




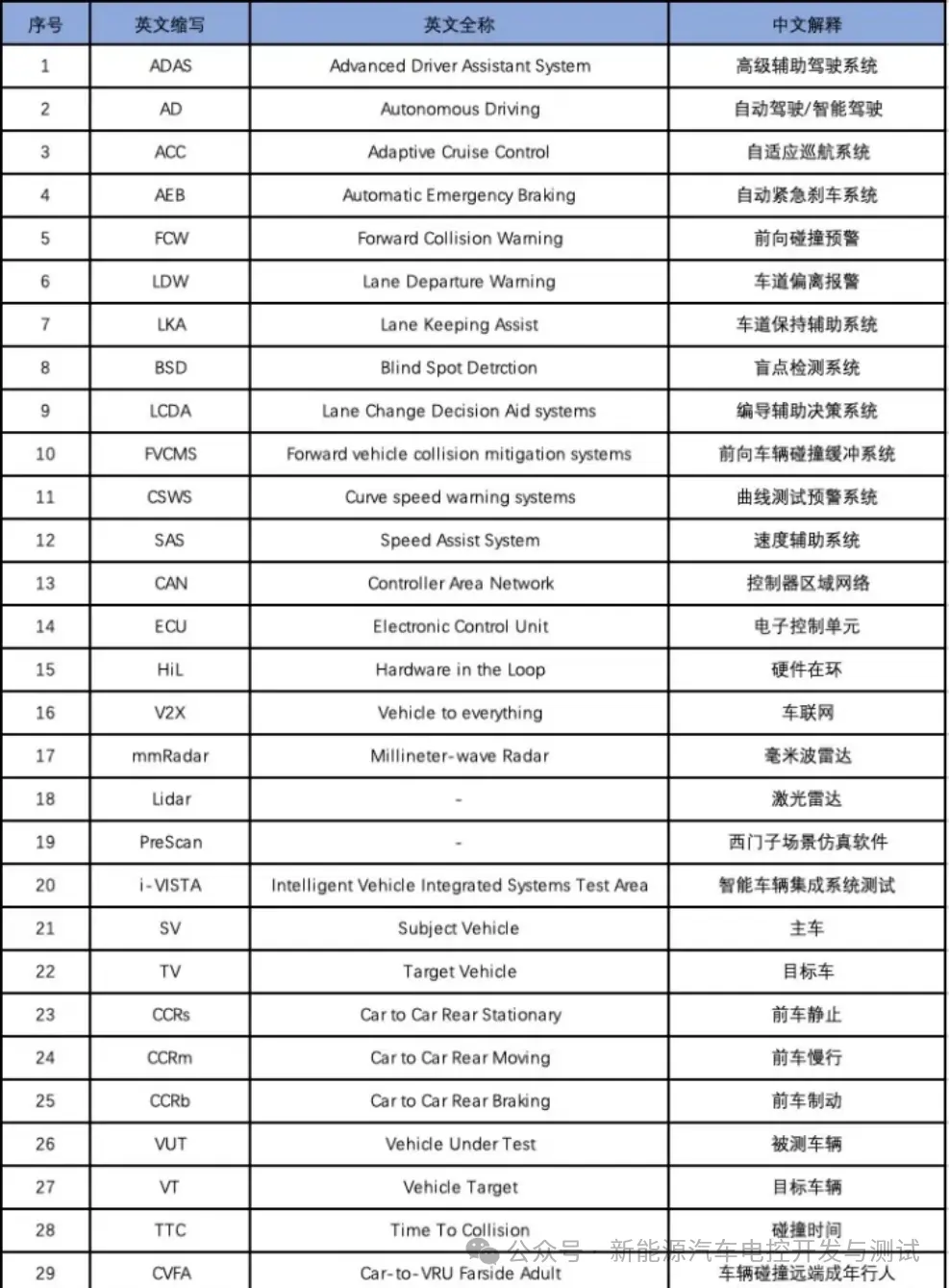
 广告
广告





















































【技术干货】带你了解ADAS-HIL测试方案

4.1、场景软件
场景软件目前行业内多使用PreScan及VTD进行场景仿真模拟,本文以PreScan进行介绍。PreScan是一个专业的ADAS场景搭建软件,它由多个模块组成,这些模块可以满足ADAS系统的开发和测试需求。直观的图形用户界面(GUI)用于创建场景和传感器建模,工程师无需软件工程经验,可快速搭建测试场景。

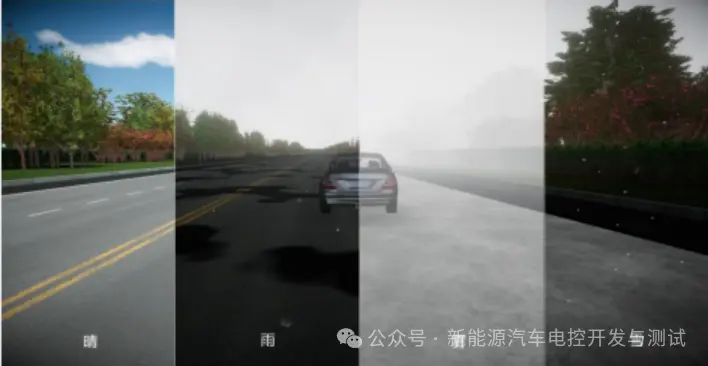
环境模型:
路面及路边设施数据库、交通标志数据库、建筑物、绿化带数据库、用户自定义3D模型导入、天气光照、车灯路灯。


传感器模型:
摄像头、雷达、车道线、目标传感器等;

目标传感器
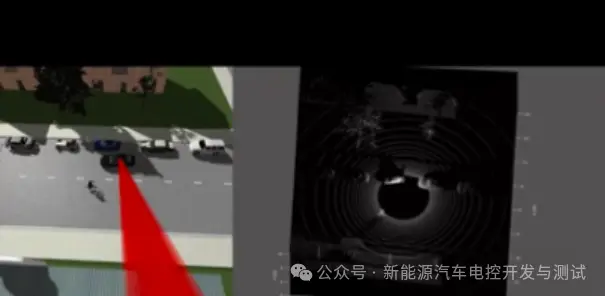
毫米波激光雷达

摄像头模型
执行器模型:行人、自行车、商用车、摩托车;测试场景-标准测试场景:
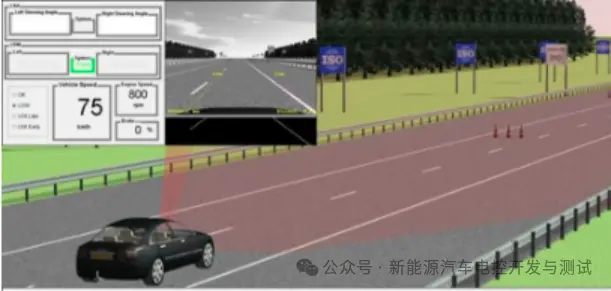
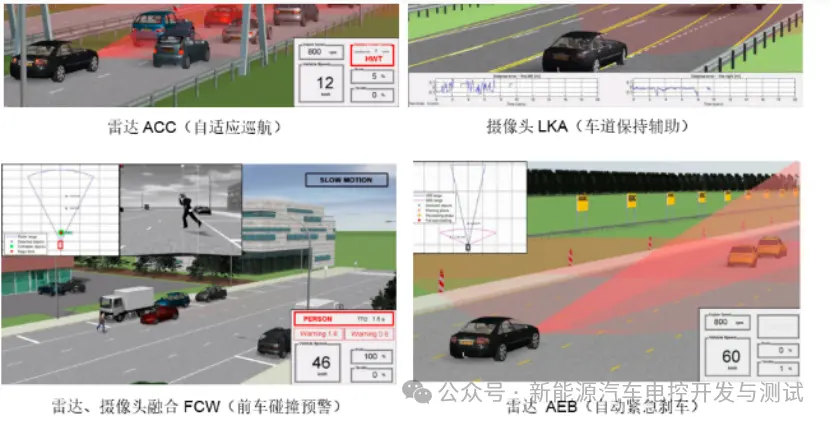
LDW (ISO、NHTSA)
ACC (ISO)
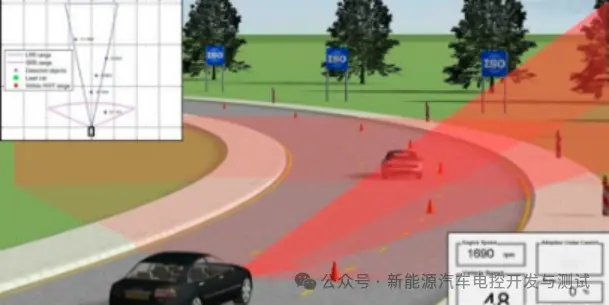
测试场景-复杂测试场景:
场景模型——定制测试场景:

公交/限速路口

高架/十字路口
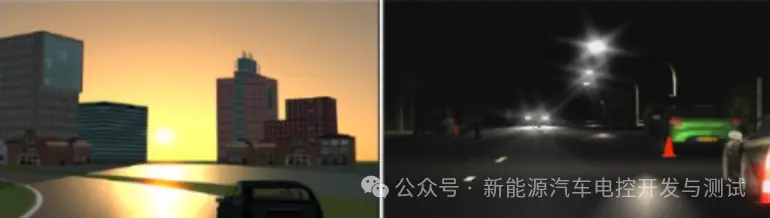
太阳光/路灯
4.2、实验管理软件
本文实验管理软件基于VeriStand软件 平台进行开发,主要用于监控运行在实时机中车辆模型的输入输出接口以及总线的CAN报文输出。VeriStand用于更有效地创建测试应用(如硬件在环仿真)。它以简单易用的形式提供用于实时测试应用的常用功能,用户无需编程,从而降低了开发成本和风险。使用上位机软件无需具备编程知识,但是用户可以使用各种软件环境,如LabBIEW、MathWorks公司的Simulink软件、ANSI C/C++等建模和编程,实现顶制和扩展。
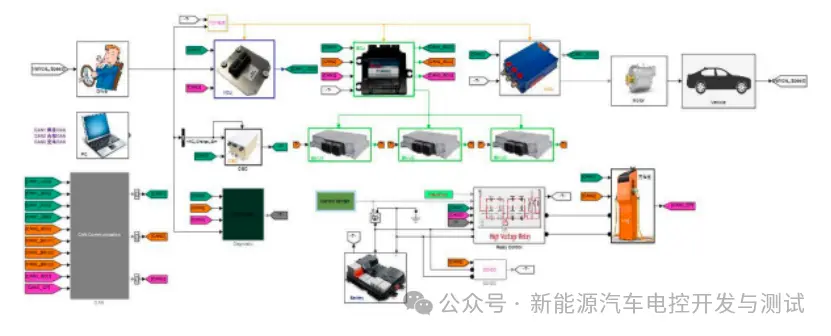
4.3动力学模型软件
整车实时仿真模型为HiL系统提供完整的虚拟车辆环境。
5、测试场景库
5.1、ACC试验工况示例
ACC(Adaptive Cruise Control),自适应巡航控制系统是一种智能化的自动控制系统,他是在早已存在的巡航控制技术的基础上发展而来的。在车辆城市过程中,安装在车辆前部的车距传感器(雷达)持续扫描车辆前方道路,轮速传感器采集车速信号。当与前车之间的距离过小时,ACC控制单元 可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。自适应巡航控制系统在控制车辆制动时,通常会将制动减速度限制在不影响舒适度的程度,当需要更大减速度时,ACC控制单元会发出声光信号通知驾驶者主动采取制动操作。当与前车之间的距离增加到安全距离时,ACC控制单元控制车辆按照设定的车速行驶。
ACC试验场景包扩目标车静止、目标车低速、目标车减速、横向重叠共4个场景,针对每个试验场景,包括体验和安全两个维度。目标车静止场景主车车速分别为30Km/h、40Km/h、50Km/h和60Km/h、目标车速低速场景主车车速分别为90Km/h、100Km/h、110Km/h和120Km/h、目标车速减速场景目标车车速为70Km/h,分别以-3m/s和-4m/s2的减速度制动到停止,这三个工况主要考察ACC的减速能力。横向重叠场景的重叠率分别为正负50%,考察ACC的目标识别能力。
以主车1的车宽为基准,目标车2与主车1横向重叠的部分除以主车1宽度得到横向重叠率(不计算外后视镜的宽度)。以主车1的中心线为参考线,当目标车2的中心线位于主车1的中心线右侧时,横向重叠率为负值;当目标车2的中心线位于主车1的中心线左侧时,横向重叠率为正值。下图为横向重叠率150%和50%的示意图。
6、总结
技术先进、成熟稳定的ADAS hil测试系统,可以在实验室阶段实现ADAS的各种控制功能和故障诊断功能验证,从而缩短路试时间、减少路试成本,降低路试风险,是ADAS测试的重要一环,也是整车企业核心岗位之一。
来源:新能源汽车电控开发与测试



编辑推荐




最新资讯
-
国内现货!GRAS 46AE/146AE 限时优惠直降 5
2025-04-22 16:22
-
仿真测试必要性及标准法规
2025-04-22 16:22
-
福特退出中国,进入倒计时!
2025-04-22 16:21
-
高效三通道双向电源:释放测试潜能
2025-04-22 09:23
-
R171.01对DCAS的要求⑦
2025-04-22 09:20
