




 广告
广告





















































真实风条件评估空气动力阻力在道路距离预测中的应用

道路测试
本研究中使用的车辆是一辆2014年款的特斯拉Model S,配备了19英寸轮毂、245/45R19轮胎和标准的螺旋弹簧悬挂系统,相关开发信息详见参考文献。Model S是一款采用快背式设计的电动汽车,单个交流电机通过开放式差速器驱动后轴。动力由一个85千瓦时的能源存储系统提供,该系统由18650规格的锂离子电池组成。传动系统和车载能源存储系统为比较道路能耗与车辆空气动力学阻力源的预测负载提供了新的方法。这些阻力源包括轮胎滚动阻力、运行辅助低压系统所需的能量、轴承损失和空气阻力。
使用Aeroprobe制造的三孔皮托静压探头来收集瞬时偏航角数据。该探头类似于用于测量相对风速的标准皮托静压探头,带有一个前向口测量总压,并在流向平行的方向上有一圈八个端口测量静压。此外,两个孔位于主总压口的两侧。两个McLaren Electronics制造的差压传感器用于从探头收集数据。第一个传感器测量动压(总压与静压测量之间的差值),而第二个传感器测量侧面总压口的压差。探头、传感器和GPS发射器安装在位于车辆车顶、挡风玻璃和可移动全景车顶玻璃之间的整流罩内,如图1所示。这提供了一个可重复的中心线位置,远离车辆产生的湍流流结构。在本文数据采集之后,决定将安装位置移至引擎盖上,以减少车顶流加速对测量的影响。
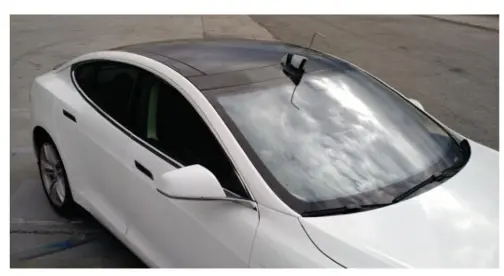
图1. 测试车辆车顶上的探头和安装架
数据采集系统由Motec CDL仪表盘组成,可以实时监控两个差压读数。压力轨迹与GPS数据(速度、航向、海拔、经纬度、时间和日期)以及三轴加速度计数据一同采集。第二个压差(左右前向口)除以第一个(中心前向口与静压圈)计算所谓的贝塔系数。然后,贝塔系数通过拟合二次函数来计算偏航角。该函数由探头制造商提供,每个探头都经过单独校准,提供一组独特的二次系数。校准是在一系列速度下完成的,整个测试中使用了最接近预期测试速度的校准值(在此情况下为0.073马赫或56英里/小时,而测试速度主要为55英里/小时和75英里/小时,取决于道路状况)。从这些数据集中,使用动压和温度计算出风速。该数据和偏航角可用于将风分解为纵向(平行于车辆中心线)和横向侧风分量。最后,将总纵向分量与车辆的GPS速度进行比较,以确定顶风或顺风的大小。
如前所述,纯电动传动系统为测量几项能耗指标提供了新的机会。其中两个最有用的指标是高压电池的能量消耗(以千瓦时为单位)和通过驱动逆变器的功率(以千瓦为单位)。驱动逆变器将电池的直流电转换为电机使用的交流电,是传动系统中两个主要部件之一,另一个是电机。然而,这两种测量功率的方法都不是纯粹的空气动力能耗测量。在测试速度下,空气阻力是最大的能耗源,但通过驱动逆变器的功率也用于克服轴承摩擦和轮胎滚动阻力。此外,从电池中消耗的能量还用于驱动传统的辅助系统,通常通过DC-DC转换器降低电压,这本身也存在效率损失。在最终数据分析中,仅使用了驱动逆变器的功率,因为它更接近代表空气动力功率。预计来自电池的更多能耗源增加了数据的波动性。
测试车辆的CAN总线被用于在测试期间记录所有动力系统的功能。为了将两组不同的数据集结合起来,一个GPS接收器被添加到Motec数据系统中,此外还记录了车辆自身CAN信号中的GPS系统。然后,将两条GPS速度轨迹匹配,以提供时间信号的偏移量。
CFD仿真
在先前的论文中,描述了包括真实风况的CFD仿真方法。使用格子玻尔兹曼法(LBM)进行仿真,如文献中所讨论的那样。这一方法也被应用于之前的研究。
首先进行了模拟,以在车辆前方加入时间变化的偏航角,模拟空间均匀的阵风和主导的侧风。其次,使用车辆前方的非均匀和时间依赖的速度波动,模拟了道路环境中的湍流风况。这些湍流波动被缩放至一个代表道路上湍流强度的规定幅度。湍流的长度尺度和频率谱由文献中代表性的风数据决定。添加上游湍流的方法在我们之前的工作以及文献中有所描述。
在本研究中,再次使用了这两种方法来确定道路风环境对车辆空气动力学性能的影响。通过动态偏航角仿真生成阻力与偏航角的曲线。进行了两次动态偏航仿真,一次是在零湍流强度下进行的,另一次则在7%的湍流强度下进行。这一湍流强度基于先前在文献中的经验,代表了从道路测量中计算出的中等湍流强度。这两个仿真用于表示车辆对主导平均风和波动风的敏感度图。然后,将道路上测得的风特性与这个性能图结合起来,确定风况对车辆阻力的影响,并与零风条件进行比较。
道路测量结果
通过上述提到的CAN总线来测量车辆的功率消耗,并与从CFD或风洞测试预测的结果进行比较。该策略探索了滑行技术的替代方案,即通过测量传动系统的即时功率来确定空气动力负载,而不是断开传动系统并通过减速率来找到道路负载曲线。测试车辆的纯电动传动系统允许测量其转换为机械扭矩的功率。在加利福尼亚的多个路段上进行了一系列驾驶循环,目的是收集能代表典型长途旅行的数据,并进行短途行驶,但要故意处于高风况下。前者用于帮助定义在高速下车辆主要受到空气动力影响的情况下,车辆最常遇到的条件(偏航角和湍流水平)。后者则用于更深入分析风况与车辆能耗之间的关系。
长途驾驶
在加利福尼亚州的高速公路上进行了两段延长驾驶的数据收集。第一段是在旧金山和洛杉矶之间的5号州际公路上靠近贝克斯菲尔德的部分路段,该路段是加利福尼亚州的主要南北走廊(如图1所示),驾驶方向为南行。第二段是在洛杉矶和圣地亚哥之间靠近圣奥诺弗雷的路段,同样是在5号州际公路上,该路段靠近海洋,数据在北行和南行两个方向上都进行了收集。最终数据包括贝克斯菲尔德驾驶中的多个南行路段以及圣奥诺弗雷驾驶中两个方向的两次往返。为了确保只收集和使用相关数据,车辆的巡航控制仅在车辆能够长时间以恒定速度行驶且不受交通干扰的情况下设置。目标速度为75英里/小时,但有时由于交通状况较低,数据段的长度在0.5英里至23英里之间。尽管其他车辆和道路障碍物必然会对结果产生影响,但这些扰动是车辆设计时需要考虑的真实环境的一部分。

图2. 加利福尼亚州测试地点地图



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
