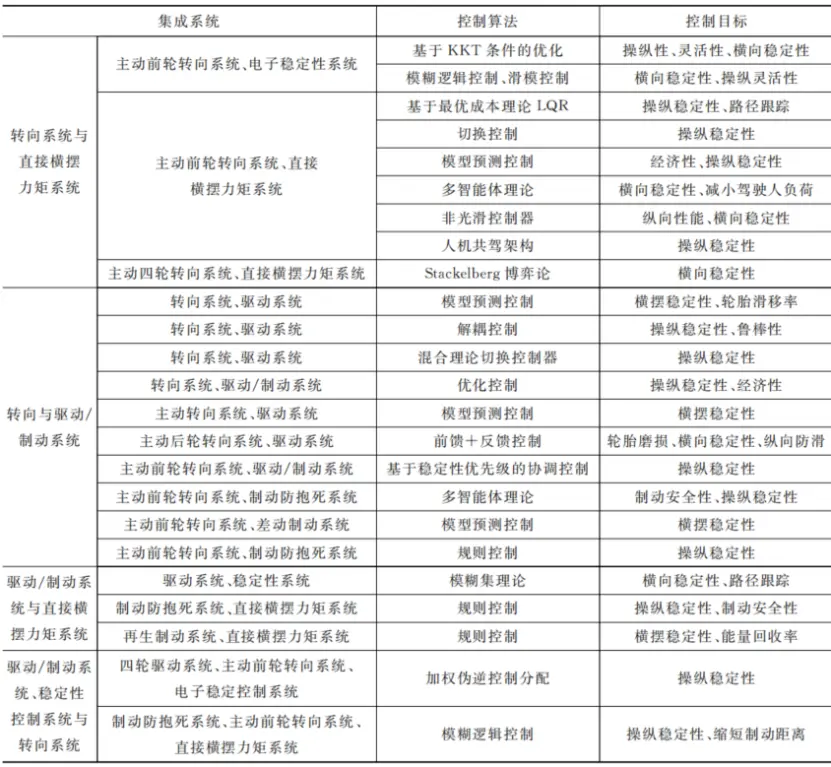
2.2 横-垂向动力学集成控制
除了侧滑和激转,侧翻也是常见的车辆侧向失稳形式。驾驶人操作转向系统产生横摆运动,悬架系统影响侧倾运动,车辆侧倾运动与横摆运动间存在较强的耦合关系,继而影响车辆横向载荷转移率。同时,侧向加速度引起的车辆垂直载荷变化传递到轮胎上,将加重轮胎力的非线性特性进而影响车辆行驶稳定性。因此,车辆紧急转向或高速变道时,较大的侧向加速度和较大的载荷转移可能会导致侧翻危险的发生。
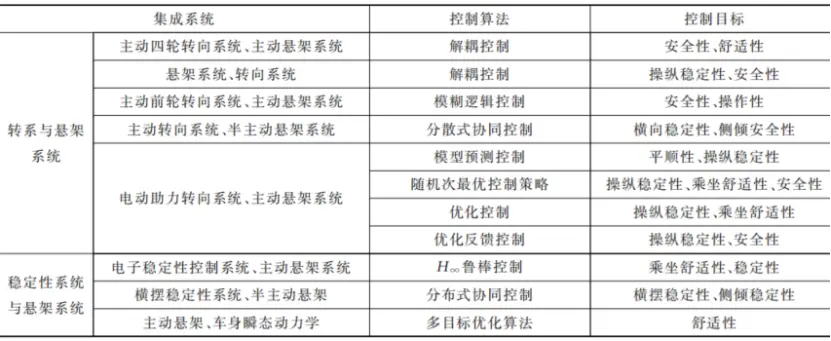
表2列出了目前研究中常用的横向动力学控制系统与悬架系统协调控制方案。针对横-垂向动力学集成控制,希望通过悬架系统改变各车轮的垂直载荷,以改善轮胎与路面的附着条件,进而改善车辆的横向动力学性能。目前主要采用分散式或分层式集成控制架构进行转向系统与悬架系统集成控制,不仅实现了轮胎与路面的接触条件实时优化,有效防止了汽车侧翻的发生,对车辆横摆稳定性、平顺性和行驶安全性均有所提高。对于分布式驱动电动汽车,由于电机安装在轮辋中,使得非簧载质量显著增加,垂向运动特性发生明显改变,因此需要针对其垂向动力学的新特性进行横-垂向动力学集成控制研究。
表2 横-垂向动力学集成控制方案
2.3 纵-垂向动力学集成控制
当车辆进行制动时,路面能够提供给轮胎的最大制动力受路面附着系数以及轮胎垂向力的影响。主动悬架系统通过与制动防抱死系统集成,间接调节轮胎的法向反力,可以实现最大的制动效能。在不失去对车辆控制的情况下,制动距离尽可能短是车辆最重要的安全要求,目前的应用中最引人注目的是制动防抱死系统。因此,纵-垂向动力学集成控制将有利于提升车辆紧急情况下的驾驶安全性。
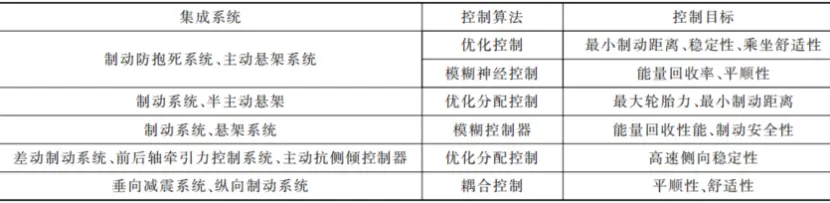
表3列出了常用的控制方案。通过纵-垂向动力学集成控制,轮胎与路面的附着条件得到改善,制动时间和制动距离进一步降低,部分控制系统使得车辆高速转弯时的侧向稳定性、对外部扰动的鲁棒性也有所提升。通过悬架系统与复合制动的集成,还可以改善能量回收效率,进一步提高经济性。相比于集中式驱动,目前驱动/制动系统与悬架系统集成控制研究主要集中在ABS与主动悬架的集成控制方面,同时还需要兼顾车辆运行平顺性与舒适性。
表3 纵-垂向动力学集成控制方案
2.4 纵-横-垂向动力学集成控制
由于分布式驱动汽车在车辆动力学控制中可控自由度高的优势,近年来,纵-横向动力学集成控制、横-垂向动力学集成控制、纵-垂向动力学集成控制逐渐发展为纵-横-垂向动力学集成控制。通过解耦子系统间的动力学耦合关系、合理分配轮胎力,改善车辆动力学性能并减轻驾驶强度,获得不同行驶工况下底盘纵、横及垂向动力学全局最优的控制响应。对于纵-横-垂向动力学集成控制,由于系统间耦合复杂度成倍增加,因此从控制系统的效果、实时性、控制精度等角度考虑,主要提出了2类控制方法:①基于权重分配的协调控制;②基于优化的协调控制,其协调控制架构如图5所示。
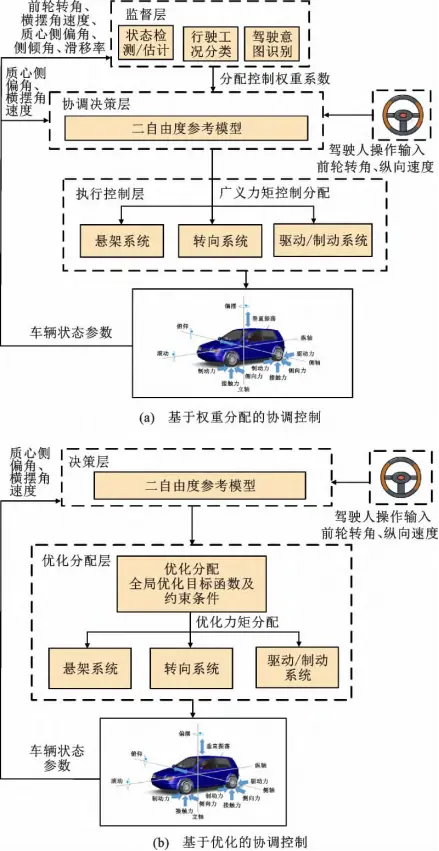
图5 驱动/制动系统、转向系统和悬架系统分层集成控制



编辑推荐




最新资讯
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
-
天检新能力VOL.95 | 乘员晕车仿生测试能力
2025-04-25 10:14
