




 广告
广告





















































通过学习轮胎模型利用3分钟数据实现自主漂移

编者按:该会议论文提出一种可学习的轮胎模型,利用神经网络的非线性学习能力提高了车辆在接近附着极限的工况下的轨迹跟踪能力,是数据驱动方法应用在车辆控制领域的一个新的尝试,并通过实车验证了该轮胎模型的有效性,不仅是对轮胎动力学非线性建模的一大发展,更显示了数据驱动方法对传统动力学控制领域的潜力。
本文译自:
《Autonomous Drifting with 3 Minutes of Data via Learned Tire Models》
文章来源:
2023 IEEE International Conference on Robotics and Automation (ICRA),29 May 2023 - 02 June 2023
作者:
Franck Djeumou1,Jonathan Y.M. Goh2,Ufuk Topcu1,Avinash Balachandran2
作者单位:
1 the University of Texas at Austin, Austin,TX, USA.,
2 Toyota Research Institute, LosAltos, CA,USA .
原文链接:
https://doi.org/10.1109/ICRA48891.2023.10161370
摘要:在接近附着力极限时,轮胎和地面接触产生的力存在非线性和复杂的耦合特点。特别是需要高附着力的紧急场合,在临近附着极限的区域内建立高效准确的车辆模型对提高安全性至关重要。为此,我们提出了一系列基于神经常微分方程和神经-ExpTanh参数化的新型轮胎力模型。这些模型的设计既能满足车辆物理动力学假设,又具有足够的保真度,可直接从车辆状态测量中捕捉高阶效应。所提出的轮胎模型可以在现有的非线性模型预测控制框架中即插即用,替代分析性刷子轮胎模型。使用定制的丰田** **Supra 进行的实验表明,不到三分钟的少量驾驶数据足以在各种轨迹上实现高性能的自主漂移,时速可达45 英里/小时。使用所提出的可学习轮胎模型与基准模型相比,跟踪性能提高了4倍,控制输入更加平滑,计算时间更快、更具有一致性。
Ⅰ 引言
最大程度的使用轮胎力对于安全处理高度动态的情况至关重要,例如紧急避障。然而,准确预测汽车四个轮胎上产生的有效力是一个巨大挑战。首先,轮胎有许多复杂的非线性特性,包括轮胎力饱和、侧偏特性以及依赖于非线性负荷。实际上,已经投入了大量的努力来开发单个轮胎的机理和经验模型[1–7],包括在工业中经常使用的“魔术公式”[1]。尽管它很受欢迎,但拟合“魔术公式”的许多参数是困难的,通常需要专门的测试和设施[2,3]。
当轮胎连接到车辆时,其复杂性会增加,因为这些模型的每个输入都与悬架动力学、载荷转移和其他效应耦合在一起。许多文献中采用的控制方法都对车辆进行单轨假设,将这些效应“集成”到前后轴的单个轮胎模型中[8–13],并通过实车数据进行经验拟合。这包括Fiala刷子模型[14],该模型已在自动驾驶车辆控制场景中得到实验验证,包括紧急避障、漂移和赛车[15–20]。尽管这种简化有利于控制器的开发,但这种集成的单轮胎往往无法准确捕捉由高阶效应产生的复杂耦合特性。
神经网络,由于其在极端情况下具有通用逼近的性质,可能提供了一个解决方案。在文献中,基于黑盒和魔术公式的神经网络模型[4–7,21–23]已经被开发。然而,它们没有保证物理约束,并且没有在接近或处于操控极限的整车上进行测试。一般来说,它们的复杂性必须在过拟合和计算效率之间进行平衡,尤其是在需要可靠的、具有物理意义的外推以实现实时控制时。
我们的第一项贡献是将轮胎模型的物理特性与神经网络的建模能力结合起来。我们提出了一系列新颖的基于神经常微分方程(NODE)[24,25]和neural-ExpTanh轮胎力模型,其是一种新颖的参数化方法,使用指数和正切函数生成相应曲线。这些模型旨在追求具有高拟合保真度的同时,融入基本的轮胎模型特性,包括摩擦椭圆约束和“S形”饱和趋势。NODE模型定义了一个微分方程,其解包括已建立的模型,如魔术公式[1]和Fiala刷子模型[14]。通过基于优化的技术[23]、[26],模型被训练以用于测量车辆状态。为了解决训练和评估NODE模型的计算复杂性,这需要积分一个微分方程,我们还引入了神经-ExpTanh,其是NODE模型解的一个子集。由于其低廉的函数和梯度计算时间,可以高效地训练神经-ExpTanh模型,并且进行精确地实时控制。
我们的第二项贡献是在一辆全尺寸、重度改装的丰田Supra上对这些NODE和ExpTanh模型进行了广泛的实验评估。我们首先将我们的模型与基于车辆数据集的魔术公式和Fiala模型进行了比较。结果显示,NODE和ExpTanh满足轮胎基本原理,同时在零均值预测误差周围的密度达到了基准的两倍。然后,我们将这些学习到的模型作为分析刷子轮胎模型的替代品,用于现有的非线性模型预测控制框架[16,27]中。这些模型在两个不同的轨迹上进行了自动驾驶漂移实验并进行了比较,这些轨迹一致地激发了非线性状态。与基准相比,其结果显示出更好的跟踪性能、更少的转向振荡和更低的计算时间。
最后一组实验展示了我们模型的数据效率和泛化能力。我们更换了一组不同的轮胎,收集了3分钟的手动驾驶数据,训练一个ExpTanh模型仅用了几秒钟,然后进行了八字形的自动驾驶漂移实验,如图1所示。学习到的模型显示出同样良好的闭环性能,而基准模型的性能下降了。

图1 这幅光复合材料展示了来自无人机视频的静帧,记录了一个完全自主实验,画面以1秒间隔叠加。每一帧捕捉了实验过程中的关键时刻,展示了系统在不同阶段的表现和反应,提供了对自主驾驶能力的直观理解。
Ⅱ 理论基础
车辆动力学。 本文使用的车辆动力学模型为平面单轨模型[8,10–12],如图2所示。它们在一个曲线坐标系[15,18,19]中表达,其中车辆的位置是相对于参考轨迹的。位置坐标由沿路径的距离、相对于规划路径的偏航角和横向偏差描述。运动状态的动力学约束为,其中矩阵具体形式见文献。状态、、和分别表示横摆角速度、车速、侧滑角和前/后轴转速。控制量 代表转向角和作用在前/后轴上的力矩。此外,、、和分别定义了前轴纵向、前轴横向、后轴纵向和后轴横向轮胎力。在后续讨论中,我们使用和分别指代和,下文分析时会省略下标。
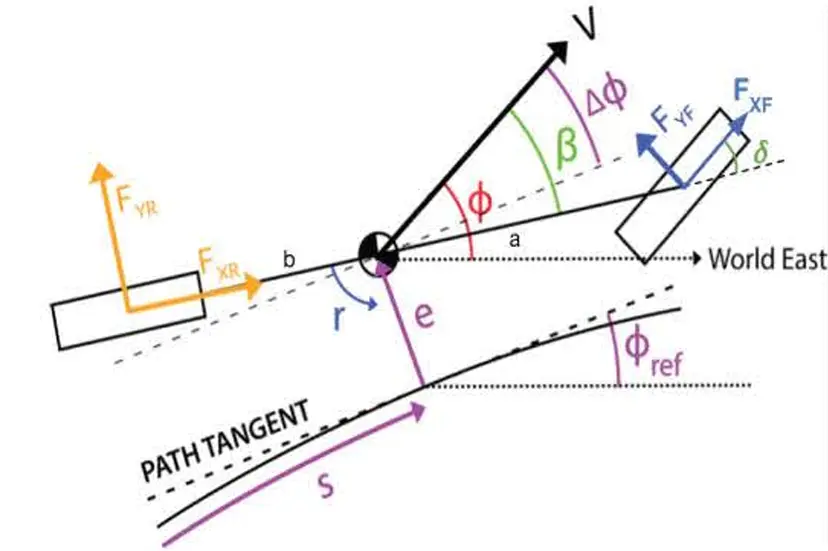
图2 给定参考轨迹上的单轨模型
轮胎力基本原理。 对非线性轮胎力和的建模已有大量的研究。许多模型认为这些力是由轮胎与路面接触面之间的相对“滑移”产生的。侧偏角、纵向滑移比和总滑移通常用作轮胎力的模型输入,如式子(1)所示:
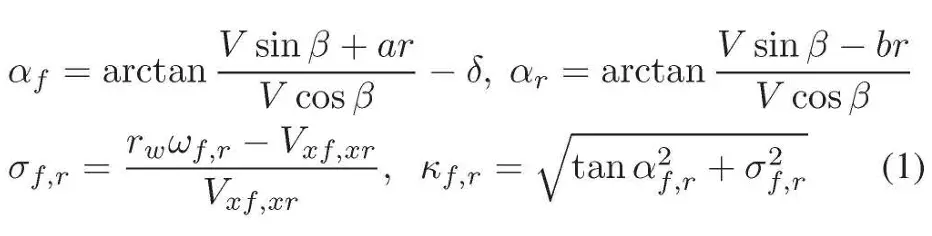
其中,,是车轮的有效半径,和分别是从质心到前后轴的距离。考虑非负,满足,同时由于的非负性,。
轮胎力的测量。 在这项工作中,我们从测量到的状态量和集中到车轴上的力的估计值学习轮胎模型。虽然估计这些力有很多方法,本文为了简化问题,假设,即前轮不产生扭矩的情况,我们从测量的状态量计算,和,然后通过矩阵反推得到估计力,用表示[15]。
Ⅲ 基于物理信息的轮胎力学习模型
在本节中,我们将介绍所提出的基于物理的神经常微分方程(NODE)模型及其推导出的ExpTanh参数化方法。遵循轮胎建模的惯例,我们将讨论分为纯滑移与组合滑移两种工况。在纯滑移工况下,轮胎仅沿单一轴向产生力(即纵向滑移比或);在组合滑移工况下,轮胎同时产生纵向力与侧向力(即滑移率且侧偏角)。根据轮胎基本理论,我们预期所建立的模型具有以下行为特征,具体总结见图3。
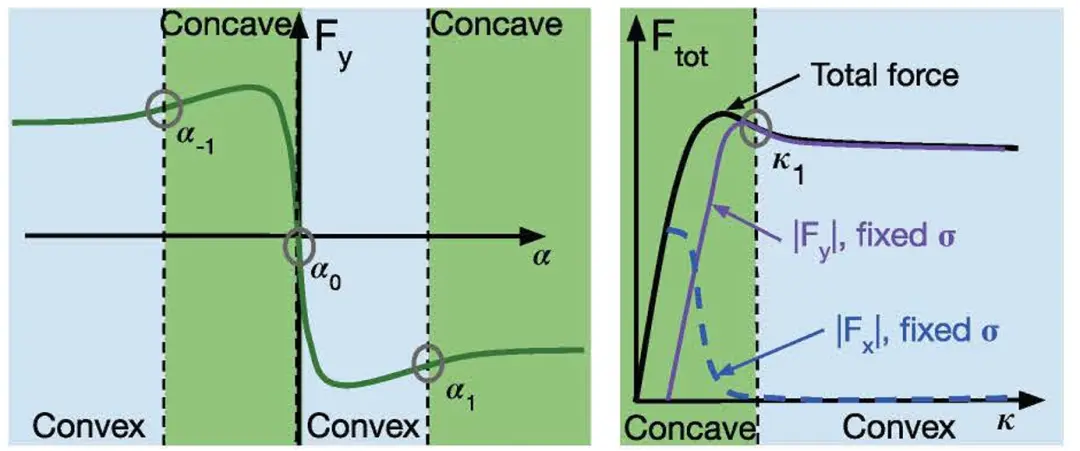
图3 左侧图示展示了纯滑移状态下的拐点 () 及其对 () 的凸性/凹性的变化。右侧图示则展示了组合滑移状态下的总力 () 的拐点 ()。
标准化的S形曲线。 随着滑移率或侧偏角的绝对值增大,轮胎力的大小也随之增大直到达到一个峰值,随后轮胎与地面的接触区域开始滑动。在峰值点之后,力减小,整个曲线呈“S”形。在纯滑移工况下,输入的滑移量是滑移率或侧偏角。在组合滑移工况下,输入的滑移量是滑移率和侧偏角的组合,输出的力为。
组合滑移工况。 对于组合滑移,总力的各分量按照侧偏角与纵向滑移相在组合滑移工况下所占比例进行分配。如图3所示,例如,在固定滑移率的情况下,随着侧偏角从0逐渐增大,纵向力的比例减少而侧向力的比例增加直至饱和。
摩擦的限制。 在这两种状态下,最大附着力受到轮胎与路面之间最大附着能力的限制,其中是摩擦系数,是施加在轮胎上的垂直载荷。由于摩擦系数依赖于路面、轮胎方向和垂直载荷,而垂直载荷又因车辆状态(如重心转移和悬挂动态响应)而变化,因此很难精确确定。然而,最大附着力的这一概念极大地简化了控制和安全分析。
在本文中,我们假设一组给定的测量值,其中是对额定载荷的粗略估计,而则代表了关于的任何可用信息。
A. 基于物理的轮胎力模型NODE
我们寻求一个能够满足这些物理特性的通用模型。首先,对于特征的"S形"曲线,我们不是直观地选择一条符合"S形"的曲线,例如魔术公式,而是使用凸性、凹性和拐点等概念来描述一系列物理上可行的曲线族。随后,我们通过随机梯度下降法优化该曲线族中的函数,使其最佳地拟合数据。
具体而言,在关键拐点处(见图3),曲线会改变其凸性或凹性。在纯滑移状态下,包含三个拐点。对于我们需要的曲线族,应该使得其对于所有的和,呈现凸性,而在其他情况下则呈现凹性。同样地,对于,在参数下也有相同的性质。在组合滑移状态下,的曲线族包含一个拐点,使得呈现凹性,而在其他情况下则呈现凸性。凸性和凹性分别对应于非负和非正的二阶导数。因此,主要思路是在施加所需的凸性/凹性属性的同时,学习轮胎力相对于相应滑移的拐点和二阶导数;力则是通过积分获得的。此外,我们还根据摩擦极限的要求对峰值力施加软约束。
纯滑移NODE模型。 侧向力是二阶微分方程的解:
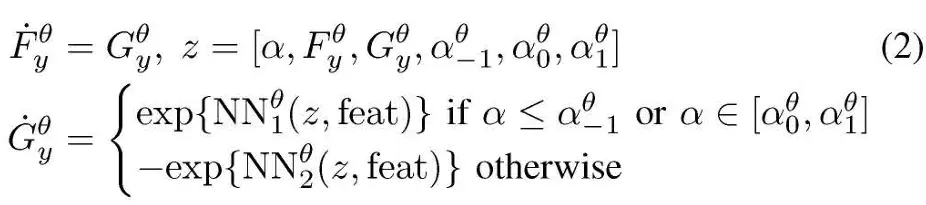
其中,微分是通过对 进行求导得到的。对于前轴,用于学习的特征集为 ,对于后轴为 。我们选择特征集 以确保在给定固定的 时,由式(1)给出的 并不唯一。 表示一个神经网络,其中 是模型的所有参数集合。拐点可以参数化为 ,其中 , 是在对微分方程积分时使用的初始状态。需要注意的是,在 中需要选择指数函数强制执行非负和非正的二阶导数约束。随后,我们通过求解以下优化问题来计算参数 。
其中, 是从 到测量的 在 初始条件下的积分。 一项通过惩罚超过估计名义载荷的值 作为软约束确保系统不超过摩擦力极限。超参数 指定了对 的置信度:较低的值 允许峰值力根据数据进行调整,而较高的值 则限制峰值力不超过 。
组合滑移 NODE 模型。 合力 是如下所示二阶微分方程的解:
其中,微分通过对组合滑移 求导得到。,再次选择特征集 ,以确保侧偏角 和纵向滑移率 不是定值。接下来,为了了解这一合力的分量分布,我们定义 ,并通过如下方式按比例缩放 来估计 和 :

因此,可以通过求解如下问题来求解参数 :
其中,被测量的合力为
注释 1:在纯滑移状态下,学习 和学习 的方式相同,只需将 替换为 。尽管 NODE 公式化能够编码丰富的函数类,但求解方程(2)和(4)以估计力的过程会减慢训练速度,并妨碍该公式化在控制中的直接应用。实际上,我们通过首先学习参数 ,然后训练一个新的神经网络来模仿方程(2)和(4)的解,以此解决这一问题。这样,评估所获得的神经网络及其雅可比矩阵在实时控制中就变得计算成本低廉。
B. ExpTanh: 一个新的轮胎模型族
我们限制 NODE 模型的解集到一类特定的函数族,即 ExpTanh,这类函数在无需积分微分方程的情况下即可满足二阶导数条件。ExpTanh 曲线由下式给出:

其中 是常数或神经网络函数,满足 。最重要的是,可以通过解析式的方式得到 :

ExpTanh 纯滑移模型。 我们将 建模为 ,其中 ,与 NODE 版本中的特征 相同,且 是所有参数的集合。实际上,我们通过指数函数传递 同时确保非负值。最优参数 由以下方式给出:
其中第二项是对超过估计的最大摩擦力的软约束。
ExpTanh 组合滑移模型。 我们将总力建模为 ,其中 ,并且 与 NODE 版本中的特征 相同。和 取决于等式(5)给出的总力 ,其中函数 , 需要学习得到。特别的,我们可以通过计算下式得到 :
注释 2:首先,通过结合选定的测量状态子集 以及滑移值,所提出的模型能够捕捉有效综合轮胎力曲线与车辆运动之间的复杂耦合关系。虽然我们为选择了特定的组合,但根据车辆的不同,其他选择也可能适用。其次,对于固定的参数 ,ExpTanh 仅需两次计算指数函数,相比需要三次计算反正切函数 的魔术公式,其计算成本更低;同时,其梯度也更容易计算。
Ⅳ 实验
我们通过以下多项实验证明了所提出轮胎模型的数据效率、预测准确性和计算效率:在测试平台车辆数据集上与魔术公式和 Fiala 刷子模型的对比实验,以及在自动驾驶在蛇形轨迹和八字形回转轨迹上的自动驾驶漂移实验。
本节中的实验是在文献[26,27]中描述的丰田 Supra 上进行的,并针对高性能自动驾驶进行了大量改装,通过商用 RTK GPS-INS 设备测量车辆状态测量,采集速率为 250Hz。对于这类后轮驱动的车辆,前轮在纯打滑状态下工作,,后轮处于组合滑移区。在未指定单位时,我们假设所有量均为标准单位。
A. 学习型轮胎模型的评价
为了比较轮胎模型,我们使用了人工驾驶和自动驾驶/漂移数据集 (图 4)。整个数据集包含 306887 次状态测量,频率为 100 Hz,在相似的夏季天气条件下,在相同的路面上历时三个月,累计测量时间为 1 小时。
对于 NODE 模型,、 和 有 2 个隐藏层,每层有 16 个神经元,而 每层有 4 个神经元。对于 模型, 和 有 2 个隐藏层,每层有 3 个神经元。所有神经元都使用 tanh 作为激活函数。我们使用 来表示对估计的 的低置信度。我们通过 Adam 优化器[28]对模型进行了训练,学习率设置为指数衰减,衰减率为 0.01,初始值为 0.001。在配备 GeForce RTX 2060 的笔记本电脑上,训练纯滑移 模型和组合滑移 和 模型,NODE 需要 27 分钟,而 模型仅需要 4 分钟。
与魔术公式和 Fiala 模型的对比。魔术公式的参数(第 4 章第 4.3.2 节)是通过优化数据集的均方误差损失获得的。Fiala 模型参数化是通过在现有的自主漂移 NMPC 框架[15,16]中根据经验调整的。图 4 总结了我们的研究结果:与魔术公式和 Fiala 模型相比,所提出的轮胎模型在满足轮胎机理的同时,大大提高了预测精度。NODE 模型的预测准确率最高,但其训练和评估时间明显较长。相比之下,ExpTanh 的预测准确率略低于 NODE 模型,但易于训练和评估。
图 5 显示了学习的 ExpTanh 模型如何有效捕捉与车辆状态横摆角速度 、纵向车速 和侧滑角 的耦合。结果表明,所提出的模型不仅与轮胎特性吻合,还能结合复杂的底盘相互作用(如载荷转移和悬架动力学)。车辆在纯滑移状态下,由于其特定的悬挂设计和由此产生的显著静态与动态侧倾,导致车辆的中心相对于理想曲线中心发生了偏移。这种偏移会影响车辆的操控性和稳定性,尤其在漂移时更加明显。低车速下,曲线趋于平缓,而随着侧滑角 的增大,侧向附着力峰值所对应的滑移角减小。对于组合滑移模型,在低纵向滑移的非线性过渡区域,横摆角速度 和车速 的相互依赖最为显著。按照轮胎基本特性,后轮纵向滑移比 固定, 随着滑移角的增大而减小。
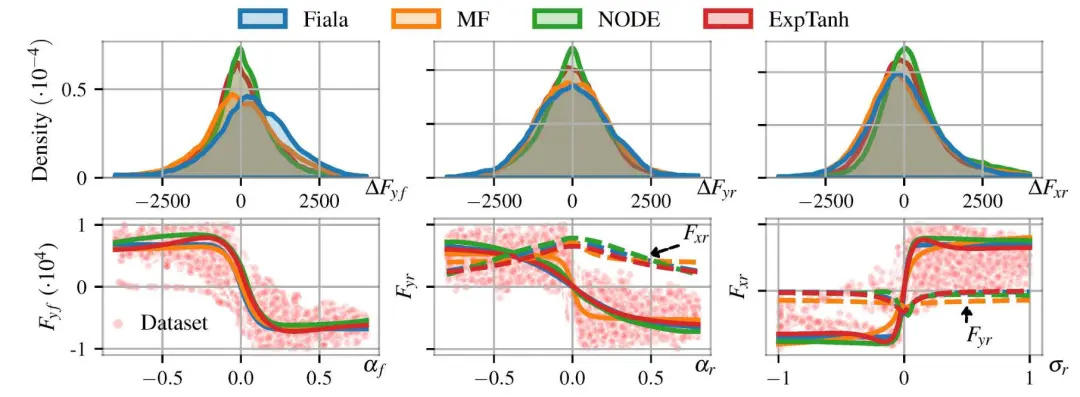
图 4 在实际驾驶数据集上训练和测试的不同轮胎模型的比较。第一行显示的是预测误差的密度分布,第二行显示的是在固定状态横摆角速度 、车速 、侧滑角 下力与滑移值的函数关系,其中 是在 时得到的, 是在 时得到的。在密度图中,NODE 模型和 ExpTanh 模型在零均值误差附近的密度至少是专家设计的 Fiala 模型和魔术公式的 1.5 倍。第二行验证了学习的 NODE 和 ExpTanh 模型满足轮胎基本性质。
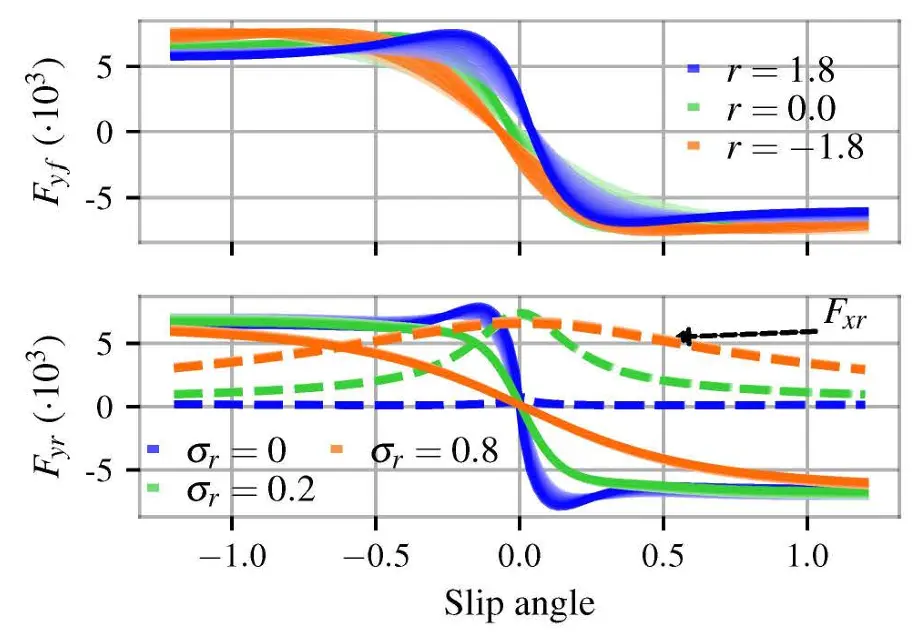
图 5 横摆角速度 、车速 、侧滑角 对学习型 ExpTanh 模型的影响。对于前轮,蓝色曲线对应横摆角速度 ,侧滑角 ,车速 值范围为 5 至 20,较低的值用较浅的颜色表示。绿色曲线和蓝色曲线基本一致,仅侧滑角 。橙色曲线横摆角速度 和车速 固定,侧滑角 在 -0.9 到 0.9 之间变化。对于后轮胎,蓝色曲线的 值范围为 5 至 20, 值固定为 -1.8;绿色曲线的 值范围为-1.8 至 1.8, 值固定为 12;橙色曲线的 值和 值均有变化。
B. 利用学习型轮胎模型的自主漂移实验
为了评估它们的实际闭环性能,我们在图 4 中使用我们学习到的模型直接替换现有自主漂移闭环 NMPC 框架中的 Fiala 模型[16,27]。 参考轨迹是通过基准 Fiala 模型的非线性优化预先计算出来的。 NMPC 成本函数主要包括横向误差 、与参考侧滑角的偏差 以及相对偏差 。侧滑角 决定了漂移的特征和行为。
1) 蛇形轨迹漂移
在第一个实验中,我们比较了基准 Fiala 模型、NODE 模型和 ExpTanh 模型在瞬态蛇形轨迹上的闭环性能(图 6)。集成的 NODE 模型是用使用一个神经网络输出近似。蛇形轨迹的拐角参考侧滑角最大为 43°,速度介于 31mph 和 45mph 之间。图 6 展示了改进后的跟踪性能:就均方根误差而言,ExpTanh 对路径(误差 和偏离 )的跟踪性能比 Fiala 模型高出 3.5 倍,同时侧滑跟踪性能也高出 1.5 倍。NODE 模型的性能略低于 ExpTanh,这可能是由于近似过程中的精度损失。重要的是,与基线 Fiala 模型相比,使用 ExpTanh 和 NODE 时,转向振荡 更少。
2) 利用 3 分钟数据实现自主漂移
这组实验研究了 ExpTanh 模型的通用性。首先,我们使用基准 Fiala 模型和 ExpTanh 模型在八字形轨迹上进行实验。然后,我们将后轮胎从之前所有测试中使用的 Toyo Proxes Sport 275/35R18 换成了 Bridgestone Potenza Sport 275/35R18。一名安全驾驶员随后在滑行平台上手动驾驶车辆,进行不规则抓地力和漂移动作,持续约 3 分钟。随后,这些数据用于训练一个 ExpTanh 模型,该过程在配备 GeForce RTX 2060 的笔记本电脑上耗时不到 15 秒。训练完成后,新模型与基准模型在相同的“8”字轨迹上进行了对比分析。
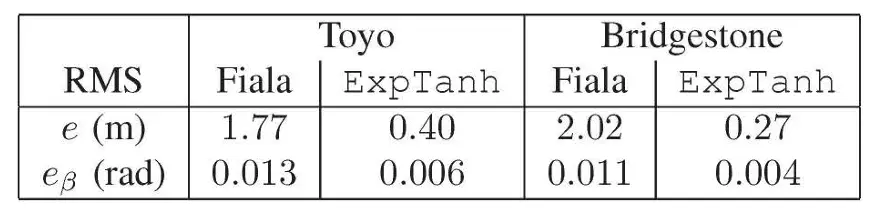
图 7 总结了我们的研究发现。对于原始的 Toyo 轮胎,使用 ExpTanh 模型的性能显著优于基准 Fiala 模型。重要的是,在更换为新的 Bridgestone 轮胎并重新训练网络后,ExpTanh 模型的闭环行为保持相似。相比之下,未更改的 Fiala 模型性能显著下降,这表明轮胎的行为确实存在明显差异,而 ExpTanh 模型成功地通过稀疏数据进行了适应。这一点在均方根误差(RMSE)和侧滑追踪误差()值中也得到了反映:与基准模型相比,我们在横向误差上实现了超过 4 倍的改善,在侧滑跟踪上实现了超过 2 倍的改善,适用于两种轮胎。
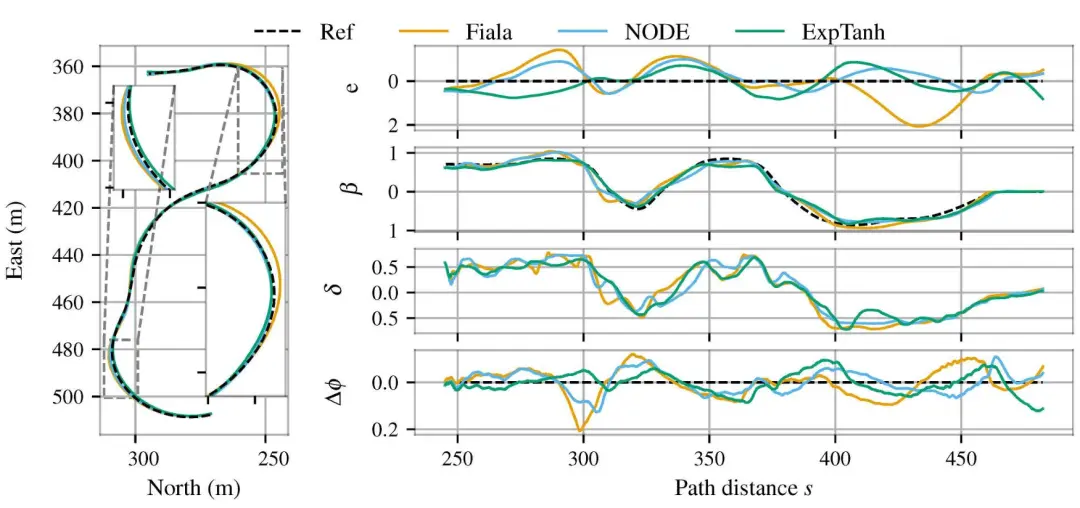
图 6 在八字形轨迹上漂移。与 Fiala 模型相比,我们的方法显示出更高的轨迹跟踪精度和更少的转向振荡。
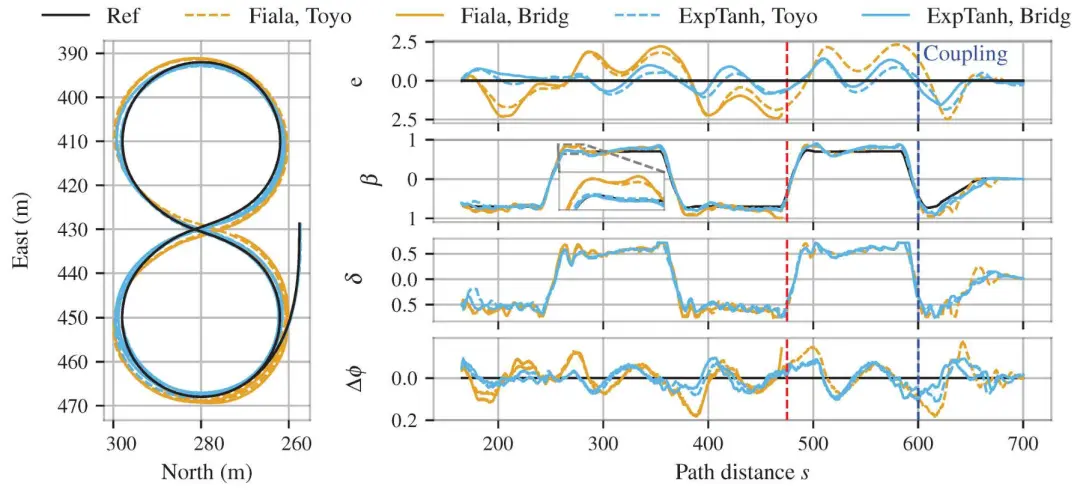
图 7 使用 3 分钟的数据在八字形轨迹上漂移。ExpTanh 模型在两种轮胎的跟踪性能都更好,尤其是在过渡区域。红线表示 Bridgestone+Fiala 测试结束的位置,原因是安全驾驶员对跟踪误差感到不适。
使用 ExpTanh 模型时,控制器在侧滑角 参考值的追踪上表现出较少的超调和较少的转向振荡,与 Fiala 模型相比。这种差异在每个过渡的结束阶段尤为明显,如侧滑演变的放大部分所示,在此阶段,由于瞬时载荷转移和高偏航率,我们预计会看到车辆状态之间更复杂的相互作用。这表明,ExpTanh 模型不仅能够捕捉这些效应,还能使控制器在闭环操作中利用这些效应。相比之下,使用 Fiala 模型的控制器在这些过渡期间往往会出现严重的超调现象。
另一个具有复杂耦合的区域是在实验结束时从漂移到抓地驾驶的缓慢过渡(例如,)。在这个阶段,基准的 Toyo + Fiala 模型组合表现出明显的转向和侧滑振荡。相比之下,使用两种轮胎的 ExpTanh 模型能够平滑地追踪侧滑,并且在横向误差性能上表现更佳。
图 8 比较了在 Toyo 实验中观察到的最优控制问题计算时间。由于其简单性,Fiala 模型的前向评估可能比 ExpTanh 更快。然而,在非线性模型预测控制(NMPC)中,轮胎模型的准确性和雅可比矩阵的平滑性非常重要。图 8 显示,Fiala 模型的 NMPC 通常需要比 ExpTanh 更多的梯度迭代才能收敛到解决方案。在过渡阶段 ( ),这种情况更加明显,使用 Fiala 模型时迭代次数增加了三倍,而使用 ExpTanh 时则保持相似。这表明,采用 ExpTanh 的 NMPC 在速度和一致性上都可能更具优势。
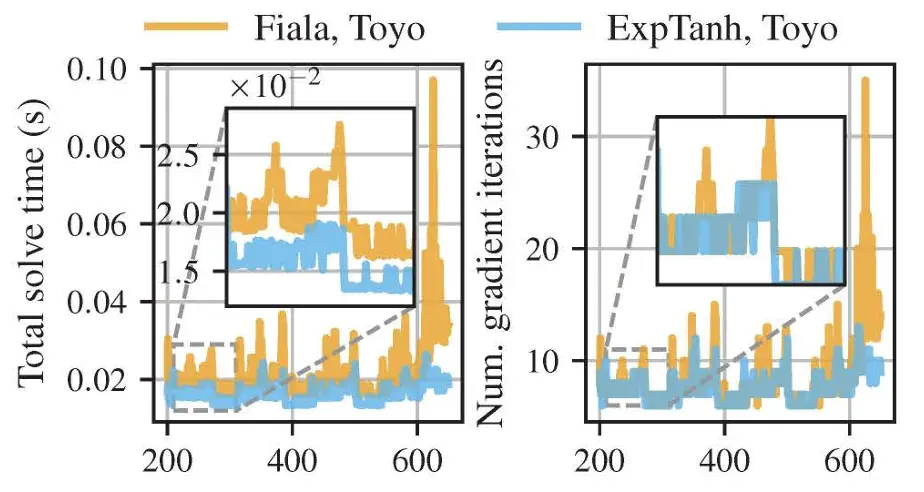
图 8 控制器的计算时间和梯度迭代次数
Ⅴ 结论
我们提出了一系列基于神经常微分方程(NODE)和 ExpTanh 的轮胎力模型。这些模型结合了基于物理的轮胎建模基础和利用车载传感器测量直接学习轮胎、悬挂和道路之间相互作用的高阶效应的能力。自主漂移实验在极端条件下对模型进行了测试,结果显示出改善的跟踪性能、优化的计算时间和前所未有的数据效率:仅用 3 分钟的驾驶时间就实现了学习。最后,我们快速的训练时间(通常几秒钟)表明,未来的工作可以探索在终身学习环境中使用这些模型,即在驾驶过程中实时更新轮胎曲线。
参考文献



编辑推荐




最新资讯
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
-
天检新能力VOL.95 | 乘员晕车仿生测试能力
2025-04-25 10:14
