




 广告
广告





















































智驾仿真测试实战之自动泊车HiL仿真测试
2024-10-09 10:44:22· 来源:北汇信息

引言汽车进入智能化时代,自动泊车功能已成为标配。在研发测试阶段,实车测试面临测试场景覆盖度不足、效率低下和成本高昂等挑战。为解决这些问题,本文提出一种自动泊车HiL仿真测试系统方案,可大幅度提升测试效率及测试场景覆盖度、缩短测试周期、加速产品迭代升级。
自动泊车系统简介多传感器融合的自动泊车技术结合了超声波雷达和摄像头来实现车位探测和环境感知。超声波雷达通过实时探测周围障碍物的距离,结合车辆自身的长宽,判断是否存在可泊入的空间车位,而摄像头则通过实时图像识别来检测划线车位及其周围环境。传感器的协同工作使自动泊车系统能够精确识别车位、实现精准停车,并确保停车过程中的安全性。

图1 自动泊车示意图
自动泊车HiL仿真测试系统
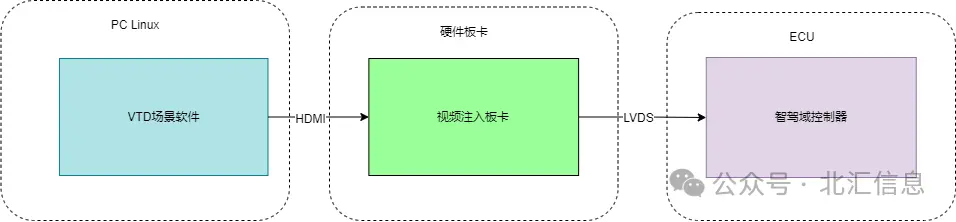
图2 自动泊车 hil测试系统框图自动泊车HiL仿真测试系统框架如上图2所示,结合场景仿真软件(VTD)、动力学仿真软件(DYNA4)、实验管理软件(CANoe)和HiL硬件平台,进行整车通信网络仿真、4路环视摄像头仿真和12路超声波雷达仿真,实现自动泊车功能的闭环测试。
3.1整车通信网络仿真使用CANoe对智驾域控制器交互系统进行虚拟节点仿真,如转向系统、制动系统、组合惯导INS、驾驶员操作指令等。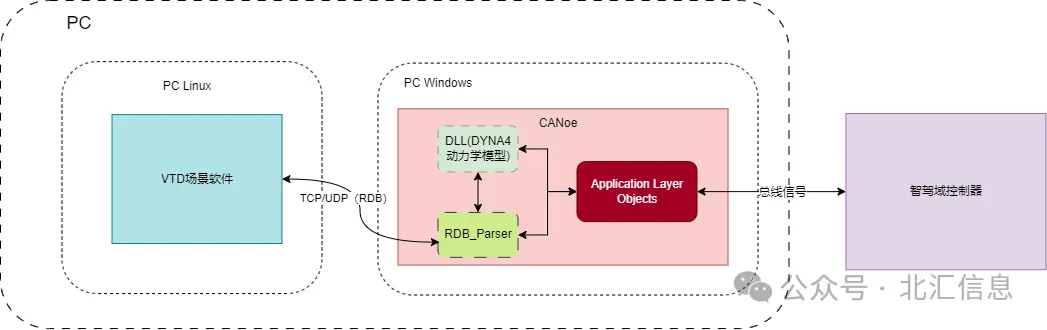
图3 整车通信网络数据流程图







最新资讯
-
曼恩和ABB成功测试基于以太网通信的电动重
2025-04-21 21:18
-
一文讲述汽车电子电气EEA架构
2025-04-21 20:58
-
中汽中心受邀参加中国消费品质量安全提升系
2025-04-21 20:57
-
标准解读 | 新版动力电池安全强标解读
2025-04-21 20:56
-
标准解读丨深圳地标《智能网联汽车自动驾驶
2025-04-21 20:54
