




 广告
广告





















































DAISCH IM8 面向汽车智能驾驶应用的运动感知解决方案

9月12日,全球三大传感器专业展览会之一的SENSOR CHINA 2024于上海火热举办。在这个展示前沿技术及智慧未来的宏大舞台上,戴世联合创始人兼CEO卞江受邀在自动驾驶传感器技术与应用专题论坛中,进行了《面向汽车智能驾驶和动态测试应用的运动感知解决方案》主题演讲。接下来让我们带着三个问题,一同回顾卞总的精彩演讲:
-
IMU为何成为智驾进阶过程中不可缺少的传感器?
-
从低阶智驾到高阶智驾,对IMU提出了哪些进阶挑战?
-
针对高阶智驾,戴世IM8如何给出一份“完美答卷”?
PART.01
IMU成为智能驾驶中的关键传感器
传统车上的运动感知部件有轮速传感器、横摆角速度传感器、碰撞传感器、悬架加速度传感器、悬架位移传感器、卫星定位等等。
伴随智能驾驶的兴起,摄像头、激光雷达,高精度6轴IMU等传感器在外界环境及车辆自身感知过程中开始发挥重要作用。
其中高精度IMU是唯一一个不向外发生信号,也不接收外界信号的可以自主工作的传感器。
近年来,随着低阶经典智驾迈向高阶端到端智驾,汽车智能驾驶运动感知方案也由GNSS模组、PBOX、进阶为集成在域控中的独立IMU模组,可以看出IMU在未来智驾场景中将承担更为重要的感知角色。

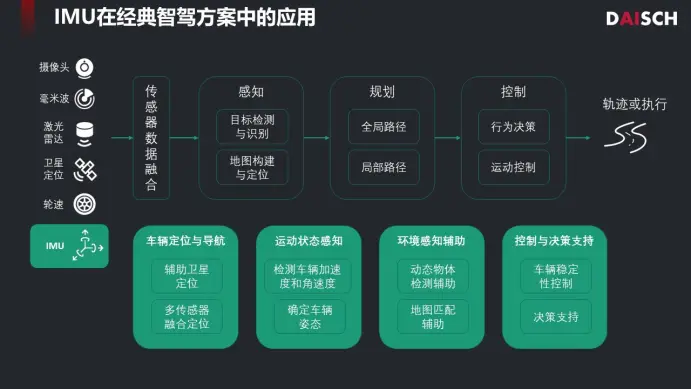
在经典智驾场景中IMU的应用已趋于成熟,它常用于以下模块及功能中:
-
车辆定位与导航:IMU可以测量车辆的加速度和角速度,结合GNSS位置信息,或其他传感器,如激光雷达、摄像头、里程计等进行融合,从而提高定位的精度和可靠性。
-
运动状态感知:IMU可以实时测量车辆的加速度和角速度,车辆的姿态信息帮助系统判断车辆的运动状态,以便及时调整动力输出和制动策略,确保车辆的安全行驶。
-
环境感知辅助:IMU可以检测到车辆的加速度和角速度变化,结合其他传感器的信息,帮助系统更快地识别和跟踪周围的动态物体。同时,IMU可以为地图匹配提供辅助信息,提高位置的准确性。
-
控制与决策支持:当系统需要选择最佳的行驶路径时,IMU可以提供车辆的当前位置、速度、加速度等信息,帮助系统评估不同路径的可行性和安全性。
PART.02
IMU在端到端智驾方案中的应用
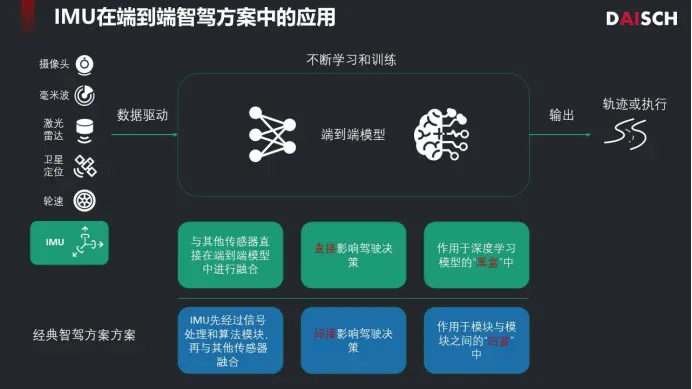
智能驾驶技术里的「端到端」,就类似于 ChatGPT 背后的大语言模型技术,从原始传感器数据(如摄像头、毫米波雷达、激光雷达等)到最终的控制指令(如加速、刹车、转向等)的全流程处理。
IMU在端到端智驾系统和非端到端智驾系统中的应用存在较大差异:
-
数据融合方式不同
在端到端智能驾驶系统中,IMU的数据通常与其他传感器(如摄像头、激光雷达等)的数据在深度神经网络中进行更直接的融合以实现最优的驾驶决策。
在非端到端智能驾驶系统中,IMU的数据往往会先经过传统的信号处理和算法模块,然后再与其他传感器的数据进行融合,不同数据在不同的处理阶段被逐步整合。
-
对系统决策的影响程度不同
IMU在端到端系统中对驾驶决策的影响更加直接。由于整个系统是通过深度学习模型直接从传感器输入到控制输出,IMU提供的车辆运动信息可以直接影响模型的输出结果。对驾驶决策的实时性影响较大。
在非端到端系统中,IMU通常作为辅助传感器之一,为系统的各个模块提供信息,但对最终决策的影响相对来说更为复杂和间接。
-
可解释性差异
由于端到端系统的深度学习模型通常是一个黑盒,IMU在其中的作用相对较难解释。虽然可以观察到IMU数据输入后系统的输出变化,但很难确切地理解模型是如何利用IMU信息做出决策的。
在非端到端系统中,IMU的作用通常更容易理解和解释。因为各个模块的功能相对明确,IMU的数据在不同模块中的处理过程和作用可以通过传统的算法和工程方法进行分析和解释。
PART.03
端到端智驾方案对IMU的进阶需求
值得一提的是,在日渐火爆的端到端智驾方案,IMU集成域控方案已成为80%智驾客户的首选,进而对IMU也提出了更高的挑战。

-
高精度与高稳定性
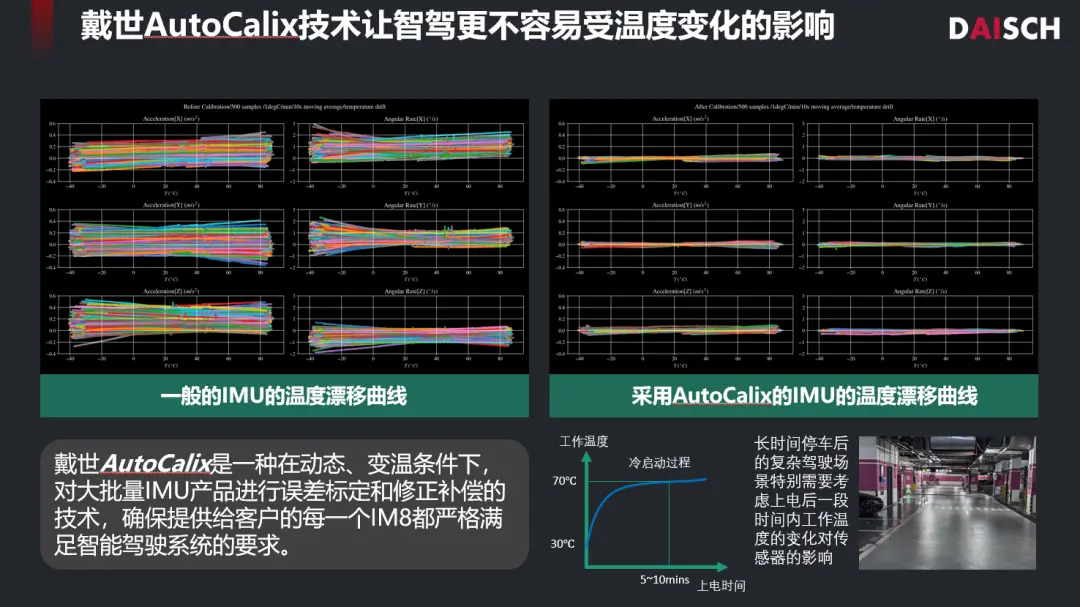
高精度的IMU可以提供更准确的车辆姿态信息,如俯仰角、横滚角和偏航角,帮助系统更好地理解车辆在空间中的位置和方向。同时IMU的稳定性对系统的可靠性至关重要。在长时间运行过程中,IMU需要保持稳定的性能,输出可靠的数据,不受温度变化、振动等环境因素的影响。
-
快速响应与高更新频率
端到端智能驾驶系统需要对环境变化做出快速响应,因此IMU需要具有快速的响应能力以及高频率更新数据。当车辆发生突然的加速、减速或转弯等运动变化时,IMU能够迅速检测到这些变化,并及时将数据提供给系统,以便系统能够快速做出相应的控制决策。
-
与深度学习模型的兼容性
端到端智能驾驶系统通常使用深度学习模型来处理传感器数据,因此IMU需要提供与深度学习模型兼容的数据格式。IMU需要能够与深度学习模型进行良好的集成。这可能需要提供特定的接口或软件库,以便模型能够方便地获取IMU的数据。
-
高可靠性与故障分析能力
端到端智能驾驶系统对安全性要求极高,包括在各种恶劣环境下的正常工作能力,如高温、低温、高湿度、强振动等环境,因此IMU需要具有高可靠性。
同时由于端到端系统的复杂性,IMU需要具备故障检测和诊断能力。当IMU出现故障时,系统能够及时检测到故障,并采取相应的措施,如切换到备用传感器或降低车辆速度,以确保车辆的安全。
PART.04
面向从低阶到高阶智能驾驶应用的DAISCH IM8

-
最佳的SWaP
由于域控内部空间紧张,对传感器的微型化及轻量化均提出了挑战。IM8采用戴世UltraCompact技术在实现微型尺寸下,达到了最佳的SWaP(Size、Weight、和 Performance)。
-
微秒级响应
IM8惯性模组可实现微秒级响应更新频率达1000Hz,独立姿态输出能够迅速检测到车辆动力学变化,并将数据及时反馈给系统,辅助系统做出对应决策。
-
功能安全ASIL-B 产品认证
IM8早在产品开发设计阶段,就已充分考虑了产品全生命周期内功能安全的要求,在流程和方法上严格遵循ISO 26262标准要求,从而获得功能安全ASIL-B 产品认证。
-
AutoCalix技术实现大批量一致性
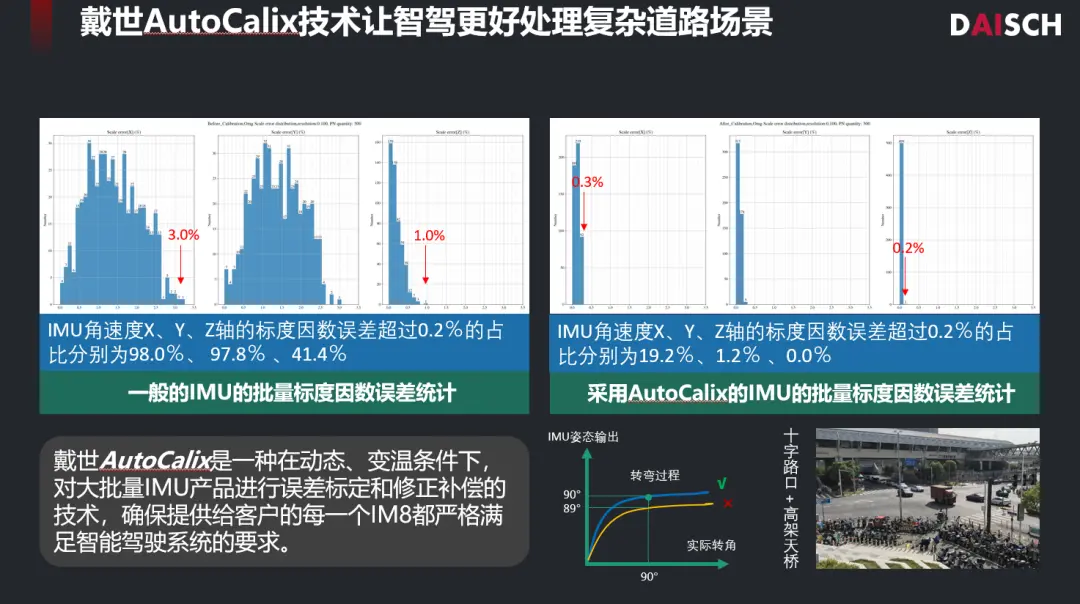
在性能方面,IM8采用戴世AutoCalix技术,对大批量IMU产品进行误差标定和修正补偿的技术,确保提供给客户的每一个IM8都严格满足智能驾驶系统的要求,同时兼具自学习及故障诊断能力。
从低阶智驾到高阶智驾,在技术层面,IM8凭借其高精度、轻量化、高可靠性的优势特点,全方位满足智驾用户方案需求,持续推动智能化未来加速实现。
经济效益上,创新的戴世IM8域控集成解决方案为客户平均实现每年千万级价值创造,相比原有技术方案,系统级降本比例超过50%。
自2023年量产以来,戴世IM8汽车智能驾驶运动感知方案已成为近十家主机厂及Tier1,近二十款车型的最佳选择。
除智能驾驶以外,戴世IMU在机器人、低空经济、智慧农业、工程机械等领域都发挥着不可或缺的作用,随着智能时代的到来,戴世IMU将迎来更为广阔的市场前景。
关于戴世
about DAISCHDAISCH戴世,创立于2015年1月。公司致力于向汽车、机器人和更广泛的领域提供高性能高稳定性IMU、传感器、惯性导航系统和数据处理软件等产品。
戴世的高精度IMU系列产品采用全温域全量程标定工艺精心标定,能够提供可靠的高精度roll, pitch, yaw测量数据。这些数据是自动驾驶、人形机器人和其他智能装置的控制算法和智能策略不可或缺的。
戴世IFS3000汽车测试系统广泛应用于制动测试,ADAS测试,操稳测试,自动驾驶系统性能测试等场景。
凭借优异的产品性能、可靠的运营体系和大规模交付能力,戴世赢得了每一家客户的青睐,其中,许多客户是所在领域的领先企业。



编辑推荐




最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
