




 广告
广告





















































一文讲清九大车道偏离辅助LDA法规标准

1.什么是车道偏离辅助LDA
2.乘用车LDA法规
3.商用车LDA法规
1.什么是车道偏离辅助LDA
车道偏离辅助LDA(Lane Departure Assist)系统:主要由车道偏离报警LDW(Lane Departure Warning)和车道偏离抑制LDP(Lane Departure Prevention)两部分组成。
车道偏离报警LDW:通过前视摄像头识别车道线,当驾驶员无意识偏离当前车道时,系统会计算自车与车道线的相对距离、车辆的横向速度、转向灯状态、驾驶员状态、车辆的横向加速度以及当前环境等因素,采用车道偏离报警提醒驾驶员。帮助驾驶员避免或减轻车道偏离带来的风险,提升行车安全。
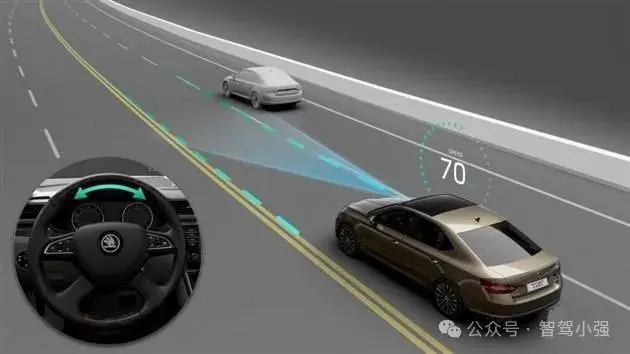
车道偏离抑制LDP:同样通过前视摄像头识别车道线,当驾驶员无意识偏离当前车道时,系统会计算自车与车道线的相对距离、车辆的横向速度、转向灯状态、驾驶员状态、车辆的横向加速度以及当前环境等因素,并通过控制方向盘对车辆进行纠偏。防止车辆偏离车道,进一步保障行车安全。
车道偏离辅助LDA系统会受到一些使用条件的限制,例如驾驶员开启转向灯、车辆压线行驶、车道线不明显或被遮挡、车辆在行驶过程中因路况原因大幅度颠簸等情况,都可能影响系统的正常工作。同时,天气和道路环境等因素也可能导致车道辅助功能失效。因此,在使用这些功能时,驾驶员仍需要保持警觉,注意道路情况。
2.乘用车LDA法规
2.1 (EU)2021/646-ELKS
根据欧盟指令(EU)2019/2144 《一般安全条例(GSR)》的要求:
从2022年7月6日开始,新申请欧盟整车型式认证的M1类和N1类车型都应装配车道偏离辅助系统,并且满足(EU)2021/646 《紧急车道保持系统(ELKS)》的要求;
自2024年7月7日起,所有的M1和N1类新车车辆都应装配车道偏离辅助系统,并且满足(EU)2021/646 《紧急车道保持系统(ELKS)》的要求。

646中的紧急车道保持系统ELKS (Emergency Lane Keeping System)包括车道偏离警告系统LDWS(Lane Departure Warning System) 和方向纠偏功能CDCF(corrective directional control function),即LDW和LDP。
646要求LDWS和CDCF上电自启动。
LDWS应至少在65~130km/h之间的车速范围内(如果最高车速低于130km/h,则为最高车速)和所有车辆负载条件下处于激活状态,除非进行了停用。仪表在车辆偏出车道线内沿外0.3m前发出报警。

CDCF至少在70~130km/h之间的车速范围内(如果最高车速低于130km/h,则为最高车速)和所有车辆负载条件下处于激活状态,除非进行了停用。车辆最远不能偏出(实线)车道线内沿外0.3m。
2.2 ADR 107-LKS
ADR 107是澳大利亚制定的M1(MA、MB、MC)和N1(NA)类轻型车的车道保持系统LKS(Lane Keeping Systems)法规,改编自欧盟法规(EU)2021/646。
ADR 107中的LKS和(EU)2021/646中的ELKS一样,也是由车道偏离报警系统LDWS和方向纠偏功能CDCF组成。
在65km/h的碰撞中,驾驶员头部严重受伤的风险是20%,车速110km/h的碰撞中,驾驶员头部严重受伤的风险会急剧增加到90%。
因而,LDWS应至少在65~130km/h之间的车速范围内(如果最高车速低于130km/h,则为最高车速)和所有车辆负载条件下处于激活状态;CDCF至少在70~130km/h之间的车速范围内(如果最高车速低于130km/h,则为最高车速)和所有车辆负载条件下处于激活状态。
与646要求出具“空、满载均能正常工作的声明”不同的是:ADR 107需要对车辆分别进行空载和满载测试。
2.3 GB/T 39323-2020-LKA
GB/T 39323-2020《乘用车车道保持辅助(LKA)系统性能要求及试验方法》是由中国工信部提出的法规,规定了M1类乘用车车道保持辅助LKA系统的要求、试验条件和试验方法。
车道保持辅助LKA(Lane Keeping Assist):在车辆行驶过程中,实时监测车辆与车道边线的相对位置,持续或在必要情况下控制车辆横向运动,使车辆保持在原车道内行驶。
车道居中控制LCC(Lane Centering Control):在车辆行驶过程中,实时监测车辆与车道边线的相对位置,持续自动控制车辆横向运动,使车辆始终在车道中央区域行驶。

车道保持辅助LKA可以是车道偏离抑制LDP也可以是车道居中控制LCC。LKA至少应在70~120km/h的车速范围内正常运行,LDP应确保车辆偏离不超过车道线外沿外0.4m,LCC应确保车道偏离不超过车道边线外沿。
LDP引起的车辆纵向减速度不大于3m/s²,速度减小量不大于5m/s。
LKA引起的车辆横向加速度不大于3m/s²,横向加速度变化率不大于5m/s³。
2.4 R79-CSF
UN ECE R79法规是联合国欧洲经济委员会制定的一项关于转向装置的统一技术法规,被欧盟、日本、澳大利亚、菲律宾、新加坡、欧亚经济联盟等多个国家和国际组织引用为汽车准入法规。
R79法规适用于M类和N类车型,除了转向系统的要求外,R79针对L2等级的智能驾驶系统也提出了具体技术要求和试验方法。主要包括:
A-ACSF:自动泊车、遥控泊车、遥控驾驶;
B1-ACSF:不可脱手的智能巡航功能;
C-ACSF:打灯换道;
CSF:方向盘控制功能(车道纠偏LDP);
ESF:紧急转向功能;
RMF:风险缓解等几个功能。
R79对CSF功能的性能和报警要求与(EU)2021/646对CDCF的要求一样。区别是:
646只适用于M1和N1类车型,R79适用于所有M类和N类车型;
646要求CDCF上电自启动,R79则不要求CSF上电自启动;
646对CDCF有最小激活车速要求,R79对CSF的激活车速无要求,由主机厂自行申报激活车速范围;
646对CDCF只要求实线纠偏,R79对CSF激活的车道线类型由主机厂自行申报。
2.5 GB/T 26773-2011-LDWS
GB/T 26773-2011《智能运输系统 车道偏离报警系统 性能要求与检测方法》是ISO 17361:2007的国标转化,由全国智能运输系统标准化技术委员会提出并归口。
要求乘用车最迟报警线位于车道线外沿外0.3m处,商用车最迟报警线位于车道线外沿外1m处。
车辆的横向偏离速度V在0~0.5m/s之间时,最早报警位置为车道线外沿内0.75m;
车辆的横向偏离速度V大于1.0m/s时,最早报警位置为车道线外沿内1.5m;
车辆的横向偏离速度V在0.5~1.0m/s之间时,最早报警位置为车道线外沿内1.5×V m;
3.商用车LDA法规
3.1 R130-LDWS
R130《关于就车道偏离报警系统(LDWS)方面批准机动车辆的统一规定》是联合国欧盟经济委UN ECE对M2、M3类和N2、N3类商用车的车道偏离报警系统LDWS的统一要求。
欧盟(2014年)、英国(2014年)、日本、韩国、中国台湾地区、欧亚经济联盟(俄罗斯、白俄罗斯、哈萨克斯坦、吉尔吉斯斯坦、亚美尼亚)、马来西亚(2020年)、新西兰、哥伦比亚、墨西哥、以色列等国家和地区均有引用R130法规,要求新注册的M2、M3类和N2、N3类商用车需要搭载LDWS系统,且满足R130法规的要求,并取得R130证书。
R130要求LDWS上电自启动,至少需要在车速超过60km/h时处于开启状态。
LDWS系统需要在有明显车道线的直道和曲率半径在250m以上的弯道都能正常工作。
当车辆无意偏离本车道时,LDWS系统需要在车辆最外侧越过车道线外沿0.3m之前,向驾驶员发出报警信号。
更多R130相关信息,详见前文:
R130-车道偏离报警系统LDWS法规解读及认证测试要求
3.2 ADR 99-LDWS
ADR 99是澳大利亚根据R130制定的澳大利亚商用车法规,要求LDWS系统需要适用澳大利亚的车道线类型。
从2026年9月1日起,所有的MD、ME、NB、NC类商用车新车型,均需要满足ADR 99的要求;
从2028年9月1日起,所有的MD、ME、NB、NC类商用车新车,均需要满足ADR 99的要求。
但是允许乘客站立的公交车、铰接式公交车、四个及四个以上车轴的车辆、越野和非道路适用车辆可申请豁免。
3.3 GB/T 41796-2022-LKAS
GB/T 41796-2022《商用车车道保持辅助系统性能要求及试验方法》是由中国工信部提出的法规,规定了M2类、M3类和N类车辆的车道保持辅助LKA系统的技术要求和试验方法。
41796中的LKAS由车道偏离报警LDW和车道偏离抑制LDP组成。
N2、N3类车辆至少在60~108km/h之间的车速范围内(如果最高车速低于108km/h,则为最高车速)处于激活状态;
N1、M2、M3类车辆至少在72~108km/h之间的车速范围内(如果最高车速低于108km/h,则为最高车速)处于激活状态。
车道偏离预警LDW至少应在车辆偏离车道线外沿外0.3m前发出。
车道偏离抑制LDP需要让N1类车辆最远不超过车道线外沿外0.4m,M2、M3、N2、N3类车辆最远不超过车道线外沿外0.75m。

3.4 JT/T 883-2014-LDW
JT/T 883-2014《营运车辆行驶危险预警系统 技术要求和试验方法》是中国交通部提出的行业标准,规定了营运车辆的前碰撞报警FCW和车道偏离报警LDW的技术要求和试验方法。
车道偏离报警LDW系统需要在白天、夜晚、黄昏和黎明等光照条件下检测到车道线。应能检测符合国标GB 5768.3-2009《道路交通标志和标线 第3部分:道路交通标线》中的下列车道线:
a)黄色和白色实线;
b)黄色和白色虚线;
c)双黄和双白实线;
d)双黄和双白虚线;
e)黄色和白色虚实线。
883对车道偏离报警的功能要求与GB/T 26773-2011的要求一致,即商用车最迟报警线位于车道线外沿外1m处。







最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
