




 广告
广告





















































R140法规对电子稳定控制ESC的要求及测试方法(上)

1.什么是电子稳定控制ESC系统
2.R140的适用范围和定义
3.R140对ESC的要求
4.R140规定的ESC测试条件
5.R140规定的ESC测试流程6.仿真工具和仿真验证
1.什么是电子稳定控制ESC系统
电子稳定控制ESC (Electronic Stability Control),是一种旨在自动调整车身稳定性,进而预防意外事件发生的系统。
ESC系统通过运用先进的传感器技术,包括转向传感器、车轮传感器、侧滑传感器、橫向加速度传感器等,来实时监测车辆的运行状态。
当系统检测到车辆有可能偏离预定的行驶轨迹或处于不稳定状态时,会立即进行干预。
通过向特定车轮施加制动力、调整牵引力或适度减少发动机气门
(驱动力)
的输出,ESC系统能够迅速引导车辆回到稳定的行驶路径上。
2.R140的适用范围和定义
R140法规适用于M1和N1类车辆电子稳定控制系统的批准。不包括:
(a)设计时速不超过25km/h的车辆; (b)为残疾驾驶员配备的车辆。
就R140法规而言: “车辆类型Vehicle type”是指在以下基本方面没有区别的一类车辆:
(a)制造商的名称或商标;
(b)严重影响电子稳定控制系统性能的车辆特征(例如最大质量、重心位置、轮距、轴距、轮胎尺寸和制动系统的设计); (c)电子稳定控制系统的设计。
“最大质量Maximum mass”是指车辆制造商声明的技术允许的最大质量 (该质量可能高于国家行政部门规定的“允许的最大质量”)。
“车轴之间的质量分布The distribution of mass among the axles”是指车辆质量和/或其内部物的重力影响在车轴之间的分布。 “车轮/车轴载荷Wheel/axle load”是指路面在 (车轴上的)车轮接触区域的垂直静反力。
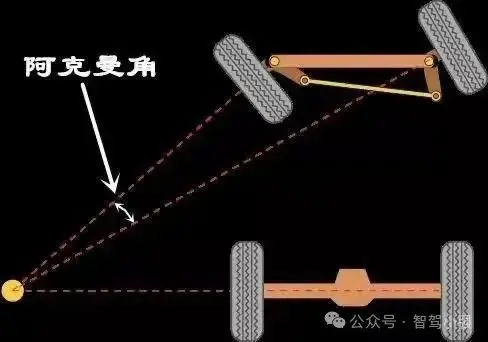
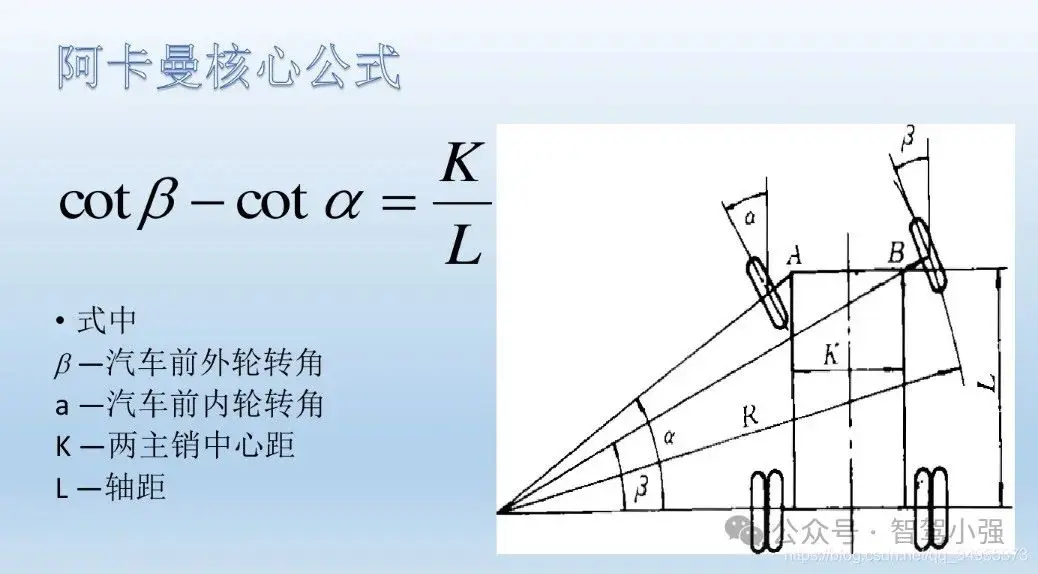
“阿克曼转角Ackerman steer angle”是指车转向时两个转向轮之间形成的夹角。
由于转向系统形状的几何特性,使车辆转向时内侧轮比外侧轮转动更多的角度。内侧轮(相对弯心而言) 通常会比外侧轮要转的角度大一些。加大转向角度时,这个夹角也会相应变大。通常设定阿克曼转角是通过改变转向推杆在转向杯上的固定孔位来进行。转向推杆的角度较大时将会产生更多的阿克曼角度,反之类同。
由于车辆转弯时内外轮的行驶半径不同,阿克曼转角可以帮助两个前轮轮分别指向正确的行驶方向,以获取更多的抓地力。
在抓地力低的情况下,建议调车时增加阿克曼角度。竞速车需要有一定的阿克曼角,这样在过弯的时候才不会甩出去;而漂移车来说,我们要的是阿克曼角接近于0,因为越大的阿克曼角意味着越难甩出去。
“电子稳定控制(ESC)系统Electronic Stability Control System”是指具有以下所有属性的系统:
(a)通过至少能够自动控制每个轴上左右车轮的制动扭矩,根据对实际车辆行为的评估,与对驾驶员要求的车辆行为的确定进行比较,产生纠正偏航力矩,从而提高车辆的方向稳定性;
(b)即由计算机控制,使用闭环算法限制车辆过度转向,并根据对实际车辆行为的评估,与司机要求的车辆行为的确定进行比较,限制车辆转向不足;
(c)有办法直接确定车辆横摆角速度yaw rate的值,并估计其侧滑或侧滑率;
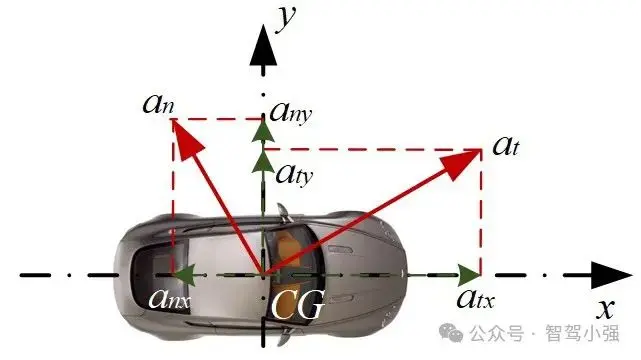
(d)具备监测驾驶员转向输入的手段; (e)具有确定需求的算法和必要时修改推进扭矩的手段,以帮助驾驶员保持对车辆的控制。 “横向加速度Lateral acceleration”是指车辆中垂直于车辆x轴(纵向)并平行于道路平面的加速度矢量的分量。
“过度转向Over steer”是指车辆横摆率大于由阿克曼转角在车辆速度下导致的横摆率的情况。
“侧滑或侧滑角Side-slip or side-slip angle”是指车辆重心位置横向速度与纵向速度之比的反正切。
“转向不足Under steer”是指车辆横摆率小于由阿克曼转角在车辆速度下导致的横摆率的情况。
“横摆角速度Yaw rate”是指车辆朝向角的变化率,以绕通过车辆重心的垂直轴旋转的°/s为单位。
“峰值制动系数 (PBC) Peak braking coeficient”指根据滚动轮胎的最大减速测量轮胎与路面摩擦。

“公共空间Common space”是指可以同时显示一个以上标志、指示器、识别符号或其他信息的区域。
“静态稳定系数Static stability Factor”是指车辆轮距除以其重心高度的一半,也表示为SSF=T/2H。
T=轮距(对于具有多个轮距的车辆,使用平均值;对于双轮车轴,在计算"T“时使用外轮);H=车辆重心高度。
3.R140对ESC的要求
3.1 一般要求
3.1.1 配备ESC的车辆应在本法规第5部分规定的测试程序和第4部分 规定的测试条件下满足第3.2段规定的功能要求和第3.3段规定的性能要求。
3.1.1.1 作为第3.1.1段要求的替代办法,行驶质量超过1735kg的M1和N1类车辆可配备车辆稳定功能,包括翻滚控制和方向控制,并符合R13法规附件21的技术要求和过渡规定。这些车辆不需要满足3.1.1的要求。
3.1.2 ESC的设计、构造和安装应使车辆在正常使用时,尽管可能受到振动,仍能符合本法规的规定。
3.1.3 ESC的设计、构造和安装应能抵抗其暴露的
腐蚀和老化
现象。
3.1.4 ESC的有效性不应受到磁场或电场的不利配响。这应通过满足技术要求和符合R10-EMC法规的规定来证明:
(a)R10.03系列修正案,适用于没有可充电储能系统REESS(动力电池)的车辆; (b)R10.04系列修正案,适用于带有可充电储能系统REESS(动力电池) 的车辆。 3.1.5 根据与复杂电子控制系统相关的R13-H法规要求,ESC安全方面的评估应包括在制动系统的整体安全评估中,以评估其对制动系统的直接影响。在提交包括ESC系统的R13-H法规证书后,这被视为已完成。

3.1.6 ESC系统定期技术检查规定:
(a)在定期技术检查中,应可以在通电后通过目视观察警告信号来确认正确的运行状态。 (b)在型式认证时,应保密地概述为防止对警告信号的操作进行简单的未经授权的修改而实施的方法。或者,当有检查正确操作状态的辅助手段可用时(有系统自检时),就满足了这一保护要求。
3.2 功能要求
根据本法规提交审批的每辆车都应配备电子稳定控制(ESC)系统,该系统应:
(a)能够将制动力矩单独施加到所有四个车轮,并具有利用这种能力的控制算法;
(b)在车辆的全速度范围内运行,包括加速、滑行和减速(包括制动),但以下情况除外:
(i)驾驶员已停用ESC时;
(ii) 车速低于20km/h时;
(iii)在完成初始启动自检和合理性检查时,在5.10规定的条件下驾驶不超过2分钟;
(iv)车辆倒车行驶时。
(c)即使制动防抱死系统ABS或牵引力控制系统TCS也被激活,仍然能够激活。







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
