




 广告
广告





















































基于结构化的Informer模型的自动驾驶轨迹预测

A.数据
下一代模拟(NGSIM)引用数据集[35]。本研究选取了NGSIM中加利福尼亚州洛杉矶US101高速公路地区的数据。US101高速公路区域长约640m,包含5条车道,第六条车道是数据收集区域内的匝道。这45分钟的数据分为三个15分钟的时段,即上午7:50至8:05、上午8:05至8:20和上午8:20至8:35。如图8所示,数据反映了交通拥堵的累积过程,包括高峰期的拥堵。数据集包含全局或局部车辆纵向、横向位置、车辆纵向速度、加速度、车辆类型、道路ID、车辆ID等,所有这些都是以10 Hz的频率收集的。局部坐标原点位于采集区域的左上角,轴表示车辆的横向位置,从道路的左侧延伸到右侧,轴表示车辆纵向位置,从采集区域的入口延伸到车辆的前方。
从数据集中采样目标车辆的轨迹,并根据构架ID、车辆ID和道路ID以及假设的自动驾驶车辆确定周围车辆。当前方或后方车辆与目标车辆之间的纵向距离超过时,这些车辆不被视为周围车辆,由以下方程式确定:

表 I 网格参数

其中,是目标车辆的车速,是车头时距,是最小安全距离。在式(45)中,考虑了车辆速度对跟车距离的影响,以便有效地确定周围车辆。每辆车的轨迹使用超过10s的视距进行采样,前5秒用于学习和理解,后5秒用于预测。特别地,为了训练目的,3s到5s的数据作为标记与6s到10的预测数据合并。过滤后得到48,675条符合条件的轨迹,其中随机选择38,940条合并到训练集,其余9,735条轨迹组成测试集。
根据式(6),选择数据集中的局部位置坐标作为车辆的位置特征。纵向速度和横向速度都是通过对位置坐标求导得到的,而不是使用数据中的原始纵向速度。同样,纵向和横向加速度都是通过对速度求导得到的。该标志是根据数据集中的车辆ID确定的。如果没有周边车辆,则采用0向量作为空白周边车辆的特征。
B.实施细节
我们在Python 3.7和Ubuntu 20.04环境下使用Pytorch-1.8框架在单个GeForce RTX 3070 GPU上训练模型。Informer结构的参数如表1所示,使用Adam优化器训练网络500次。
C.试验设计
通过以下两个评估指标,基于预测精度和时间成本来评估网络的性能。
轨迹预测误差:在1s、2s、3s、4s和5s的预测时间内,最终预测位置与地面真实值之间的绝对相对误差,称为最终位置误差(FPE);在1s、2s、3s、4s和5s的预测范围内,预测位置与地面真实值之间的平均相对误差,称为平均位置误差(APE)。
时间成本:训练过程中每一次优化权重的时间,以及输入测试数据时网络的预测时间。为了说明网络的性能,我们使用以下典型方法进行比较。
结构化的Informer。本文提出的基于结构化的Informer的轨迹预测方法能够学习目标车辆的历史轨迹以及并联车辆之间的相互作用信息,最终在长序列时间序列预测中生成目标车辆的预测轨迹。
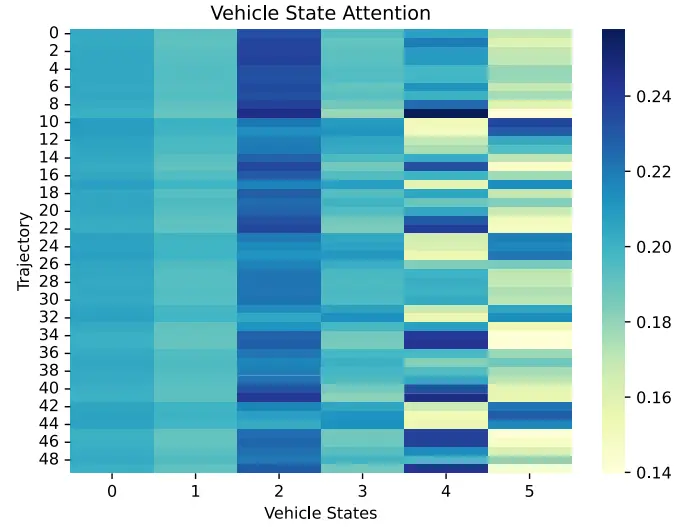
图 9 车辆-状态注意力
结构化的Transformer[27]。采用以编码器-解码器为体系结构的规范结构化Transformer模型,在预测未来轨迹时还可以并行计算输入轨迹的注意力。
结构性长短期存储器[8]。使用长短期存储器构建了一个两层编码器-解码器来处理六辆车的轨迹,目的是为了能够预测它们的相互作用轨迹。
双向长短期存储器[21]。并行使用两个双向长短期存储器,对目标车辆的历史轨迹和车辆的预测变道意图进行编码。第三个双向长短期存储器用作解码器,以输出预测的轨迹。
两个长短期存储器[24]。仅使用一个长短期存储器来预测车辆变道意图,而另一个长短期存储器基于变道意图生成预测轨迹。
单个长短期存储器[23]。采用简单的长短期存储器,利用车辆历史轨迹生成车辆预测轨迹。
Ⅳ 试验与结果分析
A.注意力机制分析
1)Informer-车辆-状态-注意力: 图9显示了目标车辆在结构化Informer中特定历史轨迹的车辆-状态-注意力分布。垂直轴表示车辆轨迹节点,而水平轴的范围为0到5,分别表示车辆的纵向位置坐标、横向位置坐标、纵向速度、横向速度、纵向加速度和横向加速度,如式(6)中所定义。图上的每个点对应于为每个轨迹节点分配给车辆状态的注意力值。图10显示了轨迹的部分车辆-状态曲线。注意力值的分布表明,随着车辆轨迹的变化,注意力机制分配给车辆状态的权重不是恒定的。从这两个图中可以看出,横向速度值相对小于纵向速度值,车辆的横向位移随时间的推移并不显著,导致车辆-状态-注意力机制始终将更多的注意力放在纵向速度上。加速度的注意力机制只集中在加速度变化的某些关键点上。注意力分布随着相应的纵向和横向加速度的变化而反复变化。同样,纵向加速度在某些特征点上比横向加速度获得更大的注意力值。速度和加速度的注意力分布证实了对车辆纵向运动给予更多的注意力会提高车辆此时预测的准确性。研究结果表明,所提出的车辆-状态-注意力机制可以根据车辆状态的变化动态调节注意力分布,以强调更关键的状态变量,从而提高了预测精度并提高了网络的解释能力。
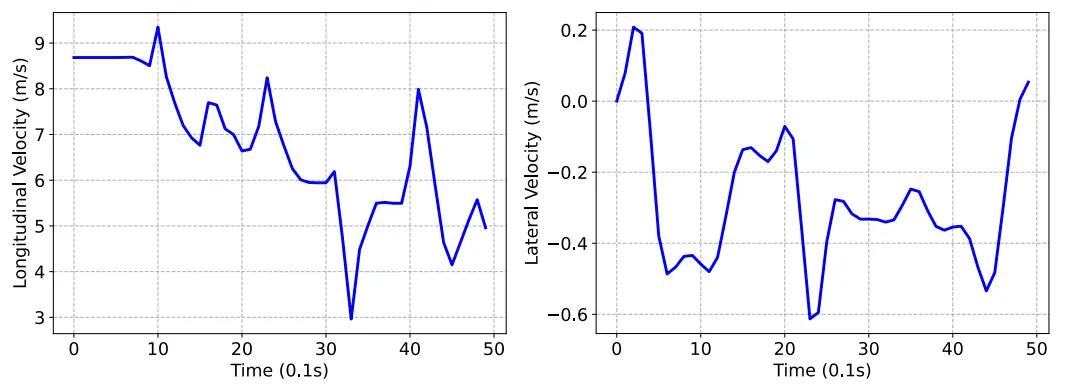
a)纵向速度; b)横向速度
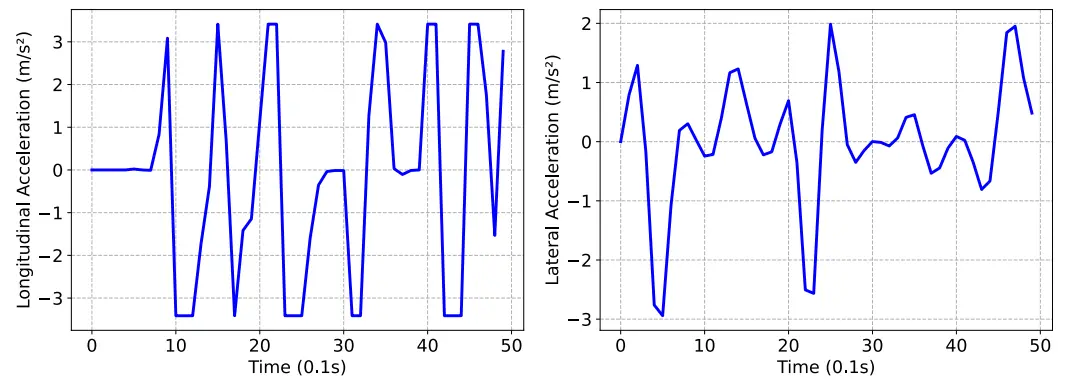
c)纵向加速度; d)横向加速度
图 10 历史轨迹的车辆-状态曲线







最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
