




 广告
广告





















































自动驾驶测试场景库的构建及评价方法
2024-09-25 17:06:29· 来源:赛目科技

要素的风险性 拟分为5个等级,即
拟分为5个等级,即 ,数值分别表示极低风险到极高风险。要素的
,数值分别表示极低风险到极高风险。要素的 可以直接关联到场景的潜在触发条件,根据ISO 21448-2022和GB/T 43267-2023中对触发条件和SOTIF因果模型的解释,某一场景中可能有多个要素具备作为触发条件的潜力,并有一定的可能性触发被测系统的特定功能不足后导致危害行为或无法防止、探测及减轻合理可预见的间接误用。故在场景的构建环节对场景中的潜在触发条件进行适当的析出是后续能够进行SOTIF分析的要求。基于定性原则,场景的风险性
可以直接关联到场景的潜在触发条件,根据ISO 21448-2022和GB/T 43267-2023中对触发条件和SOTIF因果模型的解释,某一场景中可能有多个要素具备作为触发条件的潜力,并有一定的可能性触发被测系统的特定功能不足后导致危害行为或无法防止、探测及减轻合理可预见的间接误用。故在场景的构建环节对场景中的潜在触发条件进行适当的析出是后续能够进行SOTIF分析的要求。基于定性原则,场景的风险性
拟分为5个等级,即,数值分别表示极低风险到极高风险。要素的可以直接关联到场景的潜在触发条件,根据ISO 21448-2022和GB/T 43267-2023中对触发条件和SOTIF因果模型的解释,某一场景中可能有多个要素具备作为触发条件的潜力,并有一定的可能性触发被测系统的特定功能不足后导致危害行为或无法防止、探测及减轻合理可预见的间接误用。故在场景的构建环节对场景中的潜在触发条件进行适当的析出是后续能够进行SOTIF分析的要求。基于定性原则,场景的风险性
 继承其所有要素的风险性的最大值,如下式所示。
继承其所有要素的风险性的最大值,如下式所示。

要素与场景的复杂性 可以为量化和标注要素与场景的复杂程度提供筛选的参考,并为采样特定量级的场景用例子集(颗粒度可控)提供支撑。前文提到,场景库要想支撑到测试的用途,其关键在于采样与筛选机制是否可以匹配自动驾驶功能的测试需求,而测试需求的关注点之一在于,如何在保证一定的覆盖性的前提下降低场景的量级。通过对要素进行
可以为量化和标注要素与场景的复杂程度提供筛选的参考,并为采样特定量级的场景用例子集(颗粒度可控)提供支撑。前文提到,场景库要想支撑到测试的用途,其关键在于采样与筛选机制是否可以匹配自动驾驶功能的测试需求,而测试需求的关注点之一在于,如何在保证一定的覆盖性的前提下降低场景的量级。通过对要素进行 特征标注可以避免采样和筛选时对相似的场景进行多次采样,以此来权衡场景的覆盖性与量级。要素的复杂性拟分为5个等级,即
特征标注可以避免采样和筛选时对相似的场景进行多次采样,以此来权衡场景的覆盖性与量级。要素的复杂性拟分为5个等级,即 ,数值分别表示不复杂到非常复杂。基于定性原则,场景的复杂性
,数值分别表示不复杂到非常复杂。基于定性原则,场景的复杂性 继承其所有要素的复杂性的平均值,此外,设定复杂要素数量指标,以阈值确定某一要素是否为复杂要素,并将复杂要素数量赋值给场景的复杂性评价结果,如下式所示:
继承其所有要素的复杂性的平均值,此外,设定复杂要素数量指标,以阈值确定某一要素是否为复杂要素,并将复杂要素数量赋值给场景的复杂性评价结果,如下式所示:
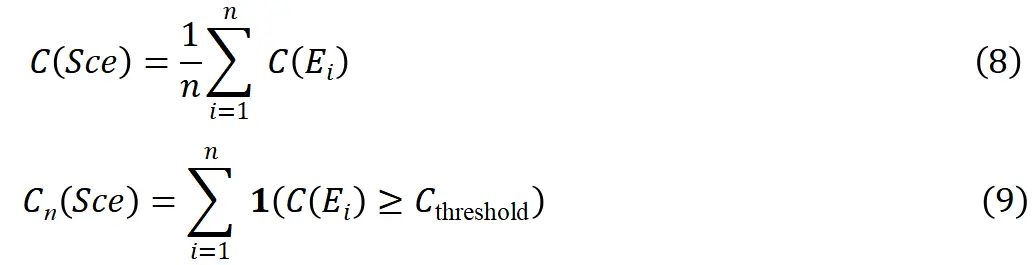
其中, 为指示函数,当条件成立时其值为1,否则为0。
为指示函数,当条件成立时其值为1,否则为0。







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
