




 广告
广告





















































一文讲清全球定位系统GPS

1.GPS与DGPS概述
2.GPS定位原理
3.GPS定位误差
4.DGPS定位原理
5.位置差分
6.伪距差分RTD
7.载波相位差分RTK
1.GPS与DGPS概述
我们在陌生的地方迷路了,通常会打开手机上的地图软件来看一下自己在哪、目的地在哪、该怎么走。自动驾驶汽车要想自己跑起来,首先也要知道自己在哪。来确定自己在哪的过程通常就会用到GPS这项技术,今天我们就来学习一下GPS、DGPS的工作原理。

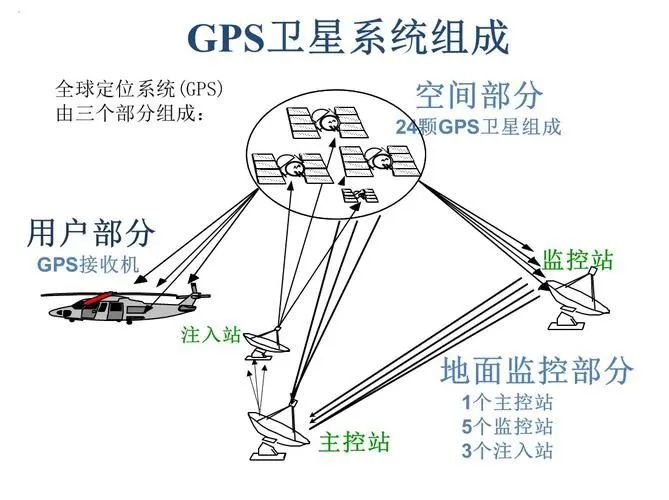
全球定位系统(Global Positioning System,简称GPS),是一种以人造地球卫星为基础的高精度无线电导航的定位系统,它在全球任何地方以及近地空间都能够提供准确的地理位置、车行速度及精确的时间信息。
世界上正在全球范围运行服务的卫星导航系统一共有四个:美国的全球定位系统(GPS)、俄罗斯的格洛纳斯卫星导航系统(GLONASS)、欧盟的伽利略卫星导航系统(Galileo)和中国的北斗卫星导航系统(BDS)。其中,全球定位系统(GPS)发展最早,成熟度最高,商业应用开发最深入。
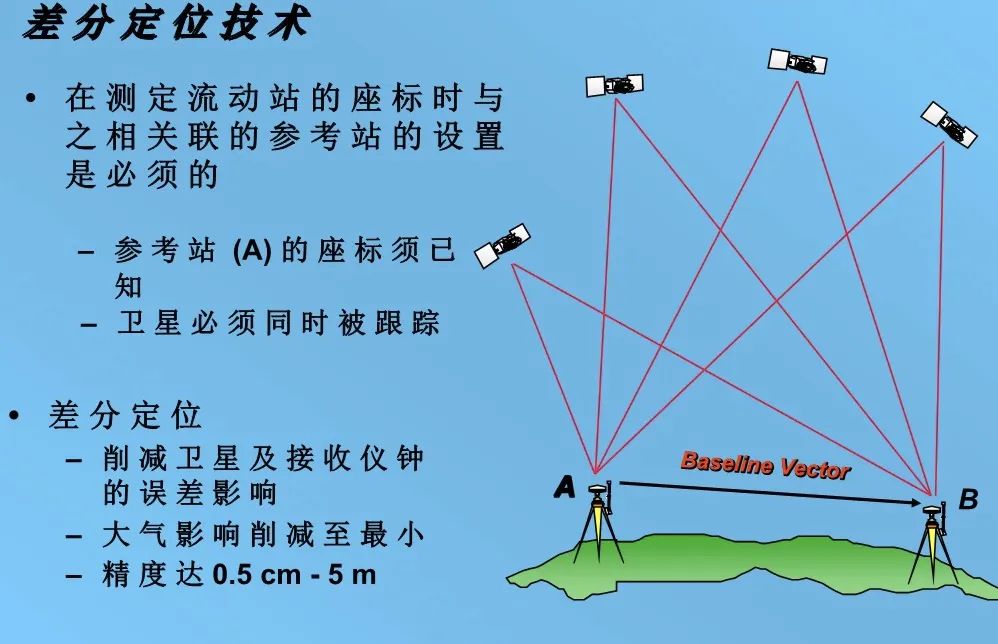
差分全球定位系统(Differential Global Position System,简称DGPS),是在GPS的基础上利用差分技术使用户能够从GPS系统中获得更高的精度。DGPS借助了地面上已知坐标的GPS接收器基站,转发GPS差分信息。车辆同时接收GPS卫星和GPS差分基站的信号,得出当前的自身高精度坐标。
2.GPS定位原理
接收设备测得与三颗卫星的距离分别为 R1、R2、R3,以各卫星位置为球心测量距离为半径,绘制三个球,其交点即为接收设备的位置。根据最小二乘算法计算接收设备的估计位置,假设接收设备的坐标为 (x,y,z),N颗卫星的位置坐标为 (xi,yi,zi),由几何关系可得:
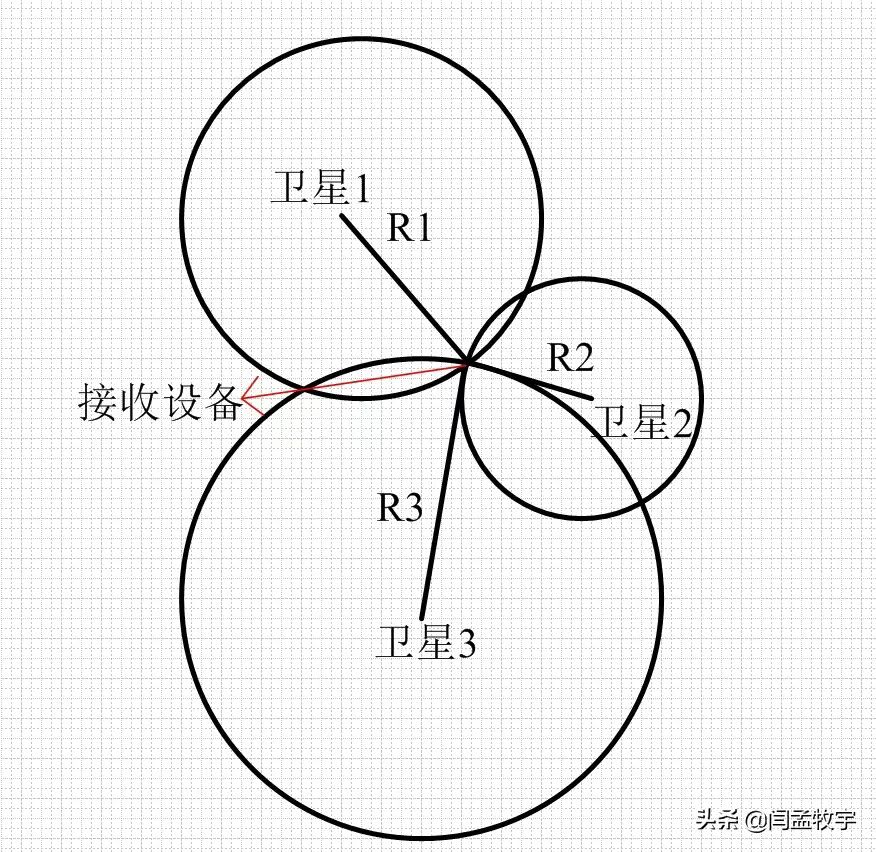
3个球面相交成一个点,三个方程组、三个未知数,3个距离段就可以确定接收设备的纬度、经度和高度坐标。
在实际应用中,卫星与接收设备之间的距离R是通过信号的传播时间差Δt乘以信号的传播速度v得到的。其中,信号的传播速度v接近于真空中的光速即C=299792.458km/s (一般取300000km/s),量值非常大。因此,这就要求对时间差Δt进行非常准确的测定,如果稍有偏差,那么测得的卫地距离就会谬以千里。
而时间差Δt是通过将卫星处测得的信号发射时间ts与接收机处测得的信号达到的时间tr求差得到的。其中,卫星上安置的原子钟,稳定度很高,我们认为这种钟的时间与GPS时间吻合。接收机处的时钟是石英钟,稳定度一般,我们认为它的时钟时间与GPS时间存在时间同步误差,并将这种误差作为一个待定参数。这样,对于每个地面点实际上需要求解的就有4个待定参数,因此至少需要观测4颗卫星(为保证结果独一,4颗卫星不能在同一平面)至地面点的卫地距离数据。
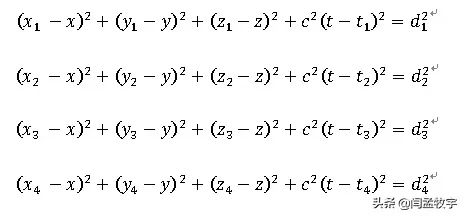
求解未知数:(x,y,z,t)。x,y,z用于定位,t用于定时。
3.GPS定位误差
在GPS定位过程中,存在着以下三部分误差。
第一部分是对每一个接收机所公有的(完全可以消除),例如:SA误差(美国军方为了限制非特许用户利用GPS进行高精度点定位而采用的降低系统精度的政策,简称SA政策,它包括降低广播星历精度的ε技术和在卫星基本频率上附加一随机抖动的δ技术)、电离层延迟、大气层延迟、星历误差、卫星钟误差等。
第二部分为不能由用户测量或由校正模型来计算的传播延迟误差(大部分可以消除)。
第三部分为各用户接收机所固有的误差(无法消除),例如:内部噪声、通道延迟、多径效应等。

因为存在着上述三种误差,GPS定位精度只能保证在10米以内,这个精度可以满足人们日常的使用,但是在自动驾驶中是远远不够的。自动驾驶需要厘米级的高精度定位,这时候就需要用到DGPS定位技术来消去公共的误差源 ——卫星轨道误差、卫星钟差、大气延时、多路径效应、SA等。
4.DGPS定位原理
在位置已精确测定的已知点上配备一台 GPS 接收机作为基准站并和用户同时进行 GPS 观测,将得到的单点定位的结果与基准站坐标比较,求解出实时差分修正值,以广播或数据链传输方式,将差分修正值传送至附近 GPS用户,以修正其GPS定位解,提高其局部范围内用户的定位精度。
DGPS分类:根据差分GPS基准站发送的信息方式可将差分GPS定位分为三类,即:位置差分、伪距差分(RTD)和载波相位差分(RTK)。这三类差分方式的工作原理是相同的,即都是由基准站发送修正数据,由用户站接收并对其测量结果进行修正,以获得精确的定位结果。所不同的是,发送修正数据的具体内容不一样,其差分定位精度也不同。
DGPS基础:利用差分定位方法可以将用户的实时单点定位精度提高到米级。 能够应用这种方法的基础是: 在同一地区内,影响 GPS 实时单点定位精度的因素,如大气层延迟误差、卫星星历误差、卫星钟误差等,对基准站及其邻近用户的影响是相同或相近的。
5.位置差分
位置差分法是一种最简单的差分方法,任何一种GPS接收机均可改装和组成这种差分系统。它利用安置在基准站上的基准接收机,对4颗及以上的卫星进行观测,解出基准站的坐标(X1,Y1,Z1),再根据基准站的已知精确坐标(X0,Y0,Z0)求解基准接收机的定位误差改正数(△X,△Y,△Z)。
基准站利用数据链将其发播给用户接收机,用户接收机利用该改正数修正用户接收机的定位结果。
最后得到的改正后的用户坐标已消去了基准站和用户站的共同误差,例如卫星轨道误差、 SA影响、大气影响等,提高了定位精度。

为了提高定位精度,用户接收机进行位置修正吋,需将传送时延因素考虑进去:位置差分法的优点是传输改正数少、计算方法简单、任何一种卫星导航接收机均可改装成差分定位系统,不足是要求基准接收机与用户接收机必须同步观测同一组卫星、差分精度随基准接收机到用户接收机间的距离的增加而降低以及其差分精度低于伪距差分等。位置差分法可以将精度提高到米级,适用于用户与基准站间距离在100km以内的情况。
6.伪距差分RTD
伪距差分(Real Time Differential RTD):利用基准接收机的已知坐标解算基准接收机至各导航卫星间的距离。并将其与含有误差的伪距测量值进行比较,然后通过滤波算法等数据处理算法解算出各卫星的伪距误差,再将所有卫星的伪距误差发播给用户接收机。用户接收机利用此伪距误差来改正测量的伪距,进而利用改正后的伪距求解自身的三维坐标, 就可消去公共误差,提高定位精度。
伪距差分是目前用途最广的一种技术。几乎所有的商用差分GPS接收机均采用这种技术。国际海事无线电委员会推荐的RTCM SC-104也采用了这种技术。
伪距差分的优点:基准接收机提供所有卫星的伪距误差,用户接收机观测任意4颗以上导航卫星就可完成精确定位,无需进行坐标变换。
伪距差分的缺点:与位置差分相似,伪距差分能将两站公共误差抵消,但随着用户到基准站距离的增加又出现了系统误差,这种误差用任何差分法都是不能消除的。用户和基准站之间的距离对精度有决定性影响。利用伪距差分方法,定位精度可达到亚米级。
6.载波相位差分RTK
载波相位差分技术又称之为RTK技术(Real Time Kinematic):与伪距差分原理相同,由基准站通过数据链及时将其载波观测值及基准站坐标信息一同传送给用户站。用户站接收GPS卫星的载波相位与来自基准站的载波相位,并组成相位差分观测值进行及时处理,能及时给出厘米级的定位结果。
什么是载波?
载波,根据名字就能大致了解它的含义,载是运载的意思,波就是电波的意思,当然这里要运载的是卫星的信号,合在一起就是:可运载调制信号的高频率震荡波,称之为载波。
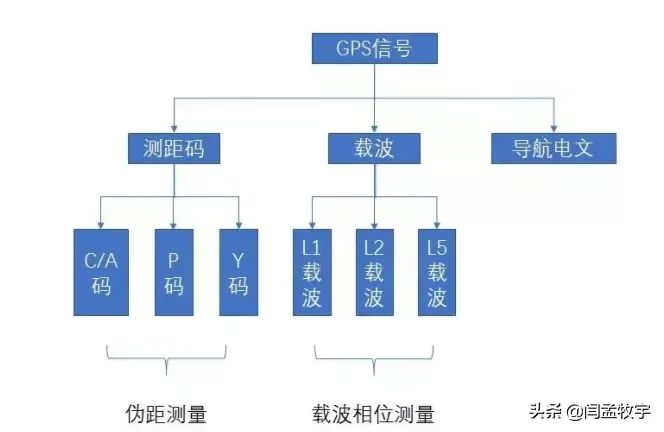
以GPS系统为例,GPS卫星发射的信号由载波、测距码和导航电文三部分组成。载波和测距码用来进行距离测量,导航电文包含了卫星星历、卫星钟的改正参数。
为什么伪距测量比载波相位的精度低?
因为伪距测量是以测距码作为量测信号的,而采用码相关法时,测量精度是码元宽度的百分之一,由于测距码的码元宽度较大(精码码宽为30m,C/A码码宽为300m),所以导致测量精度不高,只能做到30~300cm。
码宽计算:码宽=光速÷码频率,光速为300000000m/s,C/A码的码频率为1.023Mhz,码宽为300m;精码的码频率为10.23Mhz,码宽为30m。
而载波的波长则要短上很多( 19.0cm/24.4cm/25.5cm) ,把载波当做测距信号进行相位测量,就能达到很高的精度。
载波作为运载卫星信号的载体(苦力劳动),而测距码也包含在卫星信号里,说明载波是给测距码当运输工具的,作为运输工具的载波的精度要比测距码还要高,真的是英吹思婷。
使用载波时的缺点:会出现周跳与整周模糊度的问题。周跳,是因为由于卫星信号的失锁而导致的整周计数的跳变或中断,导致观测值不精确。整周模糊度是因为载波是一个没有任何标记的余弦波,接收机内的鉴相器只能测定不足一周的部分,对产生的整周数不确定。这个问题就需要考验看各厂商的测量软件对整周技术的计算能力了。
卫星到地球的距离=载波的波长λ*相位差,载波相位测量实际就是以波长λ作为长度单位,以载波作为一把“尺子”来测量卫星至接收机间的距离。
RTK是一种利用GPS载波相位观测值进行实时动态相对定位的技术,关键词:实时、动态和相对定位。
传统RTK由2台GPS接收机(一台作为基准站一台或多台作为移动站)、数据通信链(电台等)和测量软件组成。GPS误差会随参考站和移动站距离的增加而逐渐失去线性,在较长距离下(单频>10km,双频>30km),经过差分处理后的用户数据仍然含有很大的观测误差,从而导致定位精度的降低和无法解算载波相位的整周模糊。
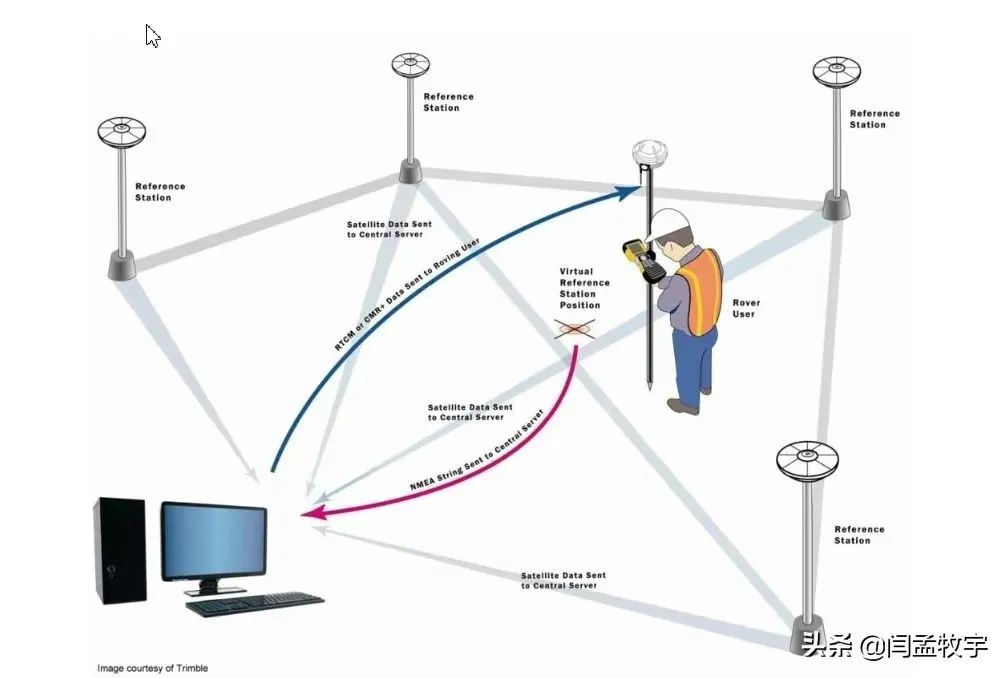
在20世纪90年代中期,人们提出了网络RTK技术。通过多个参考站组成的GPS网络来估计一个地区的GPS误差模型,并为网络覆盖地区的用户提供校正数据,用一个虚拟参考站的数据,为用户提供距离自己位置较近的某个参考网格的校正数据,因此网络RTK技术又被称为虚拟参考站技术(Virtual Reference)。
近些年随着技术的发展,RTK技术早已由传统的1+1或1+2发展到了广域差分系统WADGPS,有些城市建立起CORS系统,有的公司也自己建立了CORS系统,例如中国移动CORS、千寻CORS,这就大大提高了RTK的测量范围,解决了传统RTK距离限制的问题。
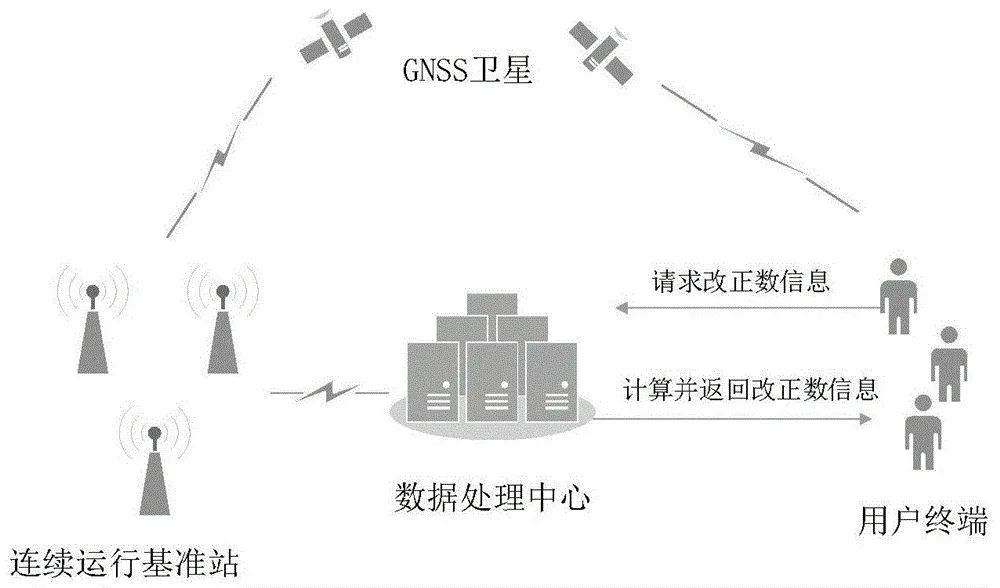
连续运行参考站系统(Continuously Operating Reference Stations CORS):是利用多基站网络RTK技术建立的连续运行(卫星定位服务)参考站系统,由基准站网、数据处理中心、数据传输系统、定位导航数据播发系统、用户应用系统五个部分组成,各基准站与监控分析中心间通过数据传输系统连接成一体,形成专用网络。
CORS的优势:
1)改进了初始化时间、扩大了有效工作的范围;
2)采用连续基站,用户随时可以观测,使用方便,提高了工作效率;
3)拥有完善的数据监控系统,可以有效地消除系统误差和周跳,增强差分作业的可靠性;
4)用户不需架设参考站,真正实现单机作业,减少了费用;
5)使用固定可靠的数据链通讯方式,减少了噪声干扰;
6)提供远程INTERNET服务,实现了数据的共享;
7)扩大了GPS在动态领域的应用范围,更有利于车辆、飞机和船舶的精密导航;
8)为建设数字化城市提供了新的契机。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
