




 广告
广告





















































中国智能网联汽车技术规程(C-ICAP-2024版)之基础行车辅助测试介绍及文档分享24年7月1号实施

系统激活后,试验车辆设置车速为 40km/h,在距离电动二轮车行驶轨迹 100m 前达到预期车速,并匀速向前行驶。电动二轮车以 20km/h 的速度匀速行驶,预计碰撞点在道路正中间。
(3)试验退出条件
当满足下列条件时,试验退出:
1) 单次试验,试验车辆与电动二轮车发生碰撞或避免碰撞,则该单次测试结束。
2) 发生碰撞时,试验车辆车速降低量小于 5km/h,则该测试项目测试结束
目标物纵向移动
(1)测试场景
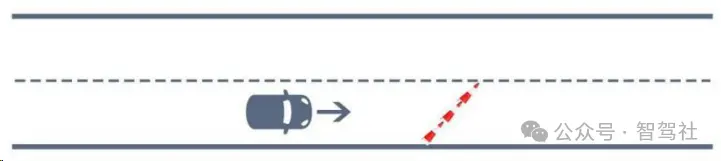
测试道路为至少包含一条车道的长直道,试验车辆驶向前方慢行行人。如图所示。

(2)测试方法
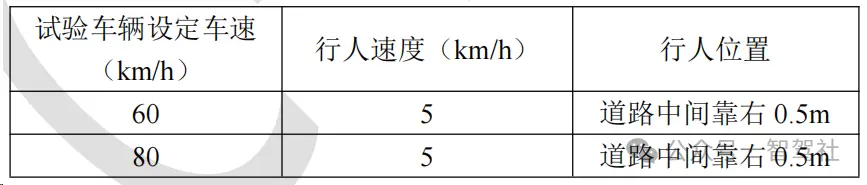
系统激活后,设定车速由低到高依次进行试验。试验车辆在距离目标物 200m 前达到预期车速,并以稳定状态驶向前方慢行行人,驾驶员双手握住方向盘,不得干扰系统的正常驾驶。试验车辆设定车速及行人位置如表所示。
(3)试验退出条件
当满足下列条件时,试验退出:
1)单次试验,试验车辆与行人发生碰撞或避免碰撞,则该单次测试结束。
2)发生碰撞时,试验车辆车速降低量小于 5km/h 或试验车辆速度大于 50km/h,则该测试项目测试结果为碰撞。
3)某测试项目测试结果为碰撞,则不再进行后续测试项目
事故车辆识别与响应
(1)测试场景
测试道路为至少包含两条车道的长直道,在车道中间横置静止的目标车辆作为障碍物,试验车辆匀速驶向前方障碍物。如图所示。

(2)测试方法
系统激活后,试验车辆设置车速分为 60km/h,在距离目标物 200m 前达到预期车速,
并匀速驶向障碍物。
(3)试验退出条件
当满足下列条件时,试验退出:
1) 单次试验,试验车辆与车辆发生碰撞或避免碰撞,则该单次测试结束。
2) 发生碰撞时,试验车辆车速降低量小于 5km/h 或试验车辆速度大于 50km/h,则该测试项目测试结束。
道路施工
锥桶识别与响应
(1)测试场景
测试道路为至少包含两条车道的长直道,在车道中间放置倾斜于道路方向 45°夹角的 5个锥形交通路标(推荐尺寸:50cm×35cm)作为障碍物,试验车辆匀速驶向前方障碍物。如图所示。
(2)测试方法
系统激活后,试验车辆设置车速为 60km/h,在距离目标物 200m 前达到预期车速,并匀速驶向障碍物。
(3)试验退出条件
当满足下列条件时,试验退出:
1) 单次试验,试验车辆与障碍物发生碰撞或避免碰撞,则该单次测试结束。
2) 发生碰撞时,试验车辆车速降低量小于 5km/h,则该测试项目测试结束。
模拟危险场景
仿真测试实施机构及测试方法
仿真测试实施由企业自主完成或委托第三方检测认证机构开展,具体实施形式由企业结合自身情况合理选择。为保证结果的公平、公正,无论企业选择何种方式,均需由试验人员对实施测试的环境进行现场或远程审核。作为评分前提,若发现提交的报告与实际测试环境不符,则取消此次车型的仿真评分资格。
测试方法应结合实际情况进行灵活选择,包括但不限于硬件在环(HIL)、整车在环(VIL),此处推荐使用物理级传感器信号仿真设备来提高仿真的测试精度,如视频暗箱、视频注入、毫米波雷达回波模拟器、超声波雷达回波模拟器等。
- 下一篇:汽车可靠性试验-盐雾试验解析
- 上一篇:亚马逊云科技生成式 AI 认证正式上线!



编辑推荐




最新资讯
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
