




 广告
广告





















































自动驾驶测试场景库的构建及评价方法

1.引言
随着自动驾驶技术的快速发展,确保车辆在各种复杂交通环境中的安全性和可靠性成为业界关注的重点。国际标准化组织(ISO)发布的ISO 21448-2022《道路车辆—预期功能安全(SOTIF, Safety of The Intended Functionality)》标准[1],与国家标准GB/T 43267-2023《道路车辆—预期功能安全》[2],提出了一套全面的自动驾驶系统安全评估框架。其中,场景作为背景、动态要素、所有参与者和观察者的自我表征以及这些实体之间的关系的时序描述,是理解车辆运行环境及其运行性能表现的基本单元。为了实现对自动驾驶系统性能的全面评估,场景应包括常见的驾驶情况,也应涵盖边缘案例和极端条件下的行为。对此,构建一个全面且具有代表性的场景库是实现SOTIF目标的基础,同时,场景库中应具有充分的、多维的场景评价信息以支撑特定场景至SOTIF分析与验证之中。
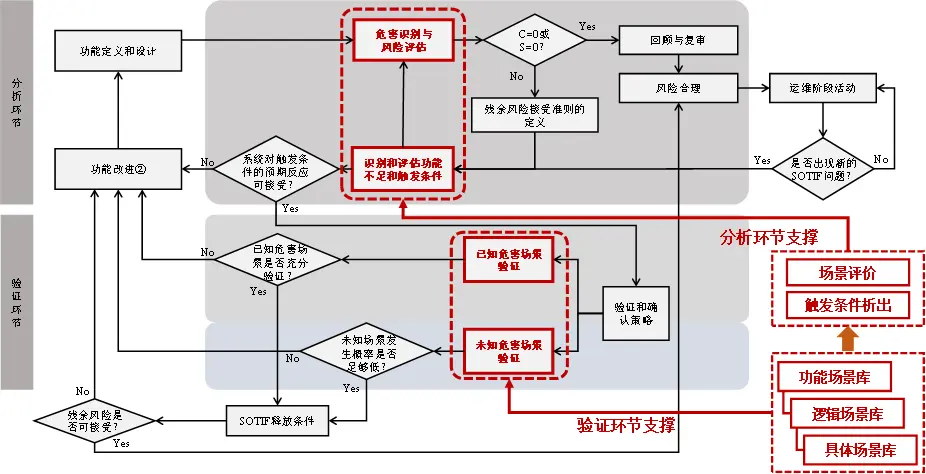
图1 场景库对SOTIF分析与验证的支撑关系
由图1可见,站在SOTIF分析与验证的角度,GB/T 43267-2023与ISO 21448-2022提供了以危害识别与风险评估、功能不足与触发条件识别、已知未知场景验证为核心流程的SOTIF活动方法论。站在开发与实践的角度,有效识别危害、功能不足、触发条件,以及执行测试验证的前提条件是具备一套充分且可用的危害、功能不足、触发条件与场景的数据库。对此,如何开发、构建一套可适配不同自动驾驶功能分析和测试用的数据库是最为核心的问题与挑战。因此,本文将介绍一种自动驾驶测试场景库的构建与评价方法以支撑SOTIF分析与SOTIF实践,以及该方法在工程实践中的应用。
2.场景的组成、架构与要素
GB/T 43267-2023与ISO 21448-2022中定义,场景是对多个场景快照(环境快照,包括背景、动态要素、所有参与者和观察者的自我表征以及这些实体之间的关系)的时间关系进行的描述,也包括行为与事件的语义或参数描述,即,场景快照是包罗万象的。根据场景的语义或参数描述的抽象与具体程度,自动化及测量系统标准协会(ASAM)在OpenSCENARIO将场景区分为功能场景、逻辑场景、与具体场景[3]。无论何种抽象程度,场景都可以被视作一系列的场景要素的组合。场景要素即场景的最小组成单元,可以被看作是描述特定交通环境的基本元素,且场景要素可以被赋予各自的类别归属与其他属性,场景的组成示意图如图2所示。

图2 场景的组成示意图
(来源:A test scenario automatic generation strategy for intelligent driving systems [4])
场景的要素可以是无穷多的,为了方便管理,需要基于一定的场景架构对其要素的类别进行定义。目前的场景结构化方法主要是基于层级的表述方法,如图3所示。尽管这些架构在层次划分上有所不同,但都遵循了从宏观分层到微观细化的通用原则来描述场景的宏观架构与微观要素。这些场景的层级化架构提供了一种结构化的场景拆解方法。比如,场景可以分为道路层、气候层、交通参与者层等描述层级,道路层可以细分为道路类型、道路材质、道路标识等,道路类型等,道路类型可以细分为高速路、城市快速路、十字路口等要素。
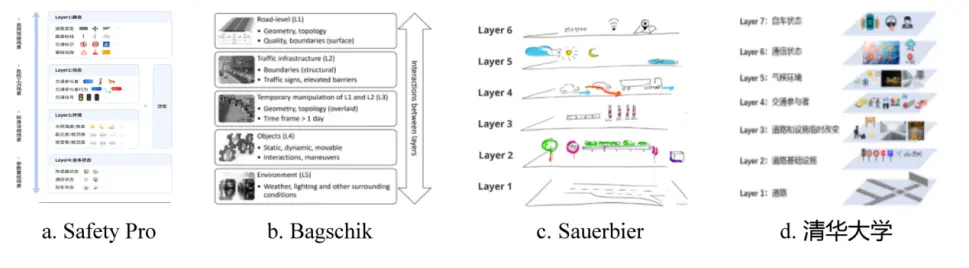
图3 场景架构(a. Safety Pro的场景架构;b. 学者Bagschik提出的场景架构 [5];c. 学者Bock提出的场景架构 [6];d. 清华大学提出的场景架构 [7])
基于场景的要素化与结构化描述,可以将场景拆解为带有属性标签的要素集合,以实现场景的精细描述。场景的拆解示意图如图4所示。

图4 场景的要素拆解







最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
