




 广告
广告





















































基于结构化的Informer模型的自动驾驶轨迹预测

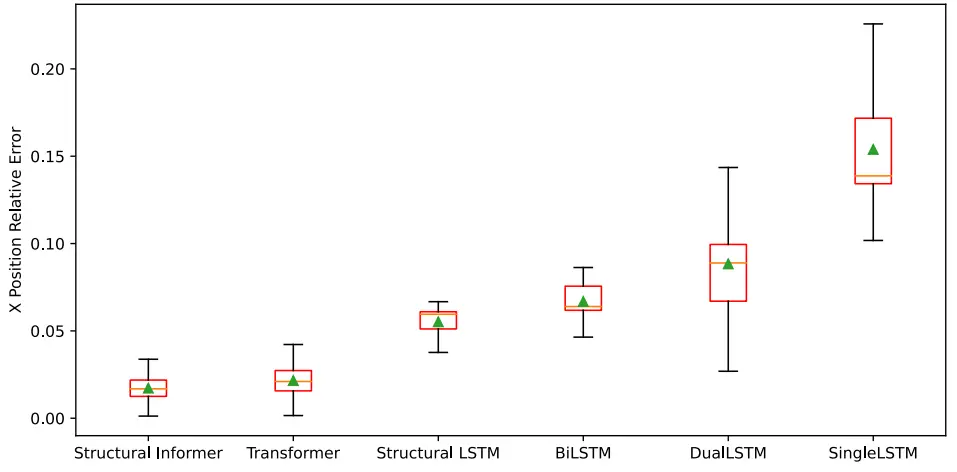
图 14 纵向最终位置误差分布
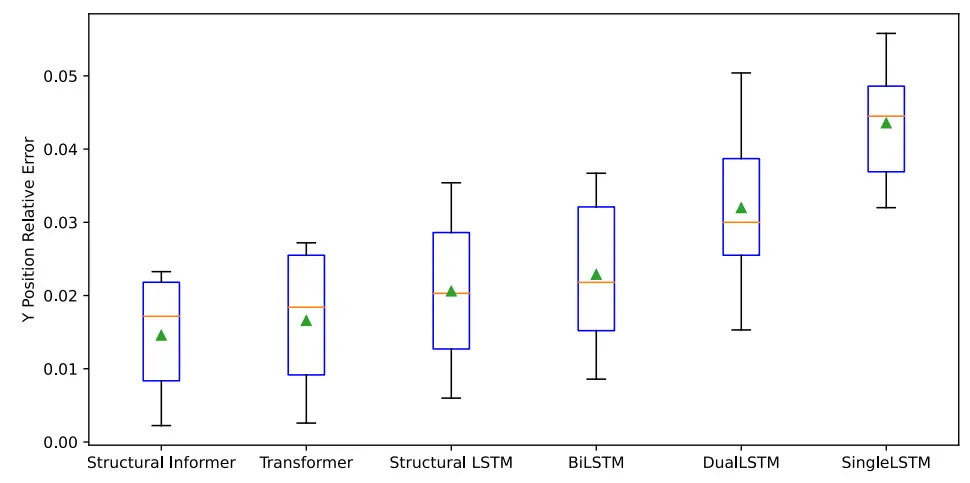
图 15 横向最终位置误差分布
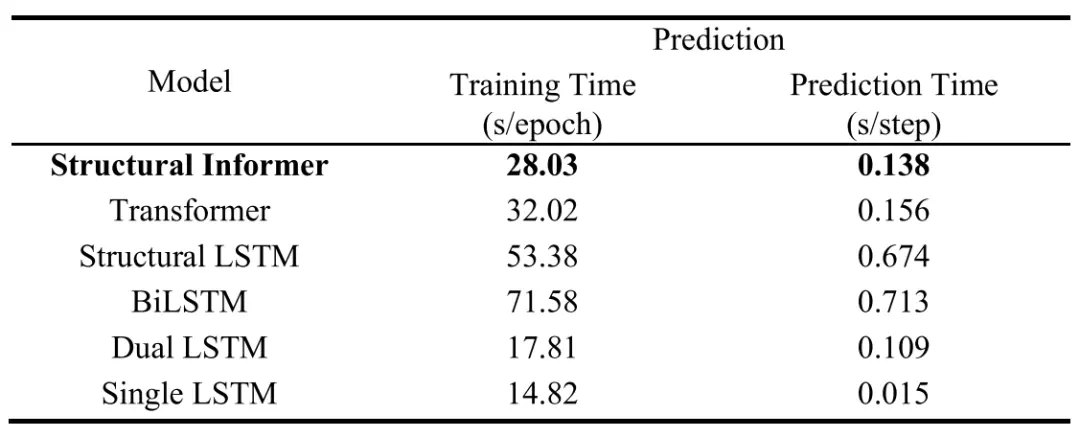
C.轨迹预测时间成本分析
表IV给出了结构化Informer模型和参考模型的时间成本结果,其中包括每个时期的训练时间和每个步骤的预测时间。由于采用了多头ProbSparse自注意机制和注意力蒸馏机制,结构化Informer在训练时间和预测时间方面优于Transformer。此外,与BiLSTM和结构化LSTM相比,由于LSTM中顺序传递的特性,使用LSTM形成编码器-解码器架构更耗时,结构化Informer的并行计算机制提高了计算效率。相反,双LSTM和单LSTM具有更简单的网络结构,以及最低的时间成本,但是它们不能保证LSTF中的预测精度,因为它们不能提取历史和未来轨迹的更多特征。因此,本文提出的结构化Informer模型不仅保证了预测精度,而且在LSTF中实现了较低的时间成本。
表 IV 时间成本
Ⅴ 结论
本文介绍了结构化的Informer网络,一种基于Transformer的架构,它可以预测LSTF中自动驾驶中TVs的轨迹。提出了一种车辆状态注意机制,以考虑每个状态变化对TV未来轨迹的影响。与传统的Transformer相比,新的多头ProbSparse自注意机制降低了网络的时间复杂度。此外,注意力蒸馏机制被用来降低网络在编码器-解码器堆叠过程中的空间复杂度。NGSIM数据集上的实验评估表明,结构化的Informer网络在LSTF中对TV的纵向和横向轨迹产生较低的误差和稳定的预测,同时在每个训练和预测步骤上花费更少的时间。虽然验证只在高速公路的情况下,由于有限的数据可用性,所提出的模型预计将在其他情况下表现良好。结果表明,结构化Informer网络在车辆的长期预测(最长5秒)方面具有可靠和出色的性能,为无人驾驶汽车的运动规划提供了一种很有前途的SV轨迹预测解决方案。
参考文献







最新资讯
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
-
博世发布突破性电解槽技术
2025-04-02 20:23
-
ESI 全新BM-Stamp软件在汽车行业冲压仿真精
2025-04-02 09:27
-
车辆软件测试工程师的工作内容---解读GBT德
2025-04-02 08:41
-
浅谈机动车检测行业合规经营与检验人员职业
2025-04-02 08:40
