




 广告
广告





















































从感知、规划来看特斯拉 FSD自动驾驶为何全球瑶瑶领先
2024-10-13 07:25:13· 来源:智驾社

效率、安全和舒适是自动驾驶规划的三大目标 非凸性和高维性是自动驾驶规划的两大难点
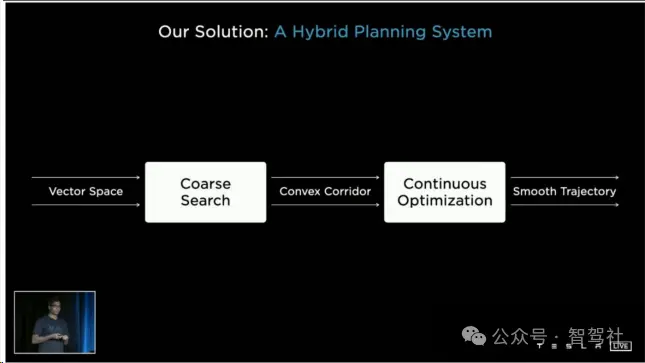 特斯拉将规划问题进行分层分解
特斯拉将规划问题进行分层分解
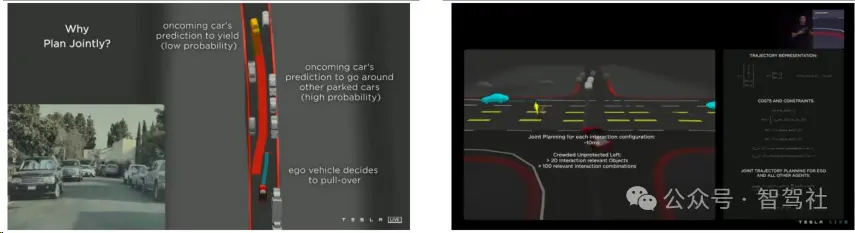 自动驾驶系统需要实现多代理联合轨迹规划 自动驾驶行驶方案评估至少需要 10 毫秒
自动驾驶系统需要实现多代理联合轨迹规划 自动驾驶行驶方案评估至少需要 10 毫秒
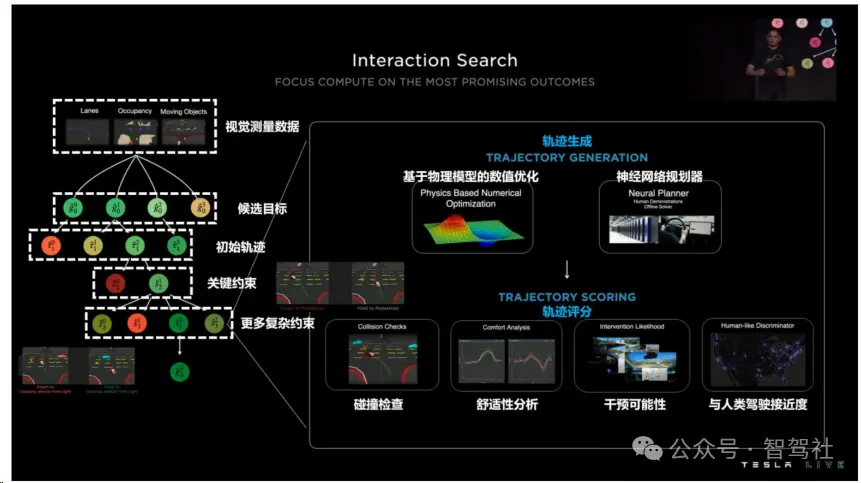
特斯拉的自动驾驶规划系统通过采用交互搜索框架,实现了对多种可能行驶轨迹的快速评估和优化。这一系统的工作流程主要分为两个阶段:
首先,系统通过收集车道、障碍物和周围移动物体的视觉测量数据,这些数据被转化为稀疏抽象和潜在特征。利用这些信息,系统生成一组候选目标,并使用经典优化方法与神经网络规划器来创建初始轨迹。这一阶段,特斯拉的神经网络快速识别出3D空间中代理(即车辆或物体)的位置,并从这些位置提取张量,结合车辆速度、方向等其他数据,进行后续处理。
其次,系统采用递增式的方法,在关键约束的基础上,不断加入新的约束条件,利用较少约束下的最优解作为初值,逐步求解更复杂的优化问题。特斯拉还构建了轻量级可查询网络,该网络由人类驾驶数据与宽松时间限制下的计算数据进行训练,能够在100微秒内对规划轨迹进行评分,显著提升规划效率。
在决策过程中,特斯拉主要从四个方面对规划轨迹进行评分和决策树剪枝:1)碰撞检查,确保路径安全;2)舒适性分析,评估乘客体验;3)干预可能性,评估候选路径导致人工接管的概率;4)与人类驾驶接近度,基于人类驾驶数据,评估候选路径与人类驾驶员行为的接近程度。通过这种综合评估,特斯拉规划系统能够高效地筛选出最优路径,优化自动驾驶的决策过程。







最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
