




 广告
广告





















































国内外主流车型智能驾驶测试评价体验

目前仅有特斯拉能够原地拨杆启动,并且在到达目的地后主动靠边停车,解决“最后 100 米”的问题。国内车企的城市 NOA 功能启动条件不一,如华为系在切换导航目的地之后可以自动启动,而其他车企往往需要先退出城市 NOA 功能再启动;但在到达目的地之后,国内车企都会退出或者降级,需要驾驶员接管。
3.3.3、 避让/绕行场景:国内小鹏处理风格偏稳,华为系处理风格更为自信
过长决策时间(犹豫不决)是避让/绕行场景中的常见问题。避让/绕行场景中,自动驾驶系统需要对行驶路线中突然出现的行人、车辆或者障碍物进行有效应对,与转弯场景一样对自动驾驶系统的综合能力要求较高,而场景处理不好则极有可能引发交通事故或者拥堵。处理该类场景在感知层面需要车辆能够及时识别其他交通主体,在预测层面需要对该交通主体的速度、轨迹进行较为精准的判断,而在规划层面则通常需要重新规划自车行驶路线,而道路情况瞬息万变。模块化的规则驱动的自动驾驶可能会经历反复决策从而行驶速度缓慢,体验中的规则感较强,无法做到像老司机一样流畅。
特斯拉能够识别出交通主体意图,场景处理能力强大。特斯拉 FSD V12 可以看懂无红绿灯道路上欲过马路行人的意图并主动停车让行,在侧方车辆不打转向灯换道过来时能够主动让速,同时在路口与行人博弈时也会有选择让行,如对于闯红绿灯行人,在安全的情况下并没有选择让行,真正做到像老司机。但在我们的测试中,也存在绕行犹豫的情况出现,前方车辆双闪,且道路距离过窄无法通行,在试探过程中后方车辆催促导致接管。
华为 ADS 2.0 在场景处理上较为自信。搭载 ADS 2.0 的问界与阿维塔在绝大部分场景中,避让行为相对积极,同时对侧向距离的把控较为精准,场景中风格较为自信。但如果对手更加强势,则容易触发接管,如在行进过程中,阿维塔出现过与公交车抢道,同时在公交车更为强势抢道后,自车被逼停的情况;问界也存在不避让后方非机动车辆的场景。
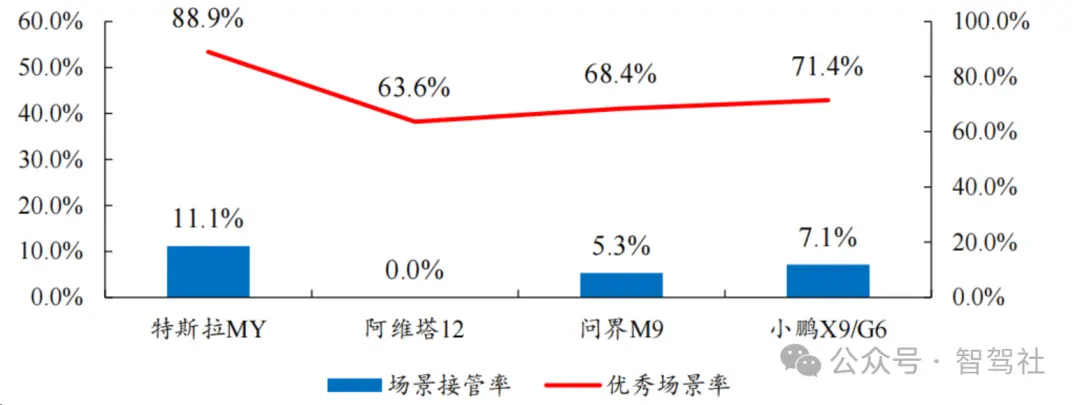
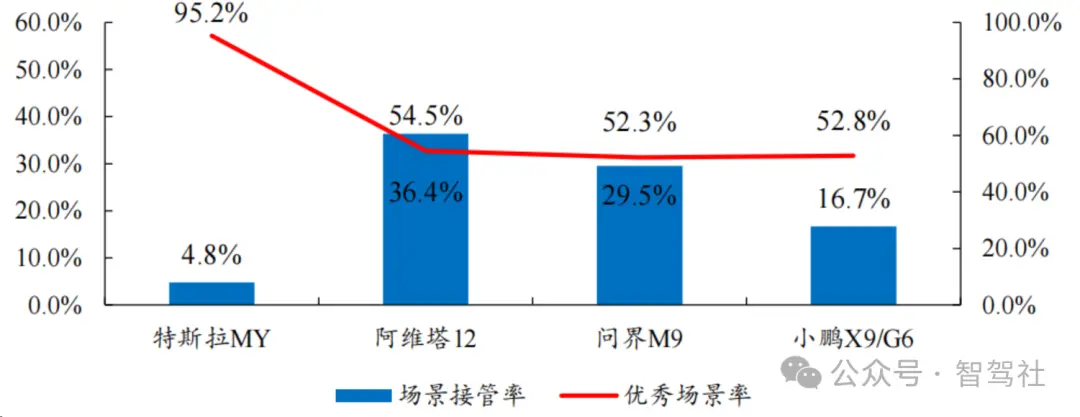
小鹏避让前后方车辆时相对保守,安全空间较大,而对侧向车辆距离保留较小。
从数据上看,小鹏在避让/绕行场景中的接管率相较华为系更低,原因在于其会主动保留较大的前车距离,在后续行动中有较大的操作空间。但是从北京和上海的 X9的测试中,小鹏对侧后方来车的识别较弱,均出现未及时避让的情形。
3.3.4、 多车道场景:汇流分流场景表现均较为优异,加塞场景仍是难点
- 下一篇:向新而行,海克斯康进博之旅即将开启
- 上一篇:新能源汽车控制系统中的电压环



编辑推荐




最新资讯
-
imc/GRAS/AP首次联袂亮相ATE India 盛会
2025-04-11 13:49
-
GB/T 31486-2024 与 GB/T 31484-2015 修改
2025-04-11 13:48
-
标准介绍丨ASAM ARTI 运行实时接口
2025-04-11 10:29
-
自动驾驶中基于深度学习的雷达与视觉融合用
2025-04-11 10:25
-
标准研究丨《汽车开闭件性能要求和试验方法
2025-04-11 10:24
