




 广告
广告





















































新能源汽车车载系统中PID控制的应用

一、概述
PID控制是一种常用的反馈控制系统,在工业自动化和许多其他领域都有着广泛的应用。它通过计算比例(Proportional)、积分(Integral)、微分(Derivative)三个控制项的加权和来调整控制器的输出,从而达到控制目标的目的。在新能源汽车的车载系统中,PID控制常被应用于如电机转速控制、电池温度管理、车辆稳定系统等方面。
二、PID基本原理
PID控制器的输出u(t)可以表示为:

其中:e(t)=r(t)-y(t),表示期望信号与实际信号之间的差值,Kp是比例增益,Ki是积分增益,Kd是微分增益。其实现原理如下所示:
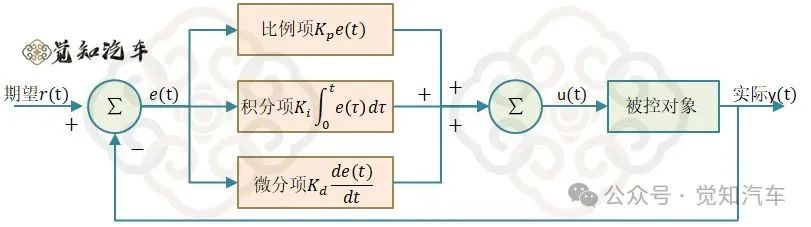
图1 PID原理
对不同控制项释义如下:
1)比例项(P):比例项直接反映了误差的大小,它的作用是提供一个与误差成正比的控制作用。在系统控制中,对该项的调整可快速响应系统误差的变化,但它无法消除稳态误差,即当系统中仅存在比例控制时,系统输出将存在稳态误差。
2)积分项(I):积分项的作用是随着时间累积误差,并且逐渐增加对此累积误差的控制作用,直到消除此稳态误差。当系统在进入稳态后,即使仅存在很小的误差,但随着时间的增加,此误差也会增大,此时系统中就必须引入该积分项对此累积误差进行控制,因此通过对该控制项的调整,可在实现零稳态误差方面起到关键作用,但过多的积分作用可能会导致系统不稳定或响应变慢。
3)微分项(D):在控制系统中,常会存在会在具有较大惯性的组件或具有滞后性的组件,这些组件的状态变化总是落后于系统误差的变化,因此对误差调控具有抑制作用。因此为了解决在系统调节过程中可能因此而产生的系统震荡问题,通过引入微分项对误差的变化趋势进行预测,并提前作出反应,从而让可能存在的抑制误差效果不再起到作用。在车载系统中,当被控对象是具有较大惯性或滞后性的组件时(如发动机),微分控制项可有助于在系统调节过程中减少过冲和振荡问题,从而提高系统的响应速度和平稳性。
三、PID参数调整
PID控制器对系统的调控效果很大程度上取决于对参数的选择,通常情况下,这些参数需要通过不断地试验来确定最佳值。在系统的调试过程中,一种常见的流程方法是:先设置较大的比例增益Kp,然后逐渐减小直到系统稳定,接着调整积分增益Ki以消除稳态误差,最后微调微分增益Kd来改善系统的响应速度和平滑度。但由于系统应用的差异,最终需求的输出曲线也不相同,如下图示意,通过PID参数调整实现对目标曲线的拟合。
图2 PID调试示例
而在如发动机系统的调控过程中,由于系统的启动特性,在启动时需转速上冲以实现正常点火,接着转速开始回落最终趋于稳态,此时对于PID的输出曲线需求则与‘开始即稳态’的系统需求不同。对于发动机系统的调试,这里套用一组PID调试常用口诀:“参数整定找最佳,从小到大顺序查,先是比例后积分,最后再把微分加,曲线振荡很频繁,比例度盘要放大,曲线漂浮绕大湾,比例度盘往小扳,曲线偏离回复慢,积分时间往下降,曲线波动周期长,积分时间再加长,曲线振荡频率快,先把微分降下来,动差大来波动慢,微分时间应加长,理想曲线两个波,前高后低 4 比 1。”
基于上述简单对比,在对PID参数的调试中,首先需结合系统特性,然后再有针对性的进行调整。
四、PID在新能源汽车系统中的应用
在新能源汽车的车载系统中,PID控制可被应用于多种场景中。这里通过设计一个简单的闭环控制系统,来实现对电机的转速控制为例。
首先,我们确定系统架构,包含安装在电机轴上的速度传感器用于测量实时转速、基于PID算法的控制单元、可根据控制器输出指令对电机的电流/电压进行调整的电机驱动电路以及被控对象电机本身。
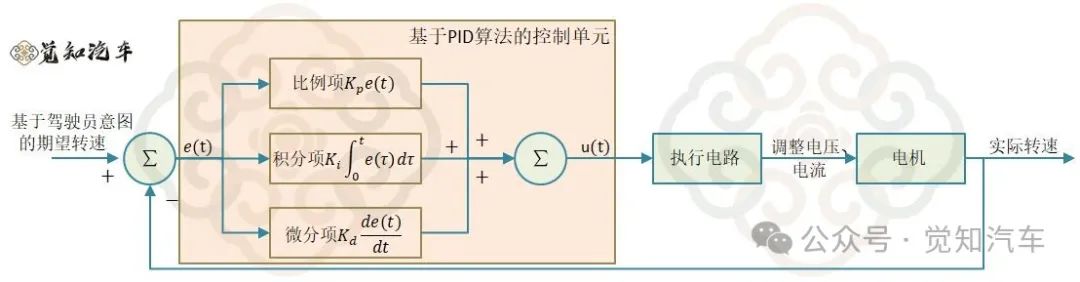
图3 基于PID的电机转速控制系统架构
接着,确定系统控制流程,即系统接收来自加速踏板的信号指令以解析驾驶员意图后,将需求的期望转速输入该闭环系统中,过程中速度传感器持续监测电机的实时转速,然后控制算法基于期望转速与实际转速计算信号差,即e(t)。基于信号差,PID控制器输出u(t),并将结果转换为电机驱动电路的控制信号,进而调整电机的供电状态。通过电机状态的调整,再次进行误差计算,从而重复上述流程,直到误差趋于0,系统趋于稳定。
如电机在某一时刻的转速为9000r,此时系统需求的转速为12000r,那么此初始时刻的转速差将为e(0)=3000r,此时基于误差的PID输出为u(t)=3000Kp+0*Ki+0*Kd。基于此输出结果,电机运行状态将被调整,以快速接近目标转速。随着时间的累积,若在某时刻转速达到11000r,那么此时的e(t)=1000,此时的u(t)则为:

系统重复此动作形成闭环,从而让实际转速不断接近目标需求。
然后,为了让系统具有良好的控制效果,需要对该系统的PID参数进行调整,此基本参数调整过程为:
1.初步设定:根据电机特性和经验数据,初步设定PID参数初始值:Kp=1,Ki=0,Kd=0。
2.比例增益调整:增大Kp直到系统出现振荡,记录临界振荡点的Kp和振荡周期T,然后根据临界比例法,调整Kp为临界值的一定比例,如 0.6* Kp。
3.积分增益调整:暂定Kp值后,开始逐步增大Ki,并观察系统是否出现过冲和长时间振荡,若有则调整Ki使系统在一定时间内消除稳态误差而不引起显著过冲。
4.微分增益调整:增大Kd来减少过冲和提高响应速度,但需注意不要过度增大Kd,以免引入不必要的噪声敏感性。
重复微调参数组合,以使系统具有更换的控制效果。最后,通过静态、动态等测试,以确保系统可满足预设目标下的不同工况需求。
在车载系统的应用中,除电机控制外,在对热管理系统、能量回收系统等的控制上,PID控制器也起到了重要作用。
- 下一篇:ARM架构详解
- 上一篇:采埃孚(ZF)在英国开设800V实验室



编辑推荐




最新资讯
-
风噪测试在电动汽车时代的关键作用
2025-04-29 11:34
-
汉航车辆性能测试系列之操纵稳定性测试--汉
2025-04-29 11:09
-
新能源汽车热管理系统验证体系PITMS正式发
2025-04-29 11:09
-
试验载荷谱采集
2025-04-29 11:07
-
APx500 软件演示模式 (Demo Mode) 竟有这些
2025-04-29 08:37
