




 广告
广告





















































多电机分布式驱动汽车底盘集成控制技术

3.1容错控制
由于分布式驱动电动汽车是一个典型的过驱动系统,系统复杂性高、耦合性强、执行器与传感器数量多,因此各子系统发生失效的概率也大幅增加。且由于各子系统的复杂耦合关联关系,失效后引起的整车动力学响应也更加复杂。为了保证分布式驱动电动汽车在传感器失效、驱动系统、底盘执行机构发生故障时仍能具备安全行驶能力,分布式驱动汽车容错控制方法可以分为两类:被动容错和主动容错。
被动容错控制在不改变控制器和系统结构的条件下,通过对可能发生的故障进行分类概括,只需预先制定逻辑规则,使得其对外界扰动或特定故障具有鲁棒性,达到故障容错的目的。目前的被动容错控制技术研究主要集中在可靠镇定、完整性控制以及联立镇定3个方面,具有结构设计简单、易于实现的优点,但是其控制范围有限,不能通过鲁棒控制解决所有故障类型。对于控制维数较高、故障源更多的分布式驱动电动汽车,被动容错控制策略显得过于保守,控制性能难以达到最优。主动容错控制根据获取的精确故障信息,在不同的故障模式下实时调节控制器参数或重构控制器结构,主动补偿或削弱故障的影响,提高故障下系统的性能要求。
目前分布式驱动电动汽车的容错控制多以动力性和稳定性为控制目标,对存在传感器失效、驱动及底盘执行系统失效的分布式驱动电动汽车进行容错控制。如何对故障位置及故障模式进行精确判断是进行主动容错控制的基础。同时,现有研究主要考虑单一执行器失效的情况,缺乏多种失效耦合作用机理及底盘容错控制研究。未来针对多机构执行器故障容错集成控制的研究将确保车辆多维度的行驶安全性。
3.2底盘域控制器
域控制器(DCU)的概念最早是以博世、大陆为首的控制系统级供应商提出,以解决信息安全、控制单元数量较多带来的计算负荷大的问题。域控制器将整车电控系统按照功能划分为动力域(安全)、底盘域(操纵)、信息娱乐域(座舱域)、自动驾驶域(高级辅助驾驶域)和车身域(车身电子)五大区域,每个区域设计相互独立功能和控制目标的域控制器,最后通过CAN总线或其他通信方式与控制主线连接,实现整车的信号通信,然后利用计算能力强大的多核芯片处理相对集中的控制域内原本归属各个ECU的大部分功能。通过域控制器的整合,最大的优势是将分散的车辆硬件之间实现信息互联互通和资源共享,大幅改善数据处理效率继而提升车辆的智能化水平。
清华大学李亮等提出了面向智能汽车的底盘动力学域控制概念和底盘动力学域控制架构,如图7所示。该控制架构首先进行底盘多传感器的信号融合,通过对车辆系统以及行驶环境的关键状态参数进行估计,在此基础上进行整车多自由度动力学状态演算;通过车辆动力学运行状态对驾驶人行驶操纵意图进行精准识别,根据驾驶意图的识别结果,进行底盘多目标多系统的综合优化以及各个部件的协调控制。
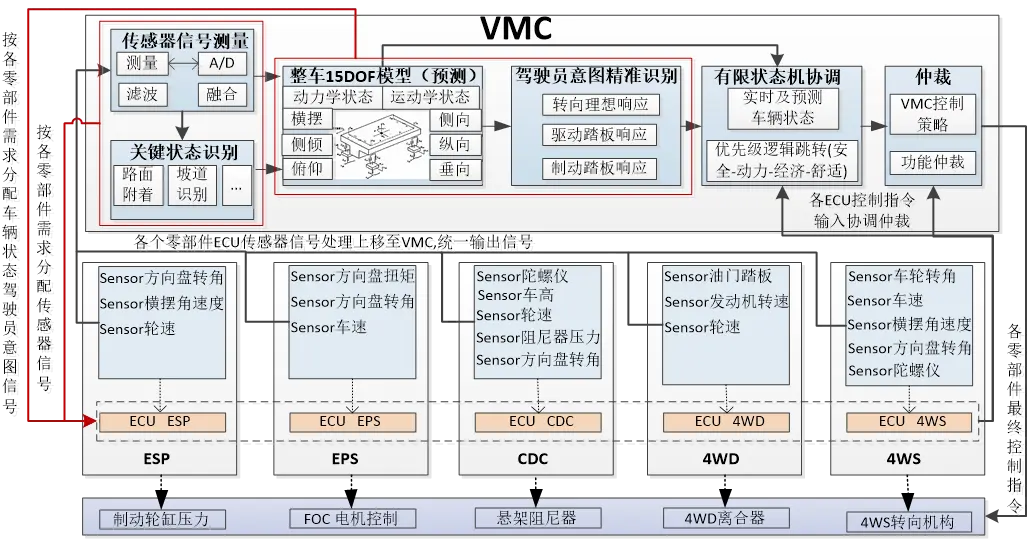
图7 面向智能汽车的底盘动力学域控制架构
目前分布式驱动汽车上还未见基于域控制架构的底盘控制器产品,相关研究也较少,为了实现未来车辆智能化与网联化的发展,高度集中式的电子电气架构将成为分布式驱动汽车控制系统解决方案,域控制器作为整车集成度最高的集成平台。



编辑推荐




最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
