




 广告
广告





















































一种智能车辆导航激光雷达感知方案

-
调整计算
使用GM帧中投影的SG,根据单元值的符号计算校正项(图7)。
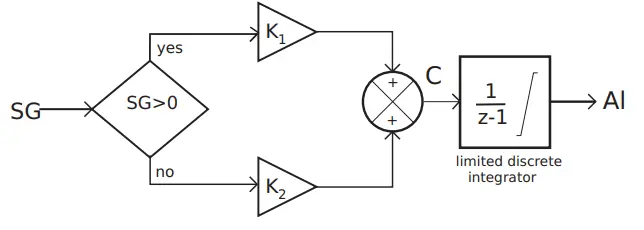
图7 一个细胞内的正负积累机制
首先,使用增益增加被占用细胞的积累水平。这执行了静态世界的映射,但移动障碍物穿过的细胞也增加了。静态障碍物和移动障碍物的主要区别在于,移动障碍物不会一直占据相同的位置。在移动的物体离开单元格后,被占据的单元格将变得自由。
这就是为什么使用增益来减少空细胞的原因。这种负积累过程具有不可忽略的响应时间。为了减少这种滞后,必须大于。这种解决方案的一个特殊问题是,每次扫描时没有检测到的小障碍物将不会被映射。
-
更新
更新过程是一个集成。它是通过将累积水平与修正项相加来实现的:
其中和分别为图7所示时刻t的积累水平和修正项。
-
调质
在这种整合方法中,累积水平取决于几个参数:占用率、整合时间和物体相对于单元大小的可见比例。为了解决这个问题,饱和度限制了积累水平。图8显示了一个单元格根据SG值的累积级别行为。
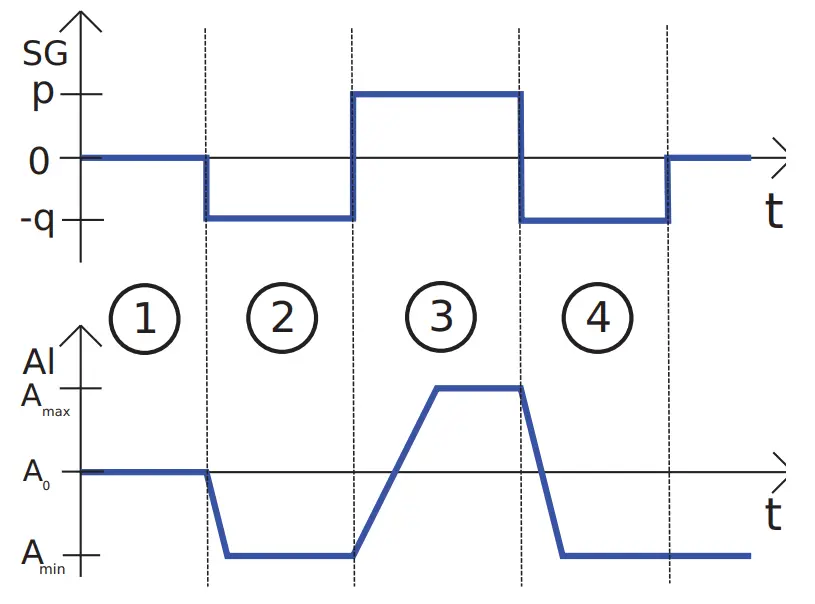
图8 在第1部分中,没有扫描单元格:没有改变。在第2部分中,单元格被扫描为空:减少,直到阈值。在第3部分中,检测到单元格被占用:以不同于的速度增加。在第4部分中,经过几次迭代后,单元格被声明为空。
B. 移动对象检测
本文提出的检测方法是将当前SG与GM进行比较,由于变换(极坐标/笛卡尔变换和局部/全局变换),SG在GM上的投影不包含整数值,而是包含实数。SG单元与检测阈值进行比较,以便仅考虑包含对象的单元。然后,将相应GM细胞的Al与分类阈值进行比较,以确定细胞是否被移动或静态物体占用。图9解释了分类方案。
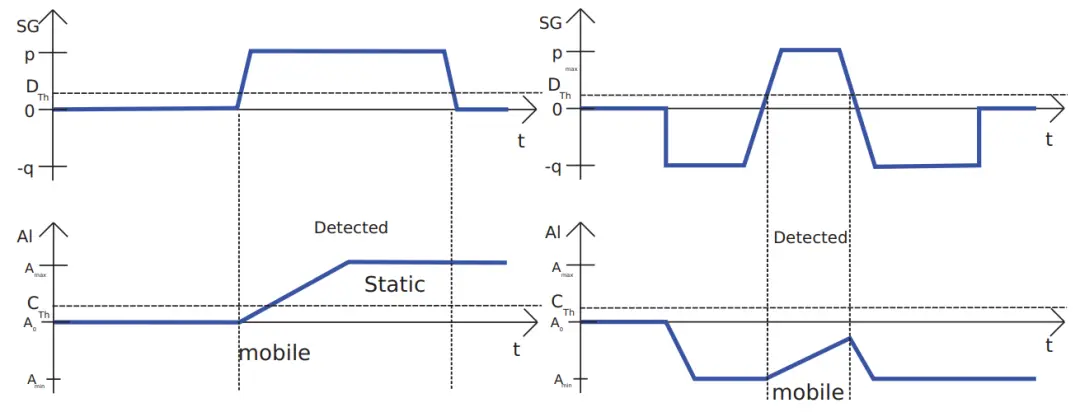
图9 占用单元的的行为取决于对象的动态。在左边,静态对象在几次后达到阈值。在右边,被移动物体占据的细胞在细胞被检测的时间内没有达到阈值。
Ⅳ 结果
A. 实验装置
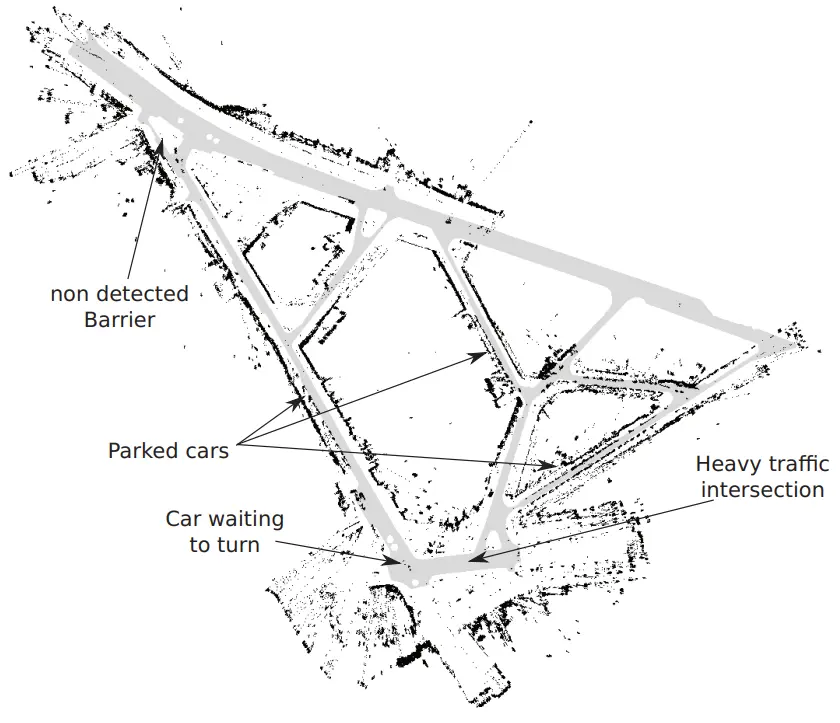
之前提出的算法在城市条件下用真实车辆获取的数据集上进行了测试。完整的数据集是一个20分钟长的序列,是与巴黎的法国地理研究所(IGN)合作获得的。车辆沿着参考轨迹(图10)重复3次。

图10 顶部是测试车辆,前方有激光雷达传感器,底部是车辆跟随的轨道
本文利用3个传感器提供的数据:激光雷达Alasca XT,Applanix定位系统和一个摄像头。为了实现传感器间数据的同步,采用了GPS时间戳。激光雷达的安装方式是使其最底层水平。它的采集频率为15Hz,车前角分辨率最大为0.25°,侧角分辨率最大为1°。Applanix定位系统由2个GPS、1个IMU和1个里程传感器组成。通过将其输出与其他2个定位系统IXSEA LandINS(通常用作地面真值的高精度定位解决方案)进行比较,评估了精度的质量。相机是由激光雷达触发的:这简化了同步问题。这个摄像头安装在前保险杠激光雷达的正下方。到目前为止,该摄像头仅用于验证和场景可视化。
SG覆盖范围200米,角场180°,距离分辨率0.5m,角分辨率1°。使用的全球GM面积为800m×700m,分辨率为0.5m。
该算法已在MATLAB中实现。在目前的实现中,它不是实时的:在笔记本电脑(英特尔迅驰2Ghz)上计算和显示一步需要1.5s。
在这个实现中,增益被设置为1,而的值为[0 30],这意味着在每次扫描时检测到静态元素映射的情况下,静态元素映射的最大延迟为2s。为了增加系统对移动对象映射的反应性,递减增益必须高于。在本实验中,被设置为5。本文没有选择一个太重要的值,以避免错误的测量对地图产生重大影响。检测阈值设置为0.5,分类阈值设置为10。所有这些值都是通过试测的方式固定下来的。



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
