




 广告
广告





















































一种智能车辆导航激光雷达感知方案

验证分两步进行。首先是映射的验证,然后是分类的验证。
映射验证已经使用IGN提供的参考空闲空间映射完成。这张地图没有考虑到一些长时间静止物体的存在,比如停着的汽车。
分类验证是通过使用来自相机的图像进行的。这里用几个场景(十字路口、穿越汽车等)进行说明,后面会详细说明。
1)制图结果:本文将参考轨道一个循环期间生成的地图(图11)与IGN提供的称为“自由空间地图”的地图进行比较。这张自由空间地图是路面的3D网格,它是由专家操作员使用摄影技术从高分辨率航空图像中手动创建的。
本文想要提出的关键点是,尽管场景中存在许多移动物体,但像建筑物这样的静态物体被正确地映射出来,并且正确地确定了自由空间。根据传感器的视场,可以使用不同的激光雷达层来映射几个对齐的物体,比如停放的汽车和建筑物。由于移动的物体不能被及时跟踪,并且可能瞬间变成静止的(例如,在交通灯前停车),因此它们在GM中可能会出现静态环境。当移动物体在停车时离开自我车辆传感器的视野时,这个问题就会出现。小物体(一般小于0.5m或空心物体),如障碍物或路标,无法使用所提出的方法正确映射。这主要是由于传感器模型网格分辨率的问题。
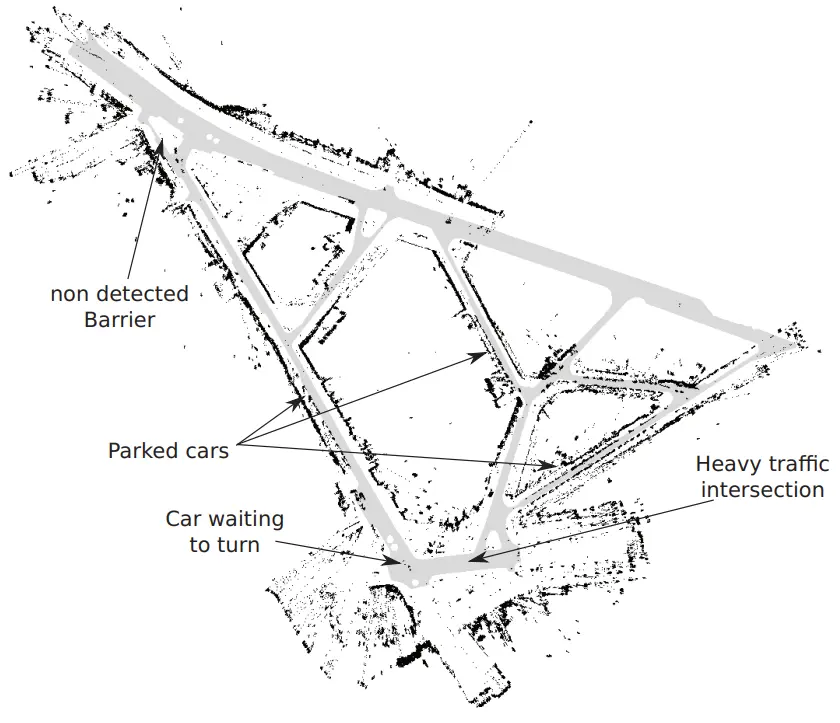
图11 GM与自由空间图对比,黑色为被映射占用的细胞,灰色为自由空间的二维投影
2)分类结果:下面从完整序列中提取的两个场景展示了算法在不同情况下的分类性能。分类输出在GM上表示,与映射叠加,使用两种颜色。绿色细胞被认为是移动的,而蓝色细胞被认为是静态的。第一列包含车辆周围GM的缩放部分和分类对象。在第二列中,给出了场景视图(摄像机已安装在与激光雷达相同的高度)。检测到的对象在这里使用边界框手动高亮显示,以便在GM中检测到的对象与其在图像中的位置之间建立链接。
-
十字路口
这个场景如图12所示。自我车辆停在一个十字路口,前面有两辆车穿过。车辆以很高的径向速度从左右两侧驶来。汽车被正确检测到,而货车部分未被分类。
-
过马路的行人
这个场景如图13所示。车辆驶近一个十字路口,为了让两名行人过马路而停车。行人由于走得慢,部分误分类。
可以注意到,与激光雷达(≈140°)相比,相机(≈70°)的视野很小。因此,侧面的物体在图像上可见之前被激光雷达检测到。
移动的车辆被很好地探测到。在长车辆的情况下,已经观察到一些漏检,因为它们的长尺寸在相当长的时间内引起空间积累。
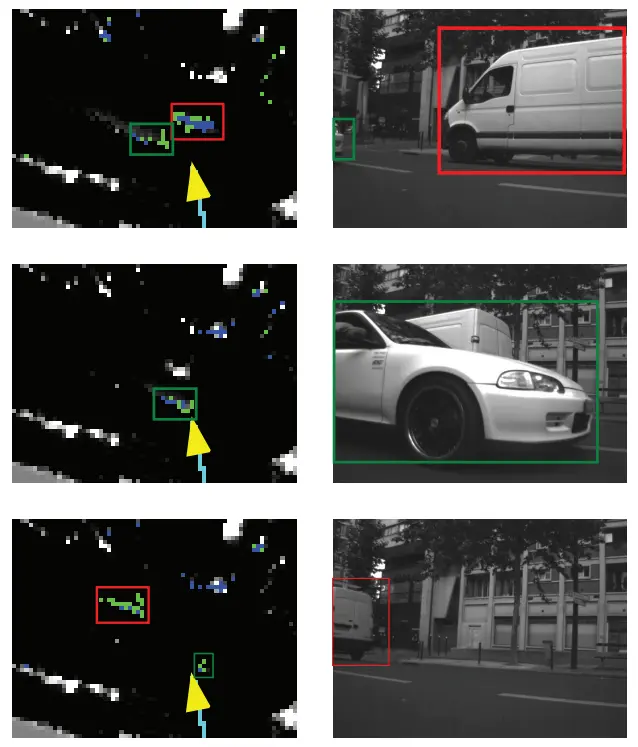
图12 十字路口的场景
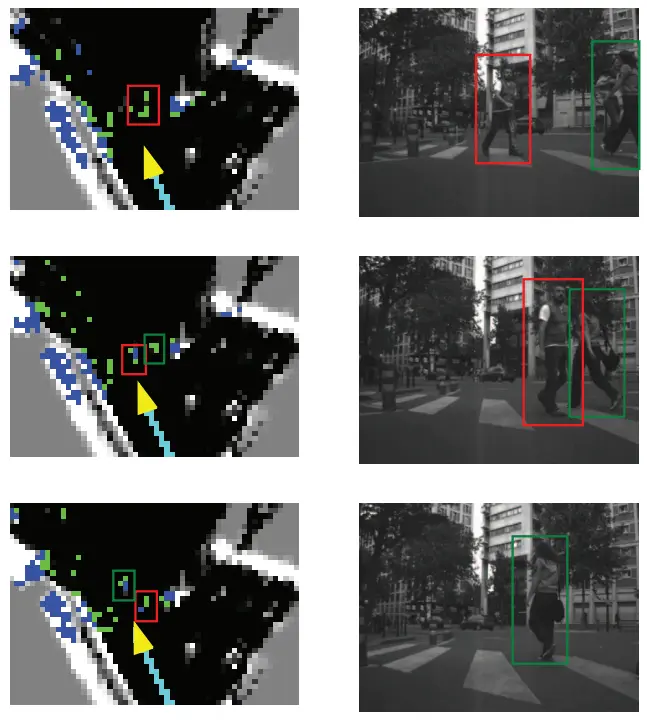
图13 行人过马路的场景
如果物体移动太慢,比如行人在过马路前在人行道上等待,也会发生漏检。通过使用更高分辨率的地图,分类结果可能会得到改善。
Ⅴ 结论
本文提出了一种基于局部和全局网格相互作用的感知融合方案。这项工作的贡献在于提出了一种可以提供导航空间、移动障碍物和静态物体的智能方法。在其目前的实现中,精确的定位是一个先决条件。本文在这里报告的结果说明了这种策略在检测移动物体方面的良好性能,这是感知中关键的数据处理步骤。一种观点是分析航位推算定位方法(例如使用激光雷达里程计)将如何降低该方法的性能。另一种观点是使用像IGN地图这样的先验信息,以便从先验地图开始,或者通过过滤道路上的物体来提高检测性能。
在这里,数据融合简单地使用饱和的正负积累来完成,使用无积累来管理知识的缺失。这种策略对于捕获来自所有激光雷达回波的信息片段非常有效。最后,这种融合框架可以适应其他融合范式的实现,如贝叶斯或证据范式。为了在严格的框架中处理信息缺失问题,证据融合方法是本文的主要视角。
参考文献



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
