




 广告
广告





















































多电机分布式驱动汽车底盘集成控制技术

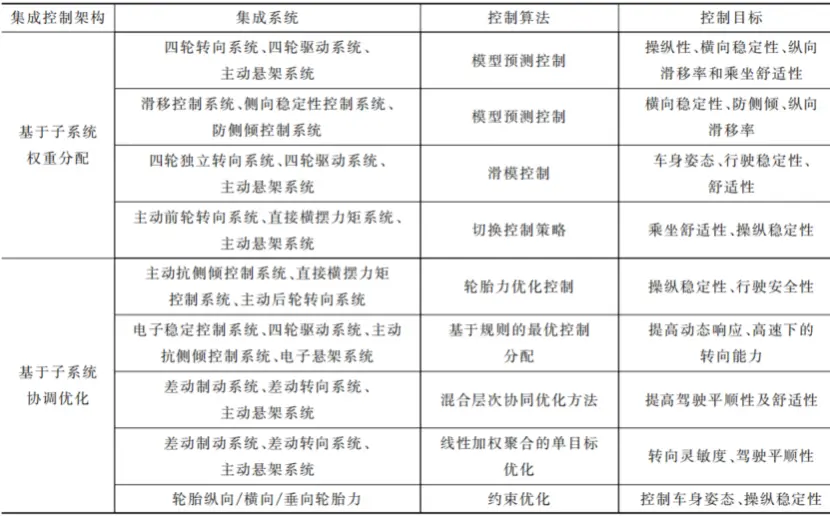
表4 纵-横-垂向动力学集成控制方案
2.5 分布式驱动汽车运行状态划分
由于分布式驱动电动汽车底盘子控制系统的工作特性的限制,在不同的控制目标下各系统工作的区域各有不同,车辆运行状态划分对于控制效果也有显著影响。因此在集成控制中,需要针对车辆不同运行状态制定相应的控制策略。目前车辆运行状态划分研究方法包括:车辆相平面分类法、车辆轮胎力分析法等。
相平面法也是近年来普遍采用的车辆行驶状态划分方法。相平面法是在三参数变化的情况下判断系统是否稳定的重要方法,一般包括:质心侧偏角-横摆角速度(β-ω)相平面、质心侧偏角-质心侧偏角速度 相平面、前后轮侧偏角相平面。相平面通过稳定平衡点和非稳定平衡点可以分为稳定区域、临界区域、非稳定区域。目前,相平面的区域边界主要确定方法为双线法。双线法稳定域的边界一般用通过两鞍点做切线表示,稳定边界数学模型为
相平面、前后轮侧偏角相平面。相平面通过稳定平衡点和非稳定平衡点可以分为稳定区域、临界区域、非稳定区域。目前,相平面的区域边界主要确定方法为双线法。双线法稳定域的边界一般用通过两鞍点做切线表示,稳定边界数学模型为
平行线法参数较少、表示较为简单,能适用于较大多数情况下的相平面图的分析。但是对于分析稳定极限来说,车辆常处于临界稳定状态,此时的相平面轨迹线收敛区域明显变窄且变化非常剧烈,相轨迹线已较难收敛到稳定结点,而且两侧临界边界已经明显不对称,平行线法已经难以适用。
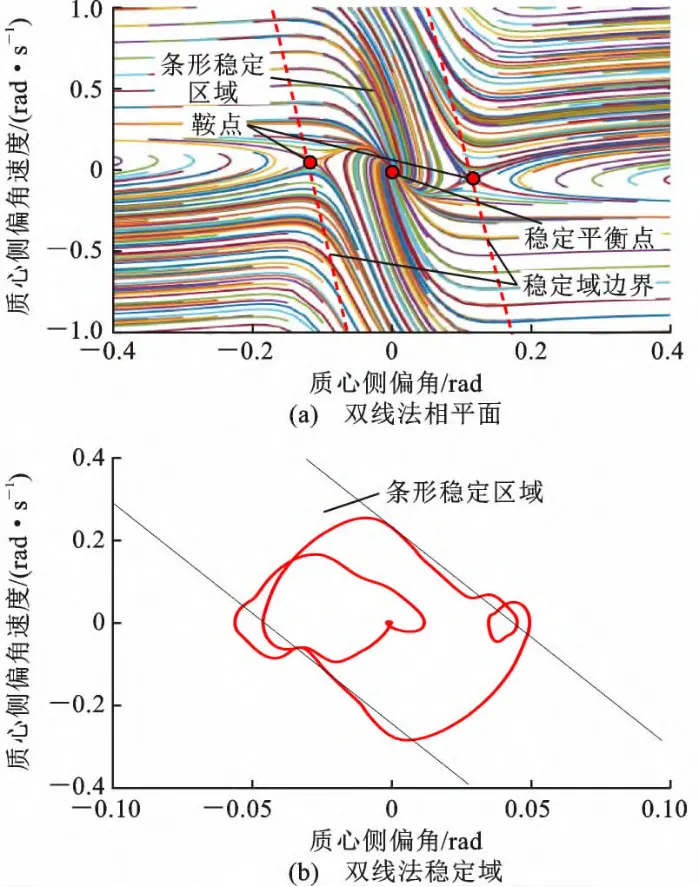
图6 双线法相平面和稳定域
考虑到底盘控制最终需要通过改变轮胎力来实现,而轮胎力具有强非线性及饱和性特征,因此根据轮胎力特点对车辆运行状态划分,并设计协调控制系统可以获得车辆理想的控制效果。比如基于分层控制架构的AFS和DYC协调控制系统,考虑路面附着条件和轮胎垂向载荷对轮胎侧向力的影响,根据轮胎力确定2个子系统的工作区域。在轮胎线性区,仅AFS参与控制;在轮胎侧向力饱和区,仅DYC参与控制;在过渡工作区域,由于轮胎侧向力呈非线性增加,但未达到饱和状态,采用AFS和DYC协同工作,基于轮胎侧偏角定义了过渡区域的协调权重因子。



编辑推荐




最新资讯
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
-
天检新能力VOL.95 | 乘员晕车仿生测试能力
2025-04-25 10:14
