




 广告
广告





















































多电机分布式驱动汽车底盘集成控制技术
2024-09-13 12:05:30· 来源:智能运载装备研究所 作者:赵轩等

多电机分布式驱动汽车的各电机独立可控,可以实现各车轮扭矩的独立精确控制;电机扭矩测量、车辆的状态量观测与辨识更易实施;并且电机既可以产生制动力也可以产生驱动力,使得底盘控制系统适应区域更大,为车辆动力学控制创造了理想条件。
在目前的车辆电子电气架构下,各控制系统由其对应的电控单元(ECU)控制,因此,在分布式驱动汽车装配多种控制系统后,将不可避免出现各控制系统目标不一致、执行系统干涉等问题,底盘集成控制成为解决此问题的有效手段。
底盘集成控制可消除子系统间冲突、补偿单子系统的局限性、降低系统复杂度、扩展整车安全运行区域,最终实现多控制目标下整车动力学协调。目前针对分布式驱动汽车底盘集成控制技术的研究主要包括:车辆纵-横向动力学集成控制、车辆横-垂向动力学集成控制、车辆纵-垂向动力学集成控制、车辆纵-横-垂向动力学集成控制。近年来,国内外整车厂商及零部件供应商也在围绕这一重点、难点技术进行攻关,例如采埃孚公司开发了车辆底盘集成协调控制器VMC cubiX,如下图所示。
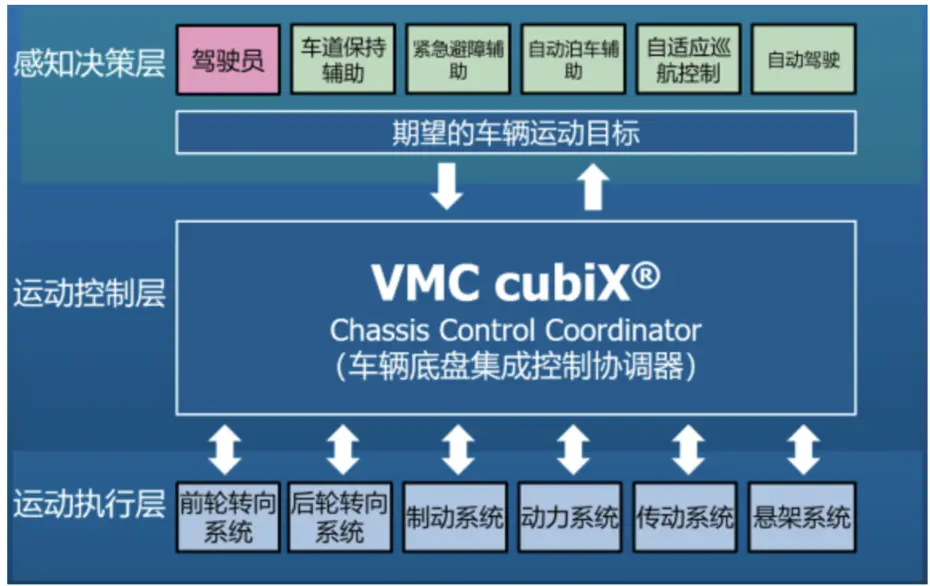
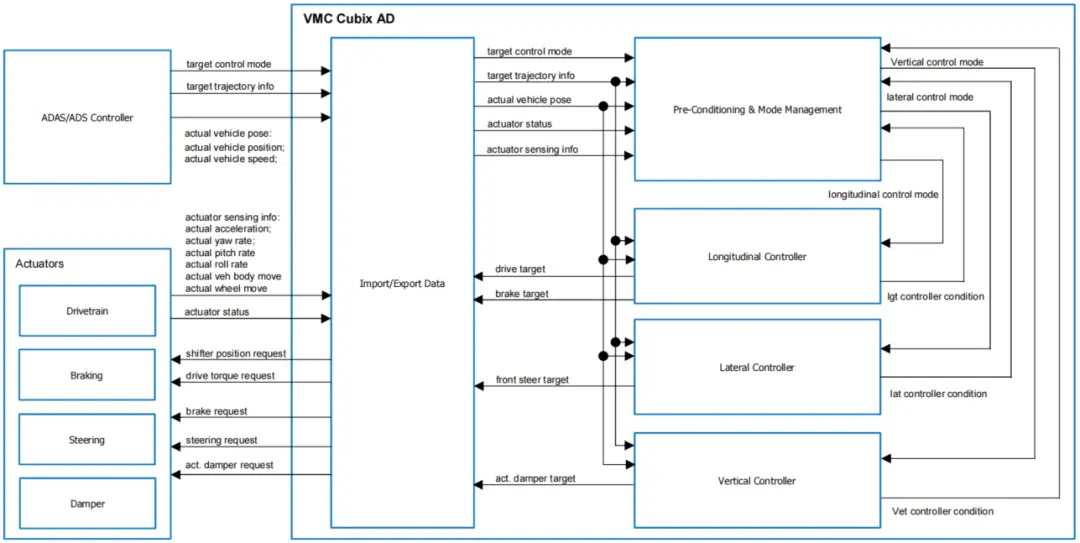
图1 采埃孚VMC cubiX



编辑推荐




最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
