




 广告
广告





















































软件定义卡车(SDT)思考

02、如何实现软件定义卡车SDT
2.1 集中式的架构
集中式的电子电气架构是实现软件定义卡车的基础,商用车相对于乘用车有一个最明显的特点就是车型变种多,单车销量少,零部件供应商通常会通过标准化的产品适配不同OEM的车型,甚至通信协议都不用更改,这也就是SAE J1939标准在商用车行业使用的初衷,另外,在车辆开发过程中,经历过协调多个供应商进行一个功能变更的历程,就会有深切的感悟,太难了,供应商开口就是增加费用,开发周期要延长,特别是对于新势力OEM来说,新产品在未来市场的销量存在不确定性,相对于传统头部OEM没有成熟的供应链体系,在与供应商合作过程话语权低,作为新势力OEM如何在面临上述挑战时逐步构建自身的优势,开发集中式的电子电气架构是必要的途径。
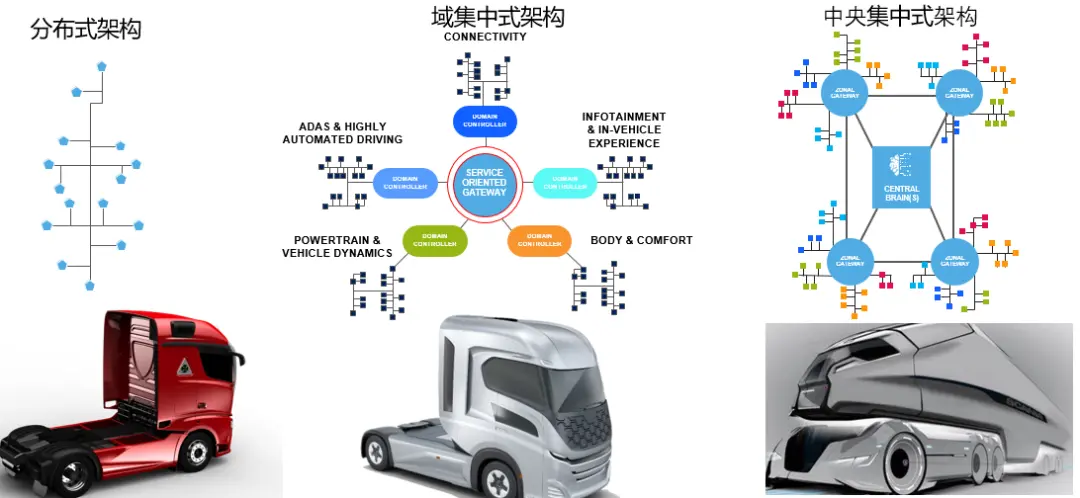
在集中式架构中,传感器/执行器/嵌入式ECU可沿用现有供应商的成熟产品,在满足功能、性能目标的前提下降低开发成本,但是在域控制器及以上产品中,卡车OEM需要逐步构建自主开发能力,从而能够将核心软件部署在上面,构建自己的差异化竞争力。上述所说的核心软件,及能够带来TCO优化的软件,例如我在《燃料电池重卡整车能量管理》中提到的等效氢耗最小的能量管理策略(ECMS)、基于智能驾驶超视距能力的预测性自适应巡航控制策略(PACC)、基于效率的电机转矩分配优化、低压系统能量管理策略等。
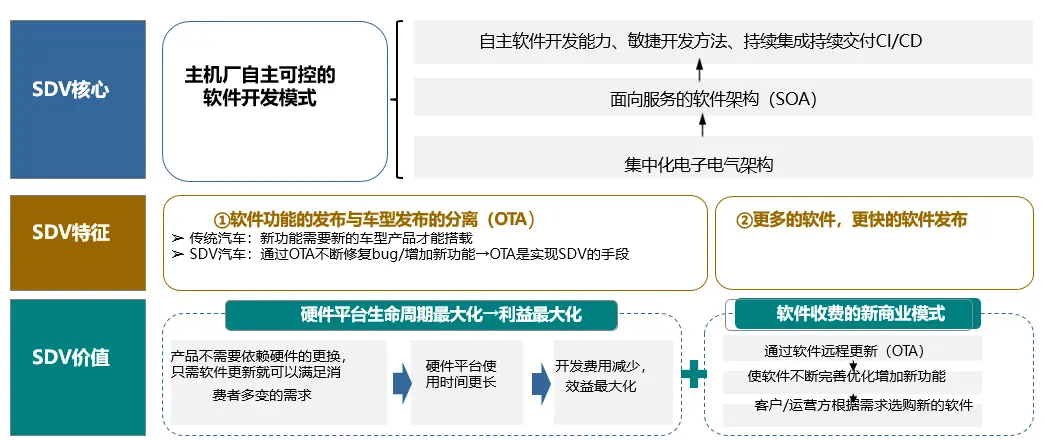
2.2 自主可控的软件开发能力
实现软件定义卡车(SDT)需要在集中式的电子电气架构基础上,采用面向服务的软件开发方式,逐步构建自主可控的软件开发能力。而构建整车全域的软件开发能力是一个漫长且不太可能实现的事情,需要有坚定的战略定力及雄厚的资金储备,所以作为卡车OEM应该从动力域、车身域入手逐步扩展到底盘域、智驾域。
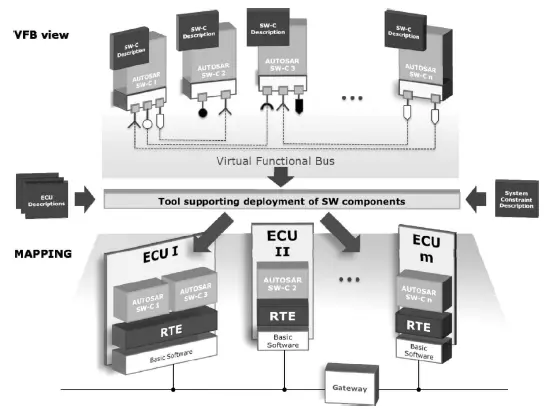
自主可控的软件开发能力需要以软硬解耦为前提,应用软件的开发应降低对硬件和底层软件的依赖,如果应用软件开发过程中处处受限于黑盒的底层将会束手束脚,因此需要有AUTOSAR的基础软件,AUTOSAR的核心思想在于“统一标准、分散实现、集中配置”,“统一标准”是为了给各厂商提供一个开放的、通用的平台,“分散实现”要求软件系统高度的层次化和模块化,同时还要降低应用软件与硬件平台之间的耦合,不同的模块可以有不同的组织及人员去完成,“集中配置”及所有模块的配置信息以统一的格式集中整合并管理起来,从而配置成一个完整的系统。
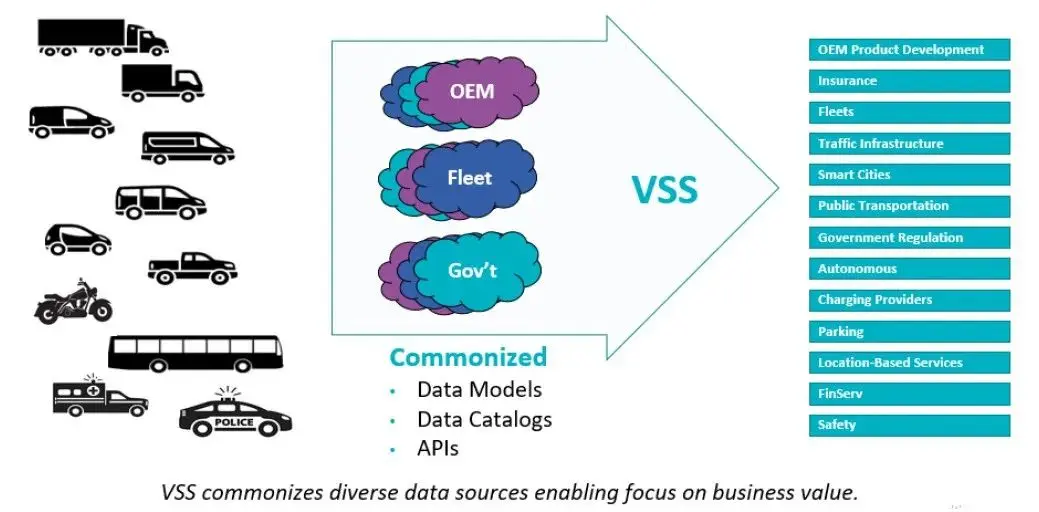
2.3 开放标准的车辆接口(Vehicle API)
商用车应用的主要下游行业场景由于行业特性和运输要求,对于车辆的需求差异较大,例如:
为了满足上述不同场景对数字化的需求,目前行业内普遍采用后装车联网终端的方式,例如G7易流,通过在不同品牌车辆上加装IoT智能终端设备,获取车辆的部分数据同时结合云端算法,向货运经营者提供覆盖车辆位置与轨迹、司机驾驶安全管理、货物温度管理、货物流向管理等丰富场景、软硬一体的车队数字化管理服务。但是这种方式首先需要在车辆上另外加装冗余的车联网终端,因为在目前的卡车上不管是国六的燃油车还是新能源卡车(满足GB/T32960)都装有车载终端,增加车辆的改制及硬件成本,同时加装的设备能够获取的车辆数据也是有限的,因此需要构建一个标准化的开放的车辆接口,而COVESA VSS(Vehicle Signal Spefication)就是一个这样的规范,其提供了一种将车端的数据安全、有效、无歧义的开放给第三方运营服务商,从而促进开放协作。



编辑推荐




最新资讯
-
Rivian与MAE合作定制电动车测试设备安装项
2025-04-10 14:41
-
重型商用车辆和客车的动力学——操纵性
2025-04-10 14:40
-
新能源汽车VCU、BMS、MCU控制器图解
2025-04-10 14:39
-
陶琳回应电动车辐射高:特斯拉辐射值远低于
2025-04-10 13:14
-
nCode2025版本发布说明
2025-04-10 13:12
