




 广告
广告





















































国内外主流车型智能驾驶测试评价体验

端到端自动驾驶逐渐成为行业共识,目前车企的自动驾驶基本已经实现感知端到端,而能够提供拟人化体验的关键,在于预测与规控端的大模型化,在此基础上进一步实现完全端到端自动驾驶。当前领先车企正致力于将预测、规控层面大模型化,逐步走向端到端:
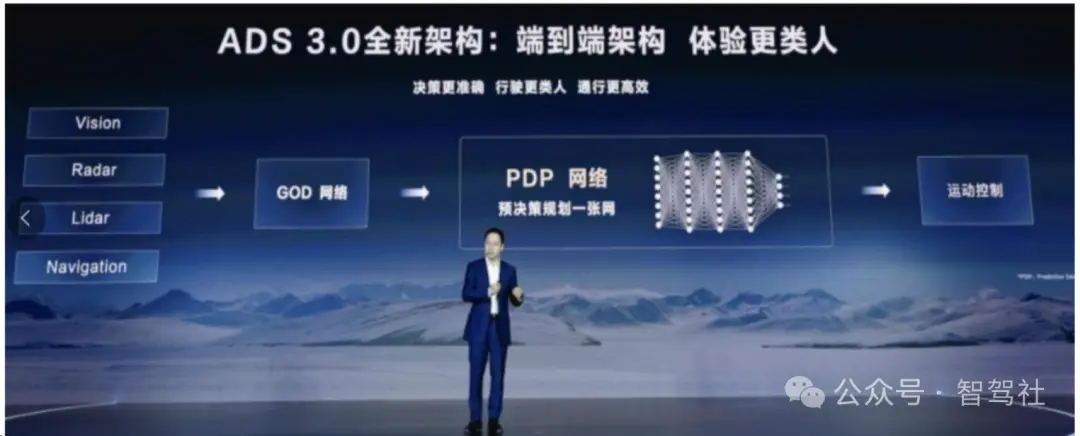
(1)华为:ADS 3.0 中将要采用的采用 PDP 网络(预测决策规控网络),实现了预决策和规划一张网,使得决策和规划更加类人化,行驶轨迹更接近人类驾驶,通行效率更高,复杂路口通过率超过 96%。
(2)小鹏:何小鹏在 520 AI DAY 发布会上提到,较为稳定的传统量产智驾系统,大约有 10 万条左右各类人工定义的规则,而一个无限接近人类司机的自动驾驶系统,大概等效于 10 亿条规则。小鹏端到端大模型由神经网络 XNet+规控大模型XPlanner+大语言模型 XBrain 三部分组成。其中规划大模型 XPlanner 基于神经网络,可以比作智能驾驶的小脑。通过海量数据对规划大模型 XPlanner 进行训练,能让智驾系统的驾驶策略向着拟人化进化,规划大模型 XPlanner 能够让小鹏汽车的智驾系统在真实道路体验中减少 50%的前后顿挫、60%的违停卡死以及 40%的安全接管。可以看到 XOS 5.2.0 OTA 后小鹏的功能覆盖程度已经有了明显提升。
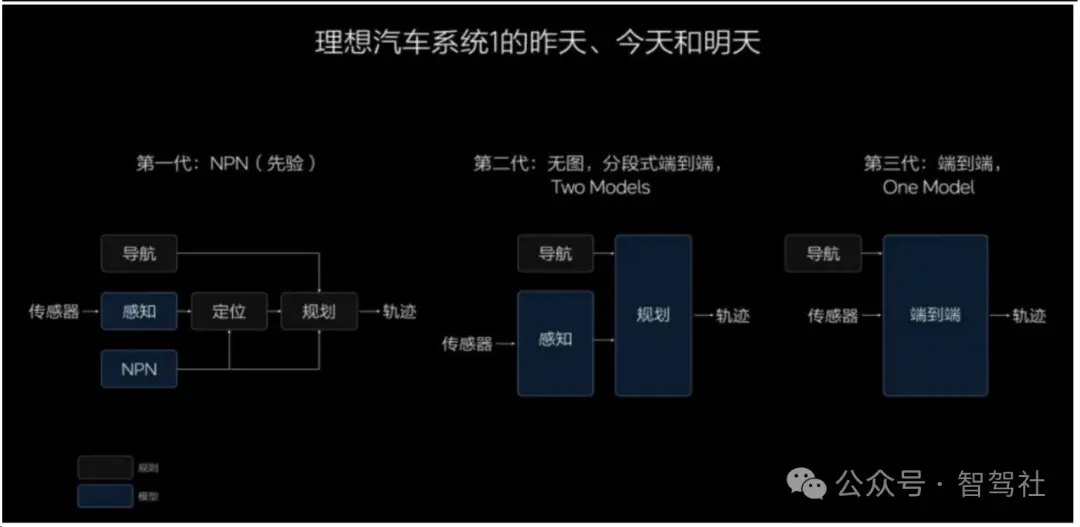
(3)理想:理想在 2024 智能驾驶夏季发布会上发布了端到端+VLM 双系统智能驾驶模型,其中在系统1端到端模型主要用于快速响应常规驾驶问题,当前OTA 6.0使用的是第二代无图模式,只有感知和规划两个模型,最大的变化是去掉了 NPN,不依赖于先验信息,支撑着现阶段理想无图 NOA 全国都能开的实现。在未来,理想的系统 1 将转向类似特斯拉 One Model 的端到端模型,输入是传感器、输出是行驶轨迹,全部由一个模型实现,中间没有任何规则,实现真正意义上的端到端。
除了以上三家车企,其他车企在端到端架构也进行积极布局,如蔚来在 6 月重组智驾团队,将感知和规控团队合并为大模型团队。在端到端架构下,车企训练迭代有望加速,预测决策规划或将更为准确丝滑,类人的自动驾驶体验指日可待。同时,我们可以看到,在最新推送的小鹏天玑 5.2.0 和理想无图 NOA 公测版本,在端到端大模型上次之后,整体智驾的功能体验和覆盖度相较于我们测试时都得到了大幅的提升。因此,我们建议要保持对最新智驾能力的持续跟踪。
- 下一篇:向新而行,海克斯康进博之旅即将开启
- 上一篇:新能源汽车控制系统中的电压环



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
