




 广告
广告





















































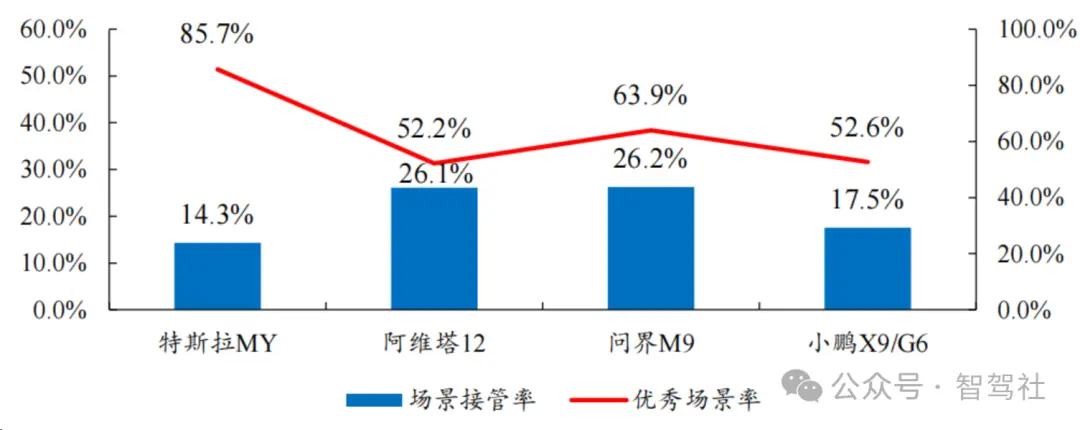
国内外主流车型智能驾驶测试评价体验

在换道场景方面,更为强调路径规划。问界与小鹏均存在道路上无明显障碍物且用户觉得没有必要时,进行多次变道的场景。在上海测试中,小鹏偏好变道靠左行驶,而问界左转靠左、右转靠右车道的逻辑明显,且偏好连续变道(必要性不强);问界会在很远的距离就开始提前变道,但在当时的路况中有时并非最优策略。阿维塔同样存在车道选择犹豫的场景,虽未导致接管,但影响驾驶体验。
在汇流分流场景中,预测模块准确度与切入车流时机较为重要。汇流分流场景又包含上下匝道、车道线合并、主辅路合并分流等场景,要求车辆对车道车流有精准的感知预测,测试场景中特斯拉表现均较为优秀。但从特斯拉的一个测试场景中注意到,后方消防车辆以鸣笛的方式传递需要让道的信号,特斯拉 FSD 暂时不具备听力和分辨消防车的能力,按照美国的交规只能采取人工接管。
除以上场景之外,目前无论是特斯拉还是国内车企在加塞场景方面仍有较大进步空间。在加塞时,自动驾驶系统一方面要保持安全距离,另一方面要择时汇入车流,但中间涉及到博弈等复杂问题,特别是在堵车时变道加塞场景,当前自动驾驶系统基本都是完成加塞预备动作后卡在中间动弹不得,需要人为接管推进。
3.3.5、 复杂道路场景:环岛场景仅特斯拉能处理,国内暂未覆盖
复杂道路场景基本是自动驾驶系统很难处理的道路场景,在我们的测试中,这类场景较少,但是接管率较高。其中环岛场景一直以来都是处理难题,在环岛场景中,自动驾驶车辆需要完成驶入、换道、驶出等操作,再加上常见的不遵守交通规则的非机动车,更增加了复杂性。自动驾驶车辆需要根据驶出环岛的路口选择合适的内侧、中间、外侧车道,驶出环岛时需要提前变换到中间车道后再变换到外侧车道,最后驶出环岛。内侧车道行驶干扰少,但是驶出时需要变换两条车道,对感知、规划增加了更多挑战;外侧车道行驶,驶出环岛成本最低,但是需要面对的无序的干扰较多。在如此复杂的规则下,目前国内车企在面对环岛场景时会提前提示接管,并自动退出自动驾驶功能。而特斯拉 FSD 表现出众,能够应对测试场景中出现的环岛场景。
掉头场景方面,问界 M9 在广州实现了一次掉头操作,在重庆与北京均未成功;智己 L6 在上海也实现了一次自主掉头;小鹏在掉头场景之前会判断能否一把方向盘掉头,否则会提示接管。修路场景方面,道路正在进行维修或施工,多异形障碍物,对感知能力要求较高的同时,也需要车辆及时重新规划路径,在我们的测试中仅有特斯拉、问界、小鹏遇到该类场景,但除特斯拉外的国内车企对修路场景的通过率均较低。
3.4、 城市分析:不同城市中,不同的规控策略带来的体验差异较大
前文提到国内车企对于城市 NOA 功能采取的开城策略,同时不同城市的驾驶风格、驾驶习惯存在差异,道路工况也存在较大差异,相比较下能够更好发现车企自动驾驶的能力。为了比较自动驾驶系统在不同城市之间的表现,我们选取问界与小鹏在北京、上海、广州、重庆四地进行了测试。从场景数量的分布上看,问界在重庆、北京的场景样本数量最多;小鹏在上海、北京的场景样本最多,但是在广州限于测试时间与路况,仅有 11 个场景样本。
在道路工况方面,上海所测试道路车道线较为清晰,且车道较为宽敞,红绿灯并不复杂,相比之下,北京所测试某些道路的车道线较为模糊复杂,某些非机动车道比机动车道还要宽,为自动驾驶系统的运行造成了较大的挑战;重庆方面,不仅车道多为窄路,且交通信号灯较为复杂,尽管车道线状况良好但也会有信号灯识别错误的情况出现;广州测试道路也相对宽敞,具有清晰的车道线与红绿灯提示。在交通参与主体方面,相较重庆、广州而言,北京、上海测试路段遇到的司机显得较为文明礼让,而重庆测试路段遇到的司机相比则更为激进,重庆路况复杂的另一因素在于由于多为窄路,路边停车以及非机动车停放较多,部分场景下车辆规划路线上会遇到长时间的停泊车辆,对自动驾驶系统造成较大的考验。
- 下一篇:向新而行,海克斯康进博之旅即将开启
- 上一篇:新能源汽车控制系统中的电压环



编辑推荐




最新资讯
-
imc/GRAS/AP首次联袂亮相ATE India 盛会
2025-04-11 13:49
-
GB/T 31486-2024 与 GB/T 31484-2015 修改
2025-04-11 13:48
-
标准介绍丨ASAM ARTI 运行实时接口
2025-04-11 10:29
-
自动驾驶中基于深度学习的雷达与视觉融合用
2025-04-11 10:25
-
标准研究丨《汽车开闭件性能要求和试验方法
2025-04-11 10:24
