




 广告
广告





















































利用线性结构对高度非线性的车辆动力学进行精确控制

编者按:漂移—一种以高侧滑角度操作车辆的技术—为在紧急情况下控制自动驾驶汽车提供了有趣的可能性。尽管漂移是一个高度动态的过程,涉及轮胎饱和与一个平衡不稳定的状态空间区域,但已证实自动驾驶汽车在此区域内仍能实现有效控制。过往用于漂移期间路径跟踪的控制方法依赖于非线性车辆模型。然而,证明了线性化模型能够捕捉到在漂移平衡周围大区域内进行控制的关键动力学特性。借助这一线性化模型,开发出了基于线性二次调节器的控制器。此控制器利用转向、油门及制动功能来追踪预设路径与所需速度曲线,实现系统的全面控制。通过在电动DMC DeLorean MARTY上部署该控制器,演示了线性化模型的保真度及其控制器的实际应用效果,路径跟踪精度超越先前工作,达到了厘米级的精确度。
本文译自:
《Exploiting Linear Structure for Precision Control of Highly Nonlinear Vehicle Dynamics》
文章来源:
IEEE Transactions on Intelligent Vehicles, vol. 8, no. 2, pp. 1852-1862, February. 2023
作者:
Marsie T. Peterson, Tushar Goel, and J. Christian Gerdes
作者单位:
作者供职于斯坦福大学机械工程系,地址:Stanford, CA 94305 USA(电子邮箱:mtrego@stanford.edu;tgoel@stanford.edu; gerdes@stanford.edu)
原文链接:
https://ieeexplore.ieee.org/document/9767674
摘要:漂移—以高侧滑角度操作车辆 - 为在紧急情况下控制自动驾驶汽车提供了有趣的可能性。虽然漂移是一个非常动态的过程,发生在轮胎饱和且平衡不稳定的状态空间区域,但自动驾驶汽车已经在该区域成功控制。以前在漂移时进行路径跟踪的控制方法依赖于非线性车辆模型。然而,在本文中,我们证明了线性化模型捕获了在漂移平衡周围的大区域中进行控制的必要动力学。使用这个线性化模型,我们开发了一个基于线性二次调节器的控制器。该控制器使用转向、油门和制动器来跟踪所需的路径和所需的速度曲线,使系统完全启动。我们通过在电动 DMC DeLorean MARTY 上实施该控制器,并以超过先前工作的厘米级精度准确跟踪平衡和准平衡路径,展示了该线性化模型的保真度和该控制器的实用性。
关键词:自动驾驶汽车,车辆动力学,鞍点,线性化,漂移,LQR
Ⅰ 引言
汽车绕过拐角的方式不止一种。通常,稳定转弯代表驾驶员将方向盘转向他们希望转动的方向的平衡状态。平衡由低转向角下的线性动力学定义,随着转向角的增加转变为非线性动力学,最终当一个车轴达到摩擦极限时变得不稳定或无法控制。一种不太传统的转弯方式,即漂移,代表了车辆在稳定转弯中的另一种可能的平衡条件。漂移涉及产生高侧滑角以保持后轮胎在其摩擦极限下运行,同时前轮胎反向转向以低于其摩擦极限运行。这会产生不稳定但可控的动态。
漂移对于低摩擦力和不确定的摩擦表面来说,这是一种有用的转弯方法。Tavernini 等人表明,对于低摩擦表面上的后轮驱动和全轮驱动车辆,漂移机动是驾驭发夹弯的最佳时间 [1],而 Berntorp 等人计算出,通过发夹转弯的最短时间机动将涉及 30 度或更多的侧滑在某些点。Velenis 等人表明,两种涉及漂移的拉力赛动作(林道制动和摆式转弯)是在低摩擦、越野路面上操纵某些弯道的时间最佳方式 [2]。特别是,他们发现越野制动漂移操作允许汽车离开弯道并快速恢复直线行驶,使驾驶员能够对不确定的道路和环境条件做出反应 [2]。Velenis 和 Tsiotras 发现,为了最大限度地提高出口速度,在弯道中导航的最佳轨迹包括在横向摩擦较小的情况下具有更大的侧滑角,从而产生与拉力赛车技术在质量上相似的轨迹 [3]。除了优化时间或出口速度外,Gray 等人还发现可以利用漂移机动来规划避障路径 [4]。
鉴于这种对障碍物和碰撞避让的适用性,一些研究人员已经开发出了使用现代非线性控制技术在漂移时跟踪路径的技术。Goh 等人开发了一种控制器,它使用转向和油门在漂移时跟踪路径 [5],将速度作为自由变量。Goel 等人开发了一种全驱动控制器,该控制器使用转向、油门和前制动器来跟踪漂移时的路径和速度曲线 [6]。这两个控制器都依赖于车辆动力学的非线性模型。在全尺寸车辆的实验中,这些控制器的均方根 (RMS) 横向路径跟踪误差分别为 18 cm [5] 和 42 cm [6]。然而,专业的拉力赛车手和漂移比赛车手似乎获得了更好的路径跟踪结果。拉力赛车手使用漂移机动来精确导航泥泞拉力赛赛道的不确定条件和能见度差,漂移比赛车手将他们的车辆与另一辆车或保险杠放在离墙壁仅几英寸的地方——同时保持非常高的侧滑角度。Keen 和 Cole 假设人类驾驶员使用线性模型来做出转向决策 [7],因此在车辆动力学高度非线性的状态空间中,采用非线性动力学的控制器的专业驾驶员表现优于控制器似乎令人惊讶。
转弯多重均衡的存在是运动方程非线性的直接结果。不同的模型预测了不同数量的均衡,Hindiyeh 和 Gerdes [8] 显示了由三态单轨车辆模型产生的三个不同的平衡,而 Edelmann 等人在双轨模型 [9] 中发现了四个。对应于漂移的均衡是不稳定的 [10],它们的线性表示包含不稳定的实特征值 [11]。Bárdos 等人通过实验表明,基于这种线性化模型的线性控制可以稳定漂移平衡周围飞行器的速度状态 [12]。
本文证明,车辆动力学可以被视为在平衡周围的大面积状态空间上呈线性。此外,即使平衡条件发生变化,特征结构也保持一致。因此,利用这种结构的线性技术不仅可以用于稳定速度状态,还可以用于跟踪轨迹。我们通过基于此线性模型开发控制器并在全尺寸测试平台 MARTY 上实现它来验证这一说法,如图 1 所示。该控制器使用线性技术来同时保持漂移平衡,并使用转向、油门和前制动器跟踪路径。通过利用底层线性结构,该线性控制器实现了超过以前文献中非线性控制器的路径跟踪性能。因此,利用自动驾驶汽车漂移的高度非线性动力学的关键是关注这些非线性方程可能掩盖的线性度。

图1. Marty 自主漂移。
本文章节如下:第Ⅱ部分介绍了用于分析的单轨车辆和轮胎模型。第 III部分描述了动力学的线性化,并演示了与平衡周围的非线性动力学的相似性。第 IV 部分介绍了可以利用这种线性度的平衡和路径跟踪线性二次调节器 (LQR) 控制器的开发。在 V 部分的全尺寸测试车辆上实施该控制器的实验结果表明,它能够跟踪恒定或可变曲率的路径,并且能够对调谐参数做出直接响应。第 VI 部分显示了跟踪性能如何超越以前发布的结果,第 VII 部分分享了结论和未来工作的方向。
Ⅱ 车辆建模
A. 单轨模型
单轨模型在模型复杂性和准确性之间取得了平衡。如图 2 所示,这个平面模型有三种状态:飞行器航向的速度、垂直于机体航向方向的速度、以及车辆的偏航角速率。该系统有三个输入:转向—建模为转向角,油门—建模为后轮胎上的力和前制动器—建模为前轮胎上的力。轮胎上的侧向力和由车辆状态和输入生成,如下所述。车辆参数包括质量、转动惯量、从质心到车辆前部和后部的距离和。使用单轨模型动力学建模如方程 (1)–(3) 所示。
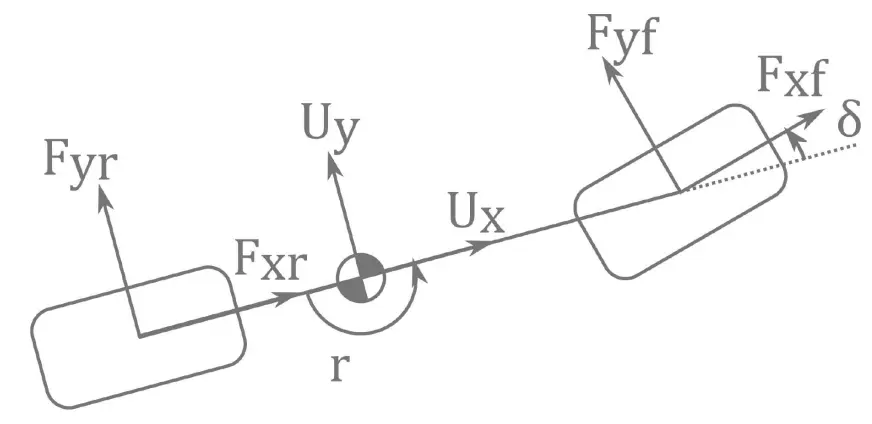
图2. 带输入的三态单轨模型。
B. 轮胎模型
Fiala 刷子模型 [8] 的修改版本用于模拟轮胎前后侧向力。轮胎力是车辆状态、输入和参数以及轮胎参数的函数:轮胎的转弯刚度和轮胎的摩擦系数。确定轮胎横向力的第一步是计算滑移角:轮胎中心线与轮胎行驶方向之间的夹角。
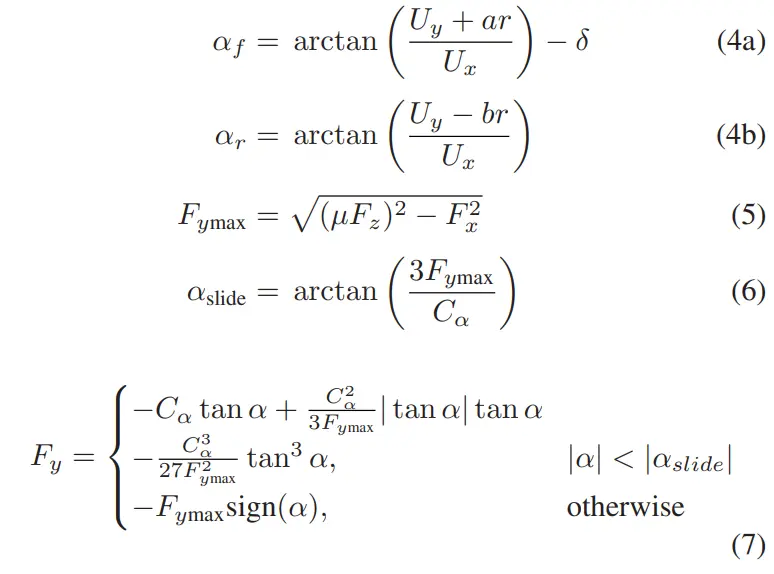
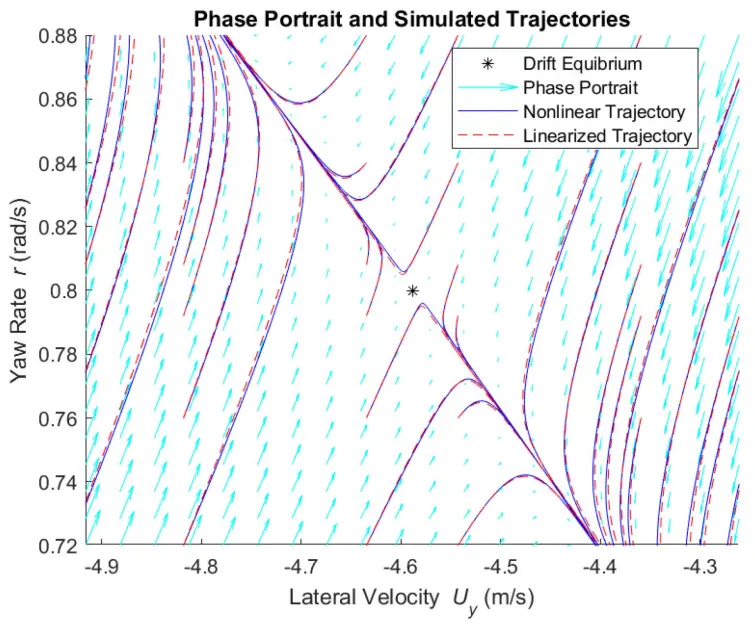
图3.带参考路径的单轨模型。



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
