




 广告
广告





















































自动驾驶测试场景库的构建及评价方法

3.基于要素集笛卡尔积的场景库构建
场景要素集是构建自动驾驶测试场景库的前提。对大量的场景进行拆解后,基于专家、行业经验以及采集数据等,分类别地、尽可能充分地补充和归类每个场景层级的所属要素。为了结构化管理场景要素集,每一场景要素都具有特定的一级、二级标签,以及要素的类型(语义型或数值型)。其中,一级标签是基于场景多层架构的最顶层标签(如道路层,气候环境层等),一级标签下有若干个二级标签,二级标签为一级标签下的细分类别(如气候环境层的时段、雨、雪、雾等),二级标签下为具体要素(如时段:早晨、夜晚等;雨:具体雨量大小、突然降雨与雨量大小等);数值型的要素可根据需要进行均匀或基于概率分布的泛化。对要素进行分门别类后形成场景要素集,进一步对场景要素进行组合以构建场景库。二级标签决定不同要素之间是否可组,即,二级标签相同的要素不可组合,不同则可自由组合。具体,定义场景要素集为S,则有:

其中 为S的子集,S1是一类一级标签(比如道路级)相同的要素的集合,对此,有:
为S的子集,S1是一类一级标签(比如道路级)相同的要素的集合,对此,有:
其中 为S1的子集,S11是该一级标签(道路级)下二级标签(比如道路级的道路类型)相同的要素集合,S11可以进一步被分解,即
为S1的子集,S11是该一级标签(道路级)下二级标签(比如道路级的道路类型)相同的要素集合,S11可以进一步被分解,即

其中, 为具体的场景要素(
为具体的场景要素( 可以具象化示例为:高速路,城市快速路…十字路口)。
可以具象化示例为:高速路,城市快速路…十字路口)。
对此,一个场景 可以表示为:

进一步,一个基于场景要素的场景库 可以表示为:
可以表示为:

其中, 表示笛卡尔积。
表示笛卡尔积。
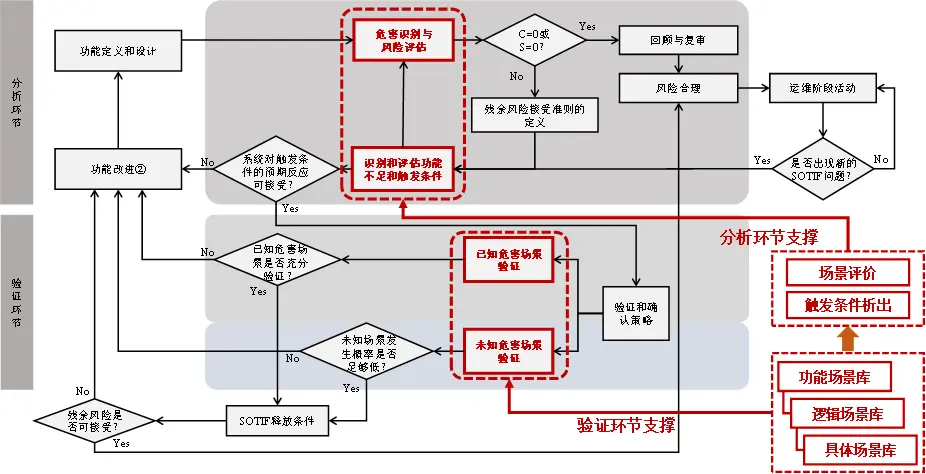
4. 场景库的场景评价
随着二级标签数量的增加,场景库的数量会呈现出指数级的增长。但是在自动驾驶预期功能安全的语境下,测试需要的是面向功能的、具备覆盖度和风险性的有限数量场景测试用例的集合。考虑到场景完全由要素组建而来,且在场景要素集的构建阶段已定义了相对全面的要素集合,所以可以认为,场景在某个维度的特征由特定的某个或某些场景要素决定。对此,本文提出了一种基于要素评价的继承式场景评价方法,对场景库中的场景进行出现频率、复杂程度和风险程度的评价以实现场景的筛选和测试用例子集的构建。
首先是对要素与场景频率程度 的评价。频率评价的目的在于对要素与其组成场景在现实世界的出现的可能性与出现次数的指数进行标注,要素的
的评价。频率评价的目的在于对要素与其组成场景在现实世界的出现的可能性与出现次数的指数进行标注,要素的 拟分为5个等级,即
拟分为5个等级,即 ,其中
,其中 为场景要素,数值分别表示极低频率到极高频率。评价策略为专家经验与行业经验以及采集数据等,对场景要素集中的所有要素进行
为场景要素,数值分别表示极低频率到极高频率。评价策略为专家经验与行业经验以及采集数据等,对场景要素集中的所有要素进行 评价后标注其频率等级。基于定性原则,场景的
评价后标注其频率等级。基于定性原则,场景的 继承其所有要素的频率量化值的最小值,即:
继承其所有要素的频率量化值的最小值,即:
此外,考虑到要素的组合会对其最终形成的场景的频率产生影响,需要对组合要素进行同等的频率评价。比如,道路类别-高速路的频率性评价为5,道路材质-土路的频率性评价为3,但二者组合后的场景描述为土路材质的高速路,该描述下的场景出现频率量化为3并不与现实相符。因此,需要对某些特定的组合进行联合标注,即 ,其中
,其中 为修正函数,进而,场景的
为修正函数,进而,场景的  应继承其所有要素频率和联合频率的最小值,如下式所示。
应继承其所有要素频率和联合频率的最小值,如下式所示。
要素与场景的风险性评价的目的在于:
1. 评价和标注要素与场景的风险性作为筛选和采样的量化参考;
2. 析出场景的潜在触发条件以衔接功能不足和SOTIF危害与危害行为分析。







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
