




 广告
广告





















































汽车侧镜基座气动噪声优化

本工作采用了Scale Adaptive Simulation粘性模型和多面体网格。在本研究中,我们将重点放在外窗上,以比较相同场景下的不同角度位置。将反射镜和底座设置为源,在车侧放置13台接收机采集数据(图4)。
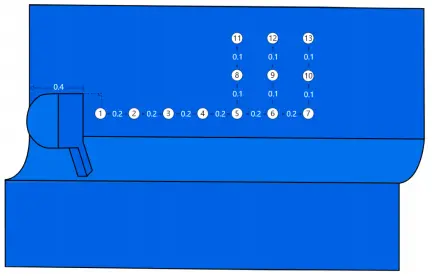
图4 车辆一侧的位置
为了准确地捕捉湍流气流与侧镜相互作用后的声学值,需要一个随时间变化的瞬态模型。然而,对于气动力,当模拟达到稳态时,稳态时间解可以输出值。在本文中,瞬态和稳态模型分别用于输出所需的声学值和气动力。
假设气流速度为40 m/s,且存在涡旋,模拟运行至0.0825 s。网格细化过程对于获得准确的结果至关重要,因为它代表了所研究部件的尺寸,其中计算了每个元件在入口和出口的压力和速度分量。在这项工作中,首先应用ANSYS自动网格生成器,然后通过试错法不断减小网格基尺寸,直到达到恒定的输出。残差的期望值由用户设置,求解器继续求解,直到达到设置的迭代次数或残差值。精细的网格可以获得更精确的结果,但也可能导致较长的计算时间。相反,较大的网格大小将产生不准确的结果。
在网格细化过程中,ANSYS Fluent首先生成一个自动网格,并运行求解器,记录结果。然后采用网格定尺法,取镜面和侧体表面,取50 mm的单元尺寸,然后以5 mm的步长不断减小到10 mm。在网格细化过程的每一步,都运行求解器,并记录数据。图5显示的结果在7n范围内,因此在较小的300×103及以上网格尺寸下结果是准确的。由于阻力的数值与声学有关,因此对阻力的模拟是充分的。
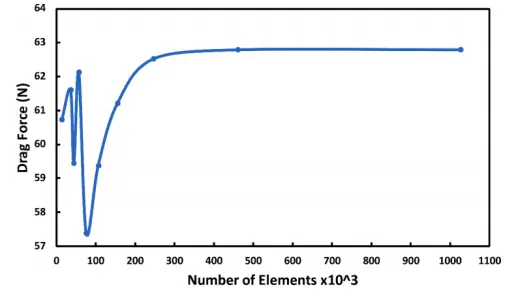
图5 网格无关性验证
在设置阶段,网格切换到多面体,从而改变网格尺寸,如表1所示。表2显示了ANSYS fluent设置中使用的方法。使用的网格分为9个区域,共351,555个节点。图6显示了案例研究中使用的网格,包括边缘、面和分区。图6中紫色表面为入口,红色表面为出口,灰色部分为后视镜和汽车表面,绿色为研究区域的边界。
表1 多面体网格分析和尺寸
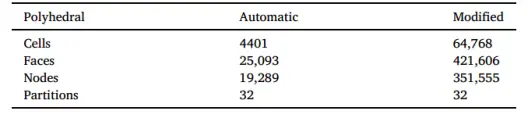
表2 ANSYS中流动策略
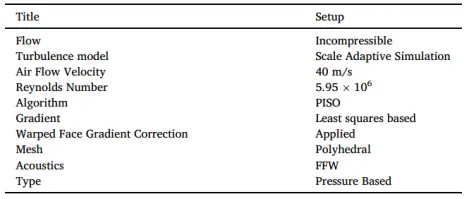
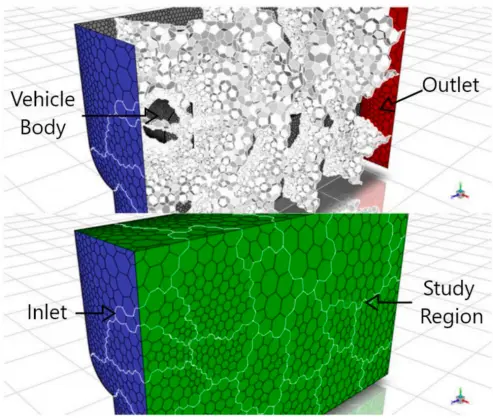
图6 网格显示,没有外部边界(上),有边界(下)
04 结果与分析
瞬态仿真得到的结果为气动声学值,稳态仿真得到的结果为气动力值。结果由ANSYS求解器输出并呈现,以便得出侧镜基座方向的特定值,该值可产生最小的噪声和空气动力。由于采用傅里叶变换,数据数值较为混乱。因此,在研究的26个案例中,采用了几种方法来确定最佳的基底角位置。例如,由于傅里叶变换产生与频率相关的参数,并且就声音而言,低频声压级的大小比高频噪声级的大小更重要。频率范围是1 - 1000HZ的声音可以被人耳捕捉;此外,5到13号的接收器更重要,因为它们离驾驶员的耳朵更近。
图7为傅立叶级数曲线,为了更好地理解数据并能够输出结果,为每条线获得一个四阶多项式(图8)。通过取曲线开始处的值,选择多项式的阶数作为最精确的表示。例如,在78.75◦在接收器10的原始结果开始在77.4 dB,当应用多项式,初始值如下:二阶71dB,三阶74dB,四阶76dB,五阶80dB,六阶是82dB分贝。这表明第四阶是最准确的表示,因为获得的值最接近原始起始值(误差1.8%)。数据从10 Hz开始到910 Hz,但由于未发展的流动分离区域,前100 Hz以及最后10 Hz被删除。
得到的结果显示声压级几乎达到100 dB(图7),这对读者来说可能是一个很大的值,但事实并非如此。虽然声压级是以分贝来测量的,但它不同于同样以分贝来测量的声幅。然而,如果声音振幅达到85dB以上,可能会对人类的耳朵造成永久性损伤。
数据显示,接收器1(图7)录得最高声压级值(接近100 dB),因为最靠近镜面,然后最大声压级值像接收器13一样不断下降,直到达到70 dB左右。
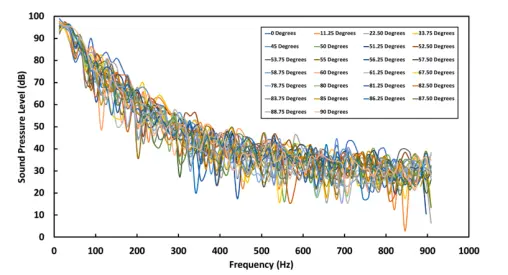
图7 接收机1在不同镜底角度下的原始结果
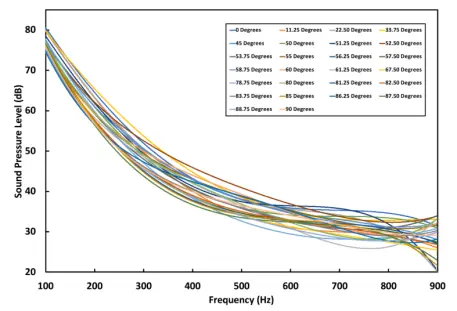
图8 接收机1在不同镜底角处用四阶多项式



编辑推荐




最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
