




 广告
广告





















































一种智能车辆导航激光雷达感知方案

编者按:随着自动驾驶技术的快速发展,环境感知系统已成为智能车辆导航的核心。本篇文章展示了一种基于激光雷达(LIDAR)的环境感知方案,旨在同时实现环境建图和移动障碍物的检测。该研究基于多层、多回波的LIDAR传感器,通过全局和局部网格的融合方法,不仅解决了复杂城市环境中障碍物的识别问题,还提出了一种高效的动态物体检测策略。实验验证显示,该方案在处理快速移动物体和动态环境中的表现尤为出色,展示了其在自动驾驶领域的应用潜力。此研究为LIDAR感知的多模态数据处理提供了创新思路,进一步提升了自动驾驶汽车在复杂城市环境中的导航能力。文章不仅为研究人员和工程师提供了可行的技术参考,也为智能驾驶的商业化应用奠定了基础。
本文译自:
《A lidar Perception Scheme for Intelligent Vehicle Navigation》
文章来源:
2010 11th International Conference on Control Automation Robotics & Vision, Singapore, 2010, pp. 1809-1814.
作者:
Julien Moras; Véronique Cherfaoui; Phillipe Bonnifait
作者单位:
法国贡比涅公立大学
原文链接:
https://ieeexplore.ieee.org/document/5707962/
摘要:在城市环境中,移动障碍物的检测和自由空间的确定是驾驶辅助系统或自动驾驶车辆的关键问题。本文提出了一种基于激光雷达的乘用车感知系统,能够同时进行映射和移动障碍物检测。目前,许多激光雷达提供多层和多回波测量。处理这种多模态的一种聪明方法是在全局和局部框架中使用投影在路面上的网格。全局框架生成映射,局部框架用于处理移动物体。已经开发了一种基于正负积累的方法来解决快速移动障碍物的残余问题。这种方法也非常适合于多层和多回波传感器。在IBEO Alasca和Applanix定位系统上进行的实验结果表明了这种感知策略的性能。
关键词:智能车辆,环境感知,地图,移动目标检测
Ⅰ 引言
在城市地区,用于人类交通的自动驾驶汽车正在成为现实。事实上,世界上的几项工作已经显示出一些令人印象深刻的成果。然而,城市环境下的自动驾驶仍然是一个问题,需要对场景的理解来预测其演变。感知系统使用不同的传感器,测量结果可能有噪声、有偏差或不完整。新的激光雷技术(多层、多回波)可以通过显著增加测量次数来解决这一问题。这种传感技术即使激光束被部分反射,也能提供对周围环境的可靠感知。感知问题可以分解为不同的部分:定位、映射和移动物体的检测和跟踪。
-
自我定位(EL):定位任务是机器人应用中反复出现的问题。GPS、惯性测量单元(IMU)、本体感知或外感知里程计是智能辆的主要解决方案。如今,可靠的亚公制定位系统已经存在,但它们对于商业应用来说仍然过于昂贵。
-
映射(M):许多机器人作品用不同的方法处理了静态环境的映射。通常,映射与定位任务相结合,以解决SLA(Simultaneous localization And mapping)问题[1],[2],[3]。主要存在两种方法:基于特征的方法尝试用一组预先确定的几何形状(线段、弧线等)进行映射,网格方法基于离散空间表示,使得数据关联和融合更容易。
-
移动目标检测和跟踪(MOT):SLAM方法对场景中移动物体的存在非常敏感。事实上,这些算法是基于映射过程的时间相干性。解决这个问题的一种方法是检测和跟踪运动物体[4],[5],[6],[7]。通常,检测和跟踪系统是在基于特征的框架中开发的,分为3个步骤:用于对象检测的原始数据聚类、数据关联和时间融合。误差的主要来源是在聚类阶段和关联步骤。最近的一些作品使用了参数模型[8]。使用网格方法解决MOT问题并不常见,但一些与贝叶斯占用过滤器(BOF)相关的工作[9]倾向于通过具有特定标准的聚类单元来解决该问题。
在这项工作中,考虑一个在平面世界中移动的移动机器人。由于假设是在城市环境中,因此可能会有很多障碍物和很多移动物体,如图1所示。在本文中,没有考虑自我定位(EL)问题,这就是为什么使用定位系统“Applanix Pos LV 220”,这是一个集成的多传感器系统,可以提供非常精确的车辆3D姿态(位置和方向)。另外两个问题(M和MOT)是联系在一起的,因为它们处理的是感知系统。主要的区别在于对象的移动性。这是用来做分类的标准。为了管理这个策略,使用了基于网格的框架。
本文提出了一种感知方案,主要用于探测周围的移动物体,允许在存在移动物体的情况下映射静态环境。这种检测策略可以在跟踪算法中使用,以便能够预测导航应用的空闲空间。这种方法的主要优点是没有聚类阶段,适用于各种各样的城市障碍物(行人、车辆、自行车等)。它还可以应对新一代激光雷达频繁出现的多回波测量。
在第一部分中,提出了融合传感器数据的框架。然后,提出了基于accu-的融合策略模拟将在展示实验结果的一节之后进行描述。
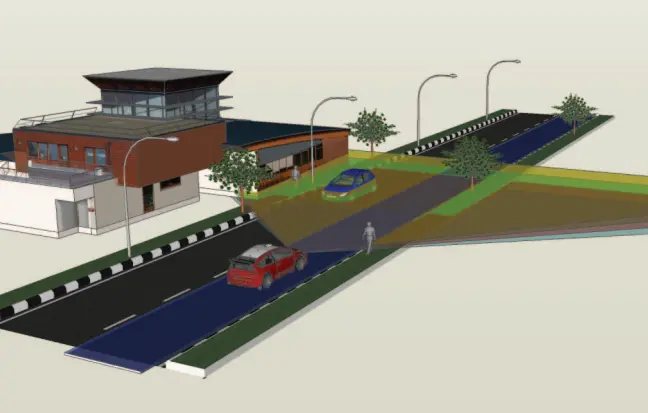
图1 城市情况:红色小车配备了多层激光雷达
Ⅱ 融合框架
本文使用二维网格表示,定义为投影在地板上的离散空间。网格的每个单元格代表一块空间,并包含根据对环境的感知计算出的数据。本文使用对偶空间表示:一个称为扫描网格(SG)的瞬时局部地图,它由大小为的极性单元组成(是长度,表示角扇区)和一个称为网格地图(GM)的全球地图,这是世界上引用的笛卡尔地图。笛卡尔单元格是长度的平方。本节介绍如何根据传感器模型和环境模型定义这些图。
A. 激光雷达扫描
使用的传感器是IBEO阿拉斯加激光雷达。它是一个四扫描传感器,在每次扫描时提供环境的3D点云。该传感器可以在320°的前场范围内进行长达200米的测量,根据所需的角度分辨率,速率从8Hz到40hz不等。它使用905nm波长的红外激光器,孔径为0.25°。角度分辨率可根据如图(2)所示的角度进行自适应。例如,如果激光束被障碍物部分反射,该传感器还能够在每条视线上提供多个回声。另一个特点是,它可以在考虑的瞄准线上不返回任何测量结果。如果没有回波,可能有两种情况:在最大范围内没有物体,或者有障碍物没有反射激光束。因此,本文提出的传感器模型要考虑到这些传感器的特殊性。
B. 多回波扫描网格
利用传感器模型,可以从每次激光雷达扫描中建立扫描网格(SG),这是一个二维局部瞬时占用网格。由于激光雷达是一个极坐标传感器,因此使用极坐标网格模型来计算细胞的占用情况。传感器精度高于网格分辨率,网格以传感器为中心。因此,可以使用理想的传感器模型作为图4顶部所示的1D显式解。考虑扫描网格,设SG表示取整数值的单元的状态,指的是表1所描述的单元的三种不同状态。该值的强度对应于冗余度,即置信度的度量。
表1 扫描网格赋值表
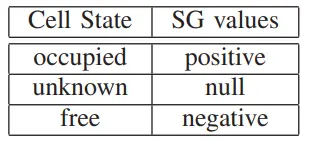

图2 阿拉斯加XT角分辨率与测量角度和频率的关系
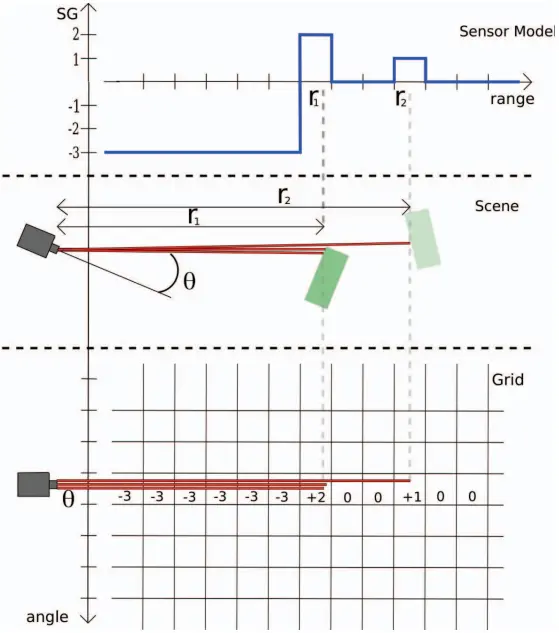
图3 多回波传感器模型
图3说明了这一点。扫描网格的每一行对应一个角扇区。在这个扇区中,有几个回波是可能的,因为有三个原因:i)在一个方向上有可能接收到几个回波,ii)在同一平面上的4层投影可以提供位于不同距离的回波,iii)激光雷达的角分辨率不是恒定的,有时比网格的分辨率好一些(几个激光雷达方向可以在极地网格的同一列上投影)。因此,值得注意的是,这种网格传感器模型考虑了多重回波能力。SG初始化为0,每个角度独立处理,如图3所示,每次测量增加相应单元的值,减少第一个被占用单元之前的单元的值。负信息表征了空闲空间。两个被占用细胞之间的细胞和最后一个检测到的细胞后面的细胞在0处受到影响。图4给出了一个SG的例子,其中观察到多次回波。
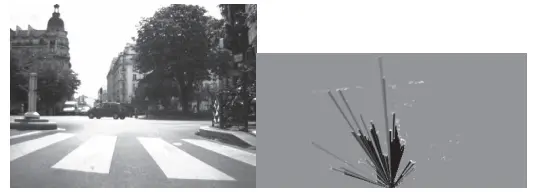
图4 多回波传感器模型:左图为场景的摄像机视图,右图为笛卡尔坐标系下投影的SG,白色单元格被占用,黑色空闲,灰色未知。
C. 网格地图
网格地图(grid-map,GM)被定义为一个全局累积的二维网格,并存储映射信息。它是一个笛卡尔地图,每个大小为的单元格都是全局空间的2D投影的一部分。通过全局,这个网格被引用到一个被认为是固定的东-北-上框架。GM用于创建基于激光雷达的区域感知地图。这意味着场景的所有静态元素都将被映射,包括停放的汽车等伪静态元素。
D. 从扫描网格到网格地图
该方法的一个关键点是,SG可以使用Applanix传感器提供的姿势在GM框架中投影,如图5所示。首先,使用双线性插值将极坐标网格转换为笛卡尔网格。然后,应用笛卡尔SG变换来进行投影。这包括一次旋转和一次平移。旋转是通过双线性变换完成的,因为每个投影单元可能部分投影到几个单元上。双线性变换可能会插值值,因此,在变换后的单元格中,值是极坐标单元格邻域值之间的混合物。这会导致边缘平滑。
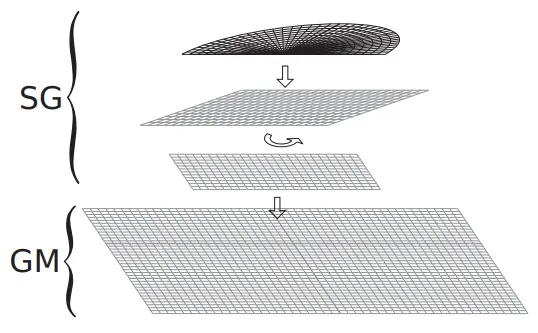
图5 使用SG和GM的连续转换
Ⅲ 累加算法的实现
应用于GM的处理体系结构如图6所示。本节详细介绍了使用累加算法的GM更新阶段。第Ⅱ节中提出的框架是通用的,可以使用概率或证据融合框架,而不是使用所提出的积累算法进行融合。描述了积累过程来解决映射和移动对象跟踪(MMOT)的问题。
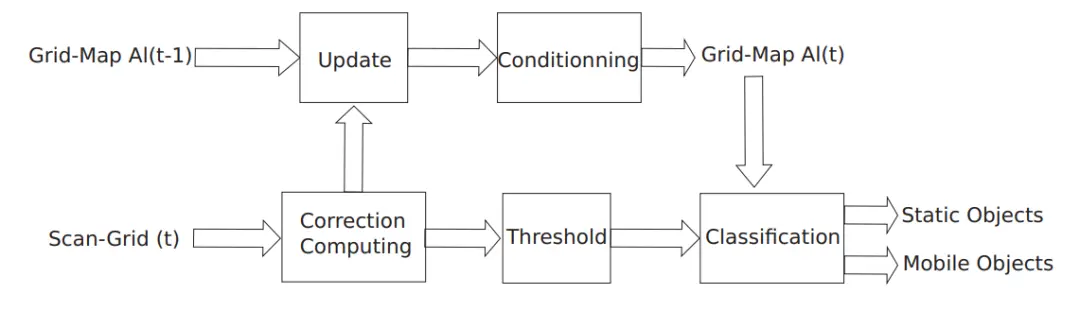
图6 GM过程的体系结构
A. GM中消极和积极的积累
在累积策略中,GM的每个单元存储一个表示当前占用累积水平的指示器。

极限表示空闲细胞,而表示已占用细胞。该地图初始化为平均值在所有单元格中。这意味着没有对环境的先验知识。
更新过程使用来自SG的值提供正累积或负累积。增量过程旨在通过像二维直方图一样整合占用测量值来构建地图[10]。最近的一些研究使用了类似的方法来解决SLAM问题[11]。这项工作侧重于定位问题,使用地图上的匹配来实现里程计。相反,在本文的方法中,提供了定位,没有匹配或数据关联,因为算法只是执行过滤以提取移动对象。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
