




 广告
广告





















































自动驾驶从小白到小强46~刹车防抱死系统ABS

1.为什么需要刹车防抱死
2.防抱死系统ABS的工作原理
3.R13H法规对ABS的试验要求
1.为什么需要刹车防抱死
父亲是一名开大车的老司机,有一天闲聊时他说:“在紧急制动时快速踩下利车踏板,然后松开、再踩下、再松开,要比一直踩着刹车踏板制动效果好。”问他为什么会这样时,他却不知道。工作后才知道不断松、踩刹车踏板是为了“防止刹车抱死”。
剎车抱死是指刹车系统在紧急制动时,车轮完全停止转动,导致车辆失去操控性。
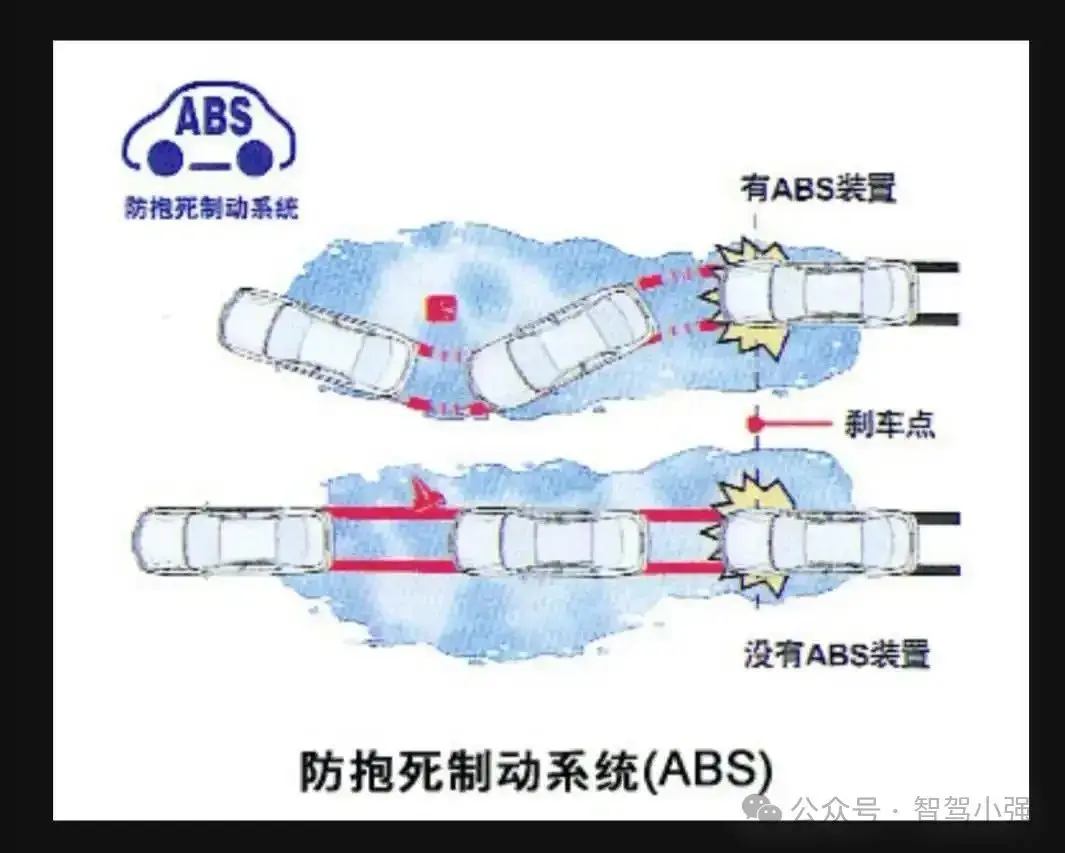
刹车抱死会降低车辆的制动性能,刹车抱死会使车轮失去滚动能力,从而降低轮胎与地面的摩擦力。
这种滑动摩擦的制动效果远不如滚动摩擦,因此会导致制动距离延长,使车辆更难在短距离内停下来。
车轮抱死后,车辆容易失去控制,尤其是在高速或湿滑路面上。此时,车辆的前轮或后轮可能会因为抱死而失去转向能力或稳定性,导致车辆出现侧滑、甩尾等危险现象。这些现象会使车辆偏离原本的行驶轨迹,增加与其他车辆或障碍物碰撞的风险。
强行拖拉抱死的车轮会对轮胎、制动鼓等部件造成严重的磨损和损坏。这不仅会增加车辆的维护成本,还可能影响车辆的整体性能和安全性。
剎车抱死会严重威胁驾驶者和乘客的生命安全。在紧急制动情况下,如果车轮抱死,驾驶员将很难控制车辆的方向和速度,从而增加交通事故的风险。此外,刹车抱死还可能导致轮胎在强烈的摩擦下爆胎,进一步加剧事故的严重性。
剎车抱死导致轮胎局部与地面拖滑,会大大降低轮胎的使用寿命。这不仅增加了更换轮胎的频率和成本,还可能影响车辆的行驶稳定性和操控性。
紧急制动时刹车抱死是一种极其危险的情况,需要驾驶员立即采取措施进行处理。为了避免刹车抱死的发生,驾驶员应定期检查刹车系统,确保刹车片、刹车盘等部件处于良好状态。
同时,在紧急制动时,驾驶员应合理使用刹车力度,避免车轮完全停止转动。对于配备刹车防抱死系统ABS (Anti-lock BrakeSystem)的车辆,驾驶员应了解其工作原理和操作方法,以便在紧急情况下正确使用该系统来提高行车安全性。
2.防抱死系统ABS的工作原理
乘用车ABS系统主要由以下几部分组成:
(a)轮速传感器:安装在车轮上,用于监测车轮的转速,并将信号传递给ECU;
(b)ECU(电子控制单元):负责接收传感器信号并进行分析,以及发出指令给制动压力调节器;
(c)制动压力调节器:根据ECU的指令,动态调整车轮制动缸的油压,从而改变制动力矩; (d)液压制动系统:包括刹车踏板、刹车油壶、刹车油管等,用于传递制动力。
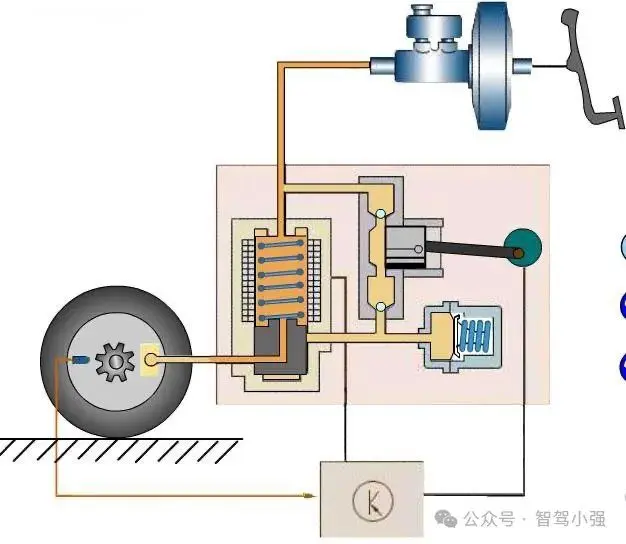
刹车防抱死系统ABS的工作原理主要是:利用装在车辆刹车系统上的传感器来感知刹车时车轮的运动状态,并通过电子控制器和制动压力调节器来动态调整制动力,确保车轮不被抱死,从而提高制动效果和行车安全性。具体工作流程如下:
(a)系统自检:每次车辆起动和加速超过一定速度(如10km/h)时,ABS系统会自动进行周期自检,以确定其正常工作。驾驶员可能会听到细微的咔嗒声和一些马达的噪音,这是正常现象。 (b)监测车轮转速:当车辆紧急制动时,轮速传感器会实时监测车轮的转速,并将信号传递给ECU。
(c)分析并发出指令:ECU会对接收到的信号进行分析,当判断车轮将要抱死时(即车轮转速迅速降低并接近停止转动),会立即发出指令给制动压力调节器。 (d)调整制动力:制动压力调节器会根据ECU的指令,迅速降低该车轮制动缸的油压,从而减小制动力矩,使车轮恢复转动。经过一段时间后,再恢复原有的油压,如此循环往复(每秒可达5~10次或更多),以保持车轮始终处于转动状态而又有最大的制动力矩。
当你猛踩刹车时,车轮上传出的“哒哒哒哒”声,通常就是ABS激活导致的声音。 虽然ABS系统能够提高行车安全性,但驾驶员在紧急制动时仍需将制动踏板踩到底,以激活ABS系统。同时,在结冰、积水等湿滑的路面行车时,应降低车速,不可盲目迷信ABS装置。
3.R13H法规对ABS的试验要求
UN ECE R13H是欧美日韩等国家广泛认可的M1类乘用车制动要求的统一规定。
R13H法规附件6定义了装有防抱死系统的车辆的试验要求,详情如下:
1 综述
1.1 本附件定义了装有防抱死系统的道路车辆所需的,制动性能。 1.2 目前已知的防抱死系统包括一个或多个传感器、一个或多个控制器和一个或多个调节器。任何末来可能引入的不同设计的装置,或者防抱死制动功能集成到另一个系统中的装置,如果其性能等于本附件规定的性能,则应被视为本附件所指的防抱死制动系统。
2 定义
2.1 “防抱死系统anti-lock system”是行车制动系统的一部分,它在制动过程中自动控制车辆一个或多个车轮在车轮旋转方向上的打滑程度。
2.2 “传感器Sensor”是指设计用于识别车轮旋转状态或车辆运动状态并将其传输给控制器的部件。
2.3 “控制器Controller”是指设计用于评估传感器传输的数据并将信号传输到调节器的组件。
2.4 “调节器Modulator”是指根据从控制器接收的信号改变制动力的部件。
2.5 “直接控制车轮Directly controlled wheer”是指其制动力根据至少由其自身传感器提供的数据进行调节的车轮。
2.6 “间接控制车轮Indirectly controlled wheer”是指其制动力根据其他车轮的传感器提供的数据进行调节的车轮。
2.7 “全循环Full cycling”是指防抱死系统在反复调节制动力,以防止直接控制的车轮锁死,在停车时调节只发生一次的制动应用不应被认为符合这一定义。
选择高控制的防抱死系统被认为包括直接和间接控制的车轮;选择低控制的系统中,所有感测到的车轮都被视为直接控制的车轮。
3 防抱死系统的类型
3.1 如果车辆安装了以下系统之一,则车辆被视为配备了本法规所指的防抱死系统:
3.1.1 第1类防抱死系统
配备1类防抱死系统的车辆应符合本附件的所有要求。
3.1.2 第2类防抱死系统
配备第2类防抱死系统的车辆应符合本附件的所有要求,但下文第5.3.5段的要求除外。
3.1.3 第3类防抱死系统 配备有第3类防抱死系统的车辆应满足本附件的所有要求,下文第5.3.4和5.3.5段除外。在这些车辆上,任何不包括至少一个直接控制车轮的单独车轴应满足本法规附件5的附着力利用条件和车轮锁定顺序,而不是本附件第5.2段规定的附着力利用要求。







最新资讯
-
每秒采集100万个数据 | 下一代USB DAQ产品-
2025-04-07 14:12
-
重型商用车辆和客车的动力学——振动环境
2025-04-07 14:11
-
2025年10大隐形车衣品牌排行榜
2025-04-07 10:40
-
沃尔沃卡车与Greenlane合作推动商业电动化
2025-04-07 08:42
-
江铃晶马:美标转欧标充电结构专利
2025-04-07 08:39
