




 广告
广告





















































智能汽车域控制器知识全解

随着汽车智能化,网联化的渗透与普及,汽车电子电气零部件占汽车的比重也逐渐提高。高级驾驶辅助系统,车载多媒体娱乐系统等逐渐成为消费者关注且左右购买决策的功能配置。越发复杂的系统对传感器、电子控制器(Electronic Control Unit, ECU)的数量有了需求,如自动驾驶的摄像头,毫米波雷达,多媒体娱乐系统的副驾驶娱乐屏幕,HUD 抬头显示系统,控制发动机表现的 ECM 模块、管理新能源汽车电池的 BMS 模块以及用于 360 度环视影像融合计算的 AVM 模块等等。据焉知汽车数据,一辆现代豪华汽车中通常包含了70到100个ECU。传统的分布式电子电气架构(Electrical/Electronic Architecture, EEA)由于其:1. 算力分散无法高效利用 ;2. 线束成本重量劣势;3. 无法支持高带宽车内通信;4. 后续升级维护困难等多维度原因,已无法满足发展需求。集中式电子电气架构应运而生,并且在未来最终会走向中央计算平台的形式。
1、 算力分散无法高效利用。
分布式架构下汽车搭载数十个控制器,且为保证性能稳定性及安全性,每个控制器芯片硬件算力相对其上运行的程序都有所冗余。这就导致从整车维度,各个控制器的能力“各自为政”,无法高效协同。反之在集中式电子电气架构下算力在行车时为辅助驾驶服务,在驻车休息时可为车载游戏提供运行算力。
2、 线束成本及重量劣势。
庞大的 ECU 数量同样意味着复杂、冗长的总线线束。据电子工程世界网数据,一辆高级汽车的线束使用量约 2km,重量在 20~30kg。在线束中,线缆材料本身重量占到线束总重量的 75%左右。集中式的电子电气架构以及域控制器的引入,可极大的缩短线束的使用量。
3、 无法支持高带宽车内通信。
分布式 ECU 时代,计算和控制的核心是 MCU 芯片,传输的基础核心是基于传统的 CAN、LIN 和 FlexRay 等低速总线。随着 ECU的不断增多,导致总线负载增加,基本上达到允许的上限了,这样容易导致信号丢帧、总线堵塞等技术难题,从而导致安全隐患。但在域控制器时代,高性能、高集成度的异构芯片作为域的主控处理器,域内统一调度控制,域外通过以太网等进行高速通信。目前百兆和千兆的以太网已在多款新车型上得到应用。车载以太网每节点实施成本高于 CAN 、 LIN,与 FlexRay 相当。在未来,数据传输速度的制约将使得车载以太网替代传统总线成为必然。
4、 系统集成及 OTA 维护困难。
各个 ECU 开发主要由各 Tier1 提供主机厂,主机厂由内部团队进行集成整合。对主机厂集成开发能力,供应商管理能力提出了很高的挑战。此外,分布式的架构零散的 ECU 布局也难以支持车载软件在线升级(OTA),从而加大了软件后期维护迭代的难度。目前,OTA 已经从部分新势力车企的独门绝技,逐渐大众化,各个车企的更新迭代频率也在快速提升。据国家市场监督管理总局披露的数据,2021 年各大车企报告 OTA 升级 351 次,较 2020 年同期上升了 55%,而涉及到的车辆达到 3424 万辆之巨,更是较 2020 年同期暴增了307%。
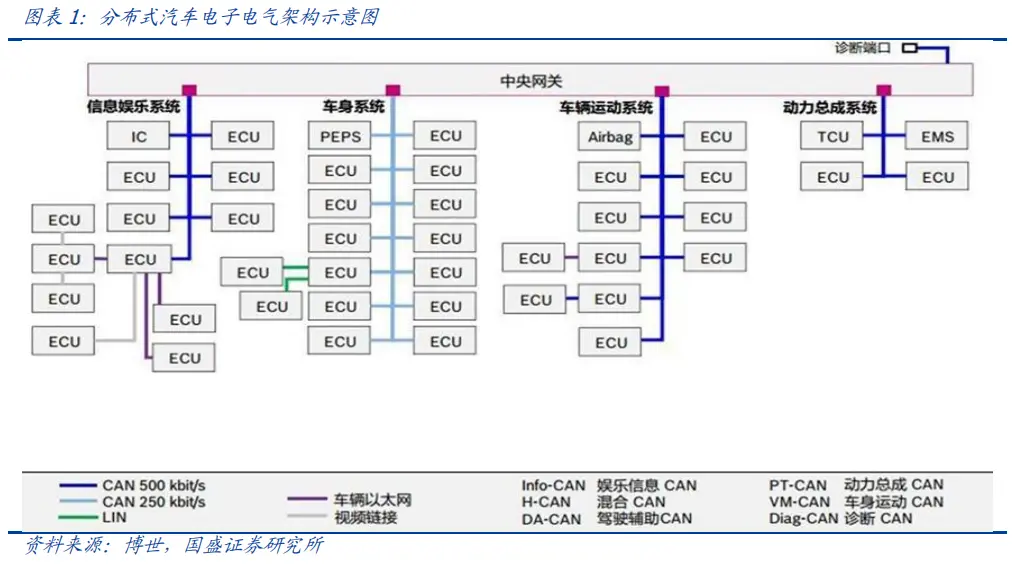
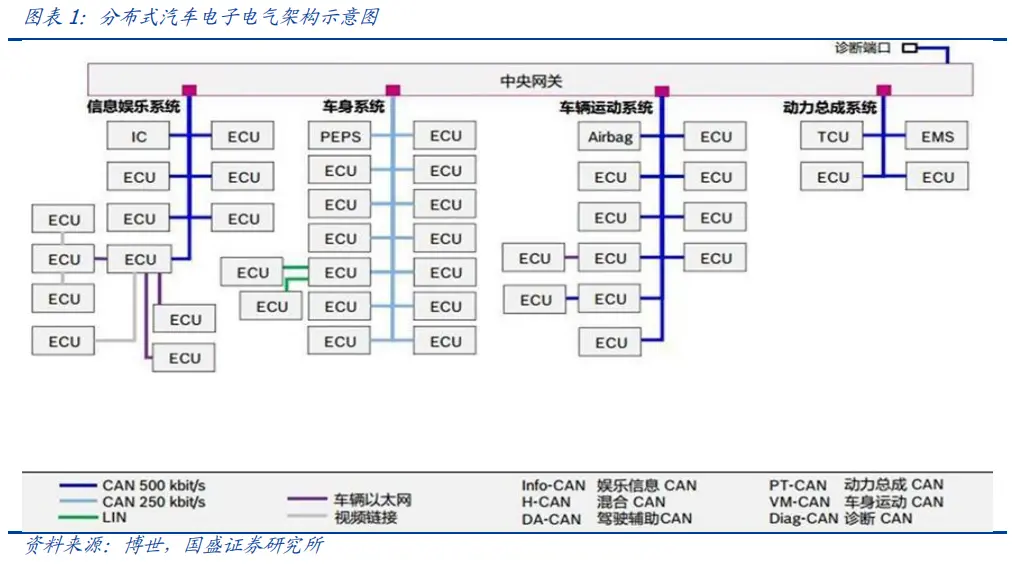
传统汽车的电子电气架构一般采用分布式,其控制中枢由电子控制单元ECU通过CAN总线和LIN总线连接,在传感器、电源及通信芯片、执行器等零部件的配合下,实现对汽车状态与功能的操控。每个控制系统采用单独的 ECU,不同的电控系统功能保持独立性,每增加一个功能就需要增加一个 ECU,因此传统汽车智能功能的增加和升级主要依赖于 ECU 和传感器数量的累加。
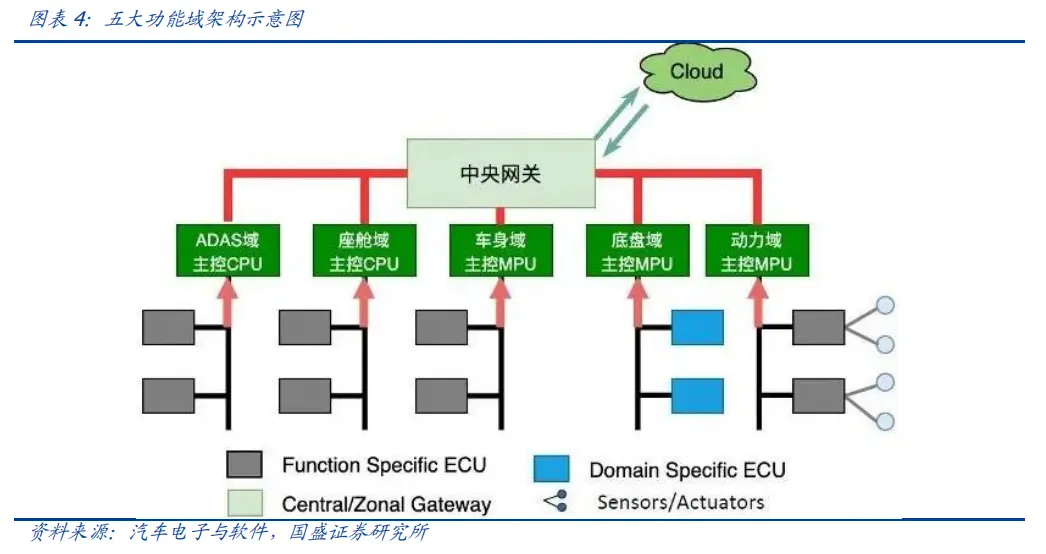
在电子化和智能化发展的需要下,传统的分布式架构逐渐进化为域集中式架构,“域”和“域控制器”产生。域控制器最早由博世、大陆、德尔福等 Tier1厂商提出,通过利用处理能力更强的多核 CPU/GPU 芯片,引入以太网并将分散的 ECU 集成为运算能力更强的域控制器来相对集中地控制每个域,从而解决分布式架构存在的成本、算力等局限性。
域集中式架构的优势主要包括:
1)域集中式架构可以节约成本、降低装配难度。在分布式架构中,随着 ECU 数量增加产生的大量内部通信需求,导致线束成本增加并加大装配难度;而域集中式架构将传感与处理分开,传感器和 ECU 不再一对一,管理更便捷,有效减少了 ECU 和线束的数量,从而降低硬件成本和人工安装成本,同时更有利于部件布局。
2)域集中式架构可以提高通信效率,实现软硬件解耦,便于整车 OTA 升级。分布式架构中,来自不同供应商的 ECU 的软件开发框架和底层代码不同,导致冗余,并提高维护和 OTA 统一升级难度;而域集中式架构做到对各 ECU 进行统一管理与信息交互,统一软件底层开发框架,从而便于未来的 OTA 升级和拓展功能的实现。
3)域集中式架构能进一步集中算力,减少冗余。分布式架构中的各个 ECU 之间算力无法协同,相互冗余,产生极大浪费。而域控制架构将原本分散的 ECU 进行算力集中,统一处理数据,减少算力冗余,更能满足高阶自动驾驶对于算力的高要求。
基于功能集中分区,博世等传统 Tier1将汽车电子控制系统分为动力域(安全)、底盘域(车辆运动)、座舱域(娱乐信息)、自动驾驶域(驾驶辅助)和车身域(车身电子)五域。
动力域用于动力总成的优化与控制,同时兼具电气智能故障诊断、智能节电、总线通信等功能。动力域控制器是一种智能化的动力总成管理单元,借助 CAN/FLEXRAY 实现变速器管理,引整管理电池监控交流发电机调节。其优势在于为多种动力系统单元(内燃机、电动机发电机、电池、变速箱)计算和分配扭矩、通过预判驾驶策略实现 CO2减排、通信网关等,主要用于动力总成的优化与控制,同时兼具电气智能故障诊断、智能节电、总线通信等功能。
- 下一篇:吉利全球五大试验基地
- 上一篇:深度解读DevOps在汽车行业的应用



编辑推荐




最新资讯
-
2025智驾“封神榜”测评|小鹏MONA M03智车
2025-04-29 18:24
-
风噪测试在电动汽车时代的关键作用
2025-04-29 11:34
-
汉航车辆性能测试系列之操纵稳定性测试--汉
2025-04-29 11:09
-
新能源汽车热管理系统验证体系PITMS正式发
2025-04-29 11:09
-
试验载荷谱采集
2025-04-29 11:07
