




 广告
广告





















































【技术干货】带你了解ADAS-HIL测试方案

1、背景
ADAS(Advanced Driber Assistant System),高级驾驶辅助系统,先进驾驶辅 助系统,作用于辅助汽车驾驶,通过感知、决策和执行,帮助驾驶员察觉可能发生的危险,是提高安全性的主动安全技术,保障行驶安全,已成当前汽车装载必备系统;并普遍认为是实现自动驾驶AD的过程性技术。技术先进、成熟稳定的ADAS hil测试系统,可以在实验室阶段实现ADAS的各种控制功能和故障诊断功能验证,从而缩短路试时间、减少路试成本,降低路试风险。
目前,美国、欧盟、中国等相继出台严格的主动安全测试法规(Euro-NCAP、C-NCAP、ISO、NHTSA、SAE、ECE、ADSC....),对市场上各种ADAS控制器ACC、AEB、LKA、BSD、LDW、FCW等进行严格要求。
市场上ADAS传感器型号、参数、性能多种多样,不同传感器协同工作有效性难以保证;路测成本大、周期长、测试覆盖度不全面、测试危险程度高;而ADAS HiL测试系统能够实现在实验室环境下完成对ADAS控制器法规要求下的功能测试,且测试成本低,可复用性好,使用ADAS HiL测试可以有效提高研发进度,缩短上市时间,降低路试风险。
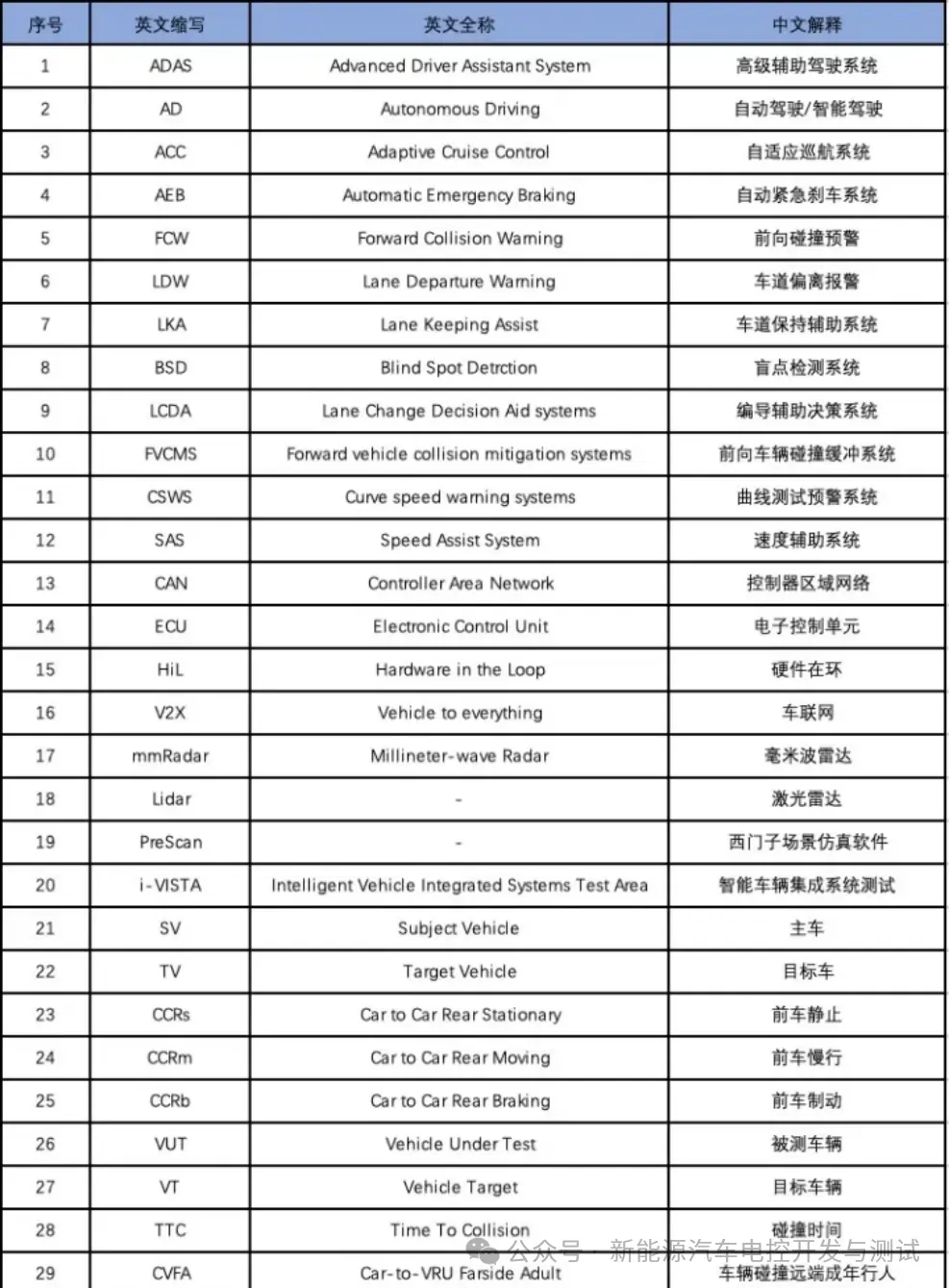
专用术语
2、方案介绍
ADAS HiL测试系统方案主要由两部分组成:硬件平台和软件平台。
硬件平台主要用于搭建完整可靠的电气系统架构,主要包括机柜、摄像头测试暗箱、高性能工作站、实时系统、通讯板卡、驾驶模拟器、路由器、显示器等。
软件平台主要用于搭建ADAS测试场景以及实时监测输入输出状态的HMI界面,包含场景软件、试验管理软件、车辆动力学模型、传感器模型,试验管理软件负责测试实验管理,场景模型与车辆动力学模型集成,实现对ADAS控制器的仿真测试。
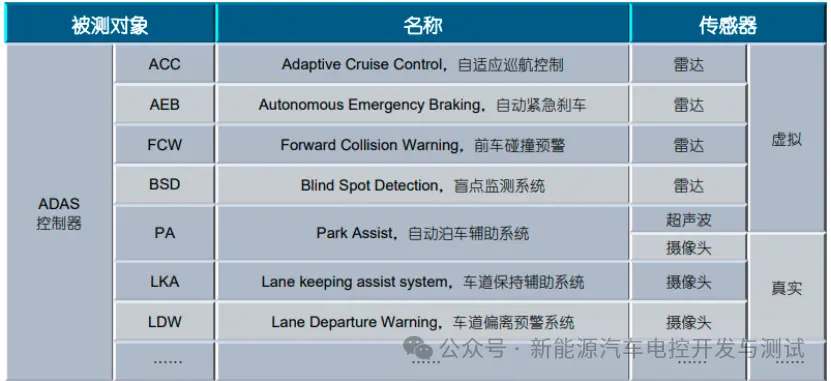
2.1系统方案——测试对象
ADAS控制器,包括ACC、AEB、FCW、BSD、LKA、LDW、TSR、PA等
2.2系统方案——测试功能
提供虚拟测试环境,实现不同工况下ADAS控制器的功能验证;
多种物理传感器模型精准识别场景中目标形状、距离、相对速度及方 位角等参数;
高精度地图数据导入,模拟真实路况测试;
标准测试工况快速建立,复杂交通流可自定义;
支持扩展用于其他测试:
- MIL——扩展用于ADAS控制算法MIL测试;
- DIL——集成驾驶模拟器或驾驶座舱用于驾驶员在环测试;
- 系统级测试——联合真实雷达和激光雷达用于传感器融合测试;
- V2X测试——具有V2X传感器用于自动驾驶前瞻性研究测试;

2.3 系统方案——系统架构
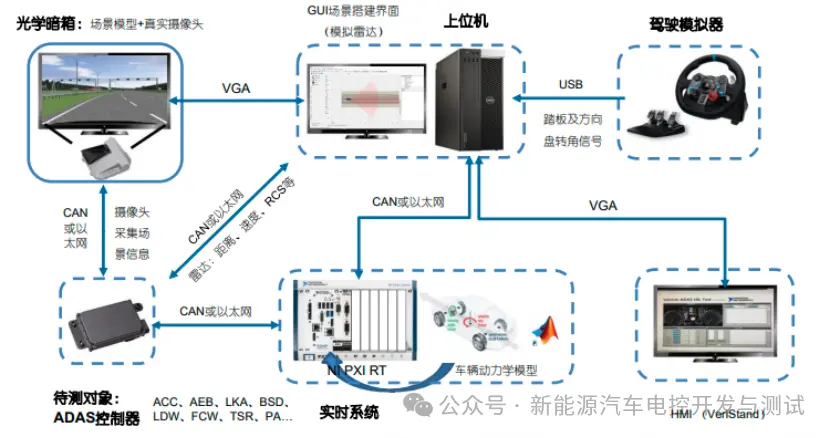
2.4系统组成
测试系统包含两个方面:硬件系统和软件系统

硬件系统主要包括以下几个方面:
1)实时系统:运行车辆动力学模型,接收上位机发送方向盘转角信号、踏板信号数据,与被测对象实时进行通讯交互;
2)上位机:连接实时系统和驾驶模拟器,运行场景模型和HMI界面;
3)摄像头光学暗箱:提供摄像头采集视频流信息数据环境,防止外界干扰;
4)毫米波仿真暗箱:提供毫米波雷达接收和发射毫米波环境,防止外界干扰;
5)VRTS系统:模拟毫米波雷达目标;
6)驾驶模拟器:与虚拟驾驶环境实时交互方向盘转角及踏板信号数据。
软件系统包括 :
1)三维虚拟场景模型软件:用于模拟虚拟驾驶环境,包含环境模型、传感器模型和执行器模型。其中包括道路模型(支持Open Street Map、openDRIVE、underlay、GPS跟踪倒入)、设施模型(车道线、斑马线、道路标志等)、移动物件、气象条件模型(光线强弱、雨雪雾天等)等;传感器模型包含摄像头(鱼眼、单目及双目)、毫米波雷达、超声波雷达、激光雷达、理想传感器、真值传感器等;执行器模型包含轿车、摩托车、商用车、行人、自行车等。
2)HMI软件:人机交互界面软件,通过该界面发送接收指令信号,实时监测上下位机所有输入、输出状态并进行数据记录与分析;
3)动力学模型:基于Matlab/Simulink进行搭建或使用商业化模型,提供完整的车辆动力学模型,提高仿真精度。



编辑推荐




最新资讯
-
国内现货!GRAS 46AE/146AE 限时优惠直降 5
2025-04-22 16:22
-
仿真测试必要性及标准法规
2025-04-22 16:22
-
福特退出中国,进入倒计时!
2025-04-22 16:21
-
高效三通道双向电源:释放测试潜能
2025-04-22 09:23
-
R171.01对DCAS的要求⑦
2025-04-22 09:20
