




 广告
广告





















































R140法规对电子稳定控制ESC的要求及测试方法(下)

1.什么是电子稳定控制ESC系统
2.R140的适用范围和定义
3.R140对ESC的要求
4.R140规定的ESC测试条件
5.R140规定的ESC测试流程
6.仿真工具和仿真验证
5.R140规定的ESC测试流程
5.1 轮胎充气 将车辆轮胎充气至制造商推荐的冷充气压力,例如车辆标牌或轮胎充气压力标签上提供的气压。
5.2 报警灯检查(上电自检) 当车辆静止且点火定系统处于“锁定”或“关闭”位置时,将点火开关切换到“打开”(运行)位置,或在适用的情况下切换到报警灯检查的适当位置。
ESC故障报警灯应点亮,进行报警灯功能检查(上电自检)。如果配备了“ESC关闭”报警灯,则该报警信号也应点亮,进行关闭灯功能检查(上电自检)。在公共空间显示的弹窗报警不需要报警灯检查。

5.3 ESC Off控制检查 对于配备“ESC Off”控制的车辆,在车辆静止且点火锁定系统处于“Lock”或“Off”位置的情况下,将点火锁定系统切换到“On”(Run)位置。启动“ESC Off”控制并验证“ESC Off报警灯”是否点亮。
将点火锁定系统切换到“Lock”或“Off”位置。再次将点火锁定系统切换到“On”(Run) 位置,并验证“ESC Off报警灯”是否熄灭,表明ESC系统已上电自恢复。
5.4 制动调节
按照如下方式调节车辆制动器:
(a)从56km/h的速度进行十次停车,平均减速约0.5g;
(b)紧接着10次56km/h的停车后,在72km/h的速度下进行3次大减速度停车;
(c)执行(b)中的停车时,在制动踏板上施加足够的力,使车辆的防抱死制动系统(ABS) 在每次制动事件的大部分时间内运行; (d)在(b)中的最后一次停车完成后,车辆以72km/h的速度行驶5分钟,以冷却刹车。

5.5 轮胎打磨
在开始第5.6段和第5.9段的测试之前,使用以下程序对轮胎进行打磨,以增加其摩擦并达到工作温度:
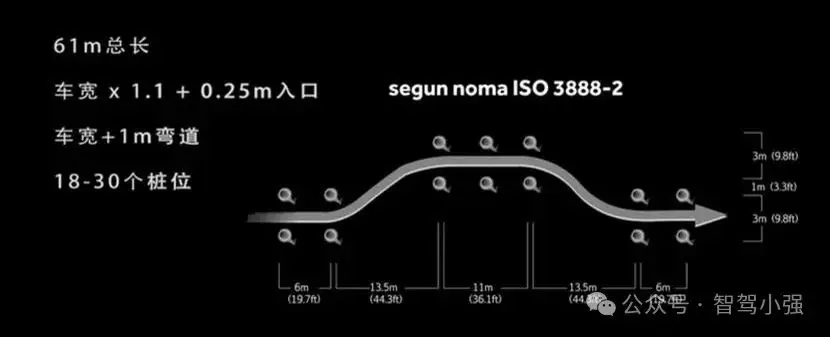
(a)弯道:测试车辆绕直径30米的圆圈行驶,顺时针三圈,逆时针三圈,速度应使横向加速度ay约为0.5~0.6g, 约32km/h; (b)双移线:使用频率为1Hz的正弦转向模式,峰值方向盘角度振幅对应于0.5~0.5g的峰值横向加速度,车速为56km/h,车辆进行四次双移线,每次执行10个周期的正弦转向循环; (c) 最后一次双移线的最后一个周期的方向盘角度振幅应为其他周期的两倍。弯道和双移线之间允许的最大时间间隔为五分钟。
5.6 缓慢增加转向
车辆进行两次缓慢增加转向测试,使用80±2km/h的恒定车速和每秒增加13.5°的转向模式,直到获得约0.5g的横向加速度。顺时针转向测试三次,逆时针转向测试三次。每次测试运行之间允许的最大时间间隔为五分钟。
从缓慢增加的转向测试中,确定了数量“A”。“A”是测试车辆产生0.3g的稳态横向加速度 (使用第5.11段中规定的方法进行校正)的方向盘角度。利用线性回归,从六个缓慢增加的转向试验中的每一个中计算出最接近的A。计算出的六个A值的绝对值被平均并舍入到最接近的0.1°,以产生下面使用的最终数量A。
5.7 再次轮胎打磨
在确定数量A后,在不更换轮胎的情况下,在进行第5.9段的带驻留正弦试验之前,再次执行第5.5段中描述的轮胎调节流程。第5.6段的缓慢增加转向试验完成后两小时内,应开始启动第一个带驻留正弦试验。
5.8 确定ESC系统已启用
通过确保“ESC故障”和“ESC Off”(如果提供)报警灯未点亮,确定ESC系统已启用。
5.9 过度转向干预和响应能力的正弦驻留测试
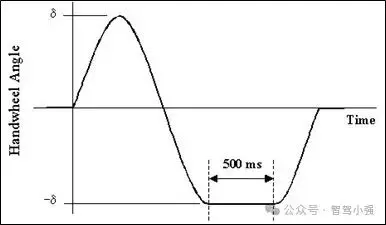
如下图所示,车辆使用频率为0.7Hz的正弦波转向模式进行两个系列测试运行,从第二个峰值振幅开始延迟500 ms(正弦驻留测试)。一个系列在前半个循环中使用逆时针转向,另一个系列在前半个循环中使用顺时针转向。允许车辆在每次测试运行之间静止冷却1.5~5分钟。
5.9.1 转向运动是在车辆以80±2km/h的高速滑行时开始的。
5.9.2 每个系列的初始运行的转向幅度为1.5A,其中A是第5.6段中确定的方向盘角度。
5.9.3 每一系列的测试运行中,转向幅度每次增加0.5A,但这种运行不会导致转向幅度大于第5.9.4段规定的最终运行的转向幅度。
5.9.4 在每个系列的测试中,最后运行的转向幅度为6.5 A或270°中的较大者,但6.5 A的计算幅度须小于或等于300°。如任何0.5 A的增量(直至6.5A)大于300°,则最后运行的转向幅度 须为300°。 5.9.5 在完成两个系列的测试运行后,将按照第5.11段的规定对偏航角速度和横向加速度数据进行后处理。
5.10 ESC故障检测
5.10.1 通过断开电源与任何ESC组件的连接,或断开ESC组件之间的任何电气连接(在车辆电源关闭的情况下)来模拟一个或多个ESC故障。模拟ESC故障时,不能断开报警灯和/或可选ESC系统控制的电气连接。 5.10.2 在车辆初始静止且点火锁定系统处于“锁定”或“关闭”位置的情况下,将点火锁定系统切换到“启动”位置并启动发动机。将车辆向前行驶以获得48±8km/h的车速,并在此速度下进行至少一次左右平稳转弯机动而不失去方向稳定性和一次制动,转弯机动最迟在发动机启动后30s内开始,并在接下来的两分钟内完成。在这些机动结束时,验证ESC故障指示灯是否按照第3.3.4段的规定点亮。

5.10.3 停止车辆,将点火锁定系统切换到“关闭”或“锁定〞位置。五分钟后,将车辆的点火锁定系统切换到启动”位置并启动发动机。验证ESC故障指示灯再次亮起以发出故障报警信号,并在发动机运行期间或故障得到纠正之前保持故障报警点亮。 5.10.4 将点火锁定系统切换到“关闭”或“锁定”位置。将ESC系统恢复到正常运行,将点火系统切换到“启动”位置并启动发动机。重新执行第5.10.2段中描述的操作,并验证ESC故障报警在此时间内或之后立即熄灭。
5.11 数据后处理-性能指标的计算
横摆角速度和横向位移测量和计算应利用第5.11.1至5.11.8段规定的技术进行处理。
5.11.1 原始方向盘角度数据用12极无相位巴特沃斯滤波器和10Hz的截止频率过滤。然后,利用静态预测试数据将过滤后的数据归零,以消除传感器偏移。
5.11.2 原始横摆角速度数据用12极无相位巴特沃斯滤波器和6Hz的截止频率过滤。然后,利用静态预测试数据将过滤后的数据归零,以消除传感器偏移。 5.11.3 用12极无相位巴特沃斯滤波器和6Hz的截止频率过滤原始横向加速度数据。然后,利用静态预测试数据将过滤后的数据归零,以消除传感器偏移。车辆重心的横向加速度数据是通过消除车身侧倾造成的影响和通过使用坐标变换校正传感器位置来确定的。为了进行数据采集,横向加速度计应尽可能靠近车辆纵向和横向重心的位置。

5.11.4 方向盘转速是通过对过滤后的方向盘角度数据进行微分来确定的。然后,用移动的0.1秒运行平均滤波器对方向盘速度数据进行滤波。
5.11.5 横向加速度、横摆角速度和方向盘角度数据通道使用定义的“归零范围”归零。用于确定归零范围的方法如下:
(a)使用使用第5.11.4段中描述的方法计算的方向盘转速数据,确定方向盘速率超过75°/s的第一个瞬间。从这一点开始,方向盘速率应保持大于75°/s至少200ms。如果不满足第二个条件,则确定方向盘速率超过75°/s的下一个瞬间,并应用200ms有效性检查。这个迭代过程将持续,直到两个条件最终都满足。 (b)“归零范围”定义为方向盘速度超过75°/s的瞬间之前的1.0s时间段(即方向盘速度超过75°/s的瞬间定义了“归零范围”的结束)。
5.11.6 转向开始(BOS)被定义为在定义“归零范围”结束后,过滤和归零方向盘角度数据达到-5°(初始转向输入逆时针)或+5°(初始转向输入顺时针)的第一个时刻。BOS处的时间值是插值获取的。
5.11.7 转向完成 (COS)是指在正弦驻留转向操作完成时,方向盘角度归零的时间。BOS处的时间值是插值获取的。
5.11.8 第二个横摆角速度峰值定义为方向盘反转产生的第一个局部横摆角速度峰值,COS后1.000s和1.750s的横摆角速度由插值法确定。
5.11.9 通过整合校正、滤波和归零的横向加速度数据来确定横向速度。BOS点的横向速度为零横向速度。通过积分零横向速度来确定横向位移。BOS点的横向位移为零。在BOS点后1.07秒进行横向位移测量,并通过插值确定。
6.仿真工具和仿真验证
6.1 动态稳定仿真的使用
电子稳定控制ESC系统的有效性可以通过计算机仿真来确定。
车辆制造商应通过模拟本法规第5.9段中的动态机动,向型式认证机构或技术服务部门展示车辆的稳定性。
仿真应是通过以下方式证明车辆稳定性性能的手段:
(a)在保持转向输入的正弦完成1s后的横摆角速度;
(b)在完成带有驻留的正弦转向输入1.75s后的横摆角速度; (c)车辆重心相对于其初始直线路径的横向位移。
仿真应使用经过验证的建模和仿真工具,并使用本法规第5.9段的动态机动,在本法规第4段的测试条件下进行。
6.2 动态稳定性仿真工具及其验证
6.2.1仿真工具规格
模拟方法应考虑影响车辆方向和侧倾运动的主要因素。典型模型可能以显式或隐式形式包括以下车辆参数:
(a)轴/轮;
(b)悬架;
(c)轮胎;
(d)底盘/车身;
(e)动力总成/传动系统,如适用;
(f)制动系统; (g) 有效载荷。
车辆稳定性函数应通过以下方式添加到仿真模型中:
(a)仿真工具的子系统(软件横型);或者
(b)硬件在环HIL配置的电子控制箱。
6.2.2 仿真工具的验证
所用的建模和仿真工具的有效性应通过与实际车辆测试的比较来验证。用于验证的测试应为本法规第5.9段所述的动态机动。
在试验过程中,应根据IS0 15037.1:2005《乘用车的一般条件》或IS0 15037.2:2002《重型车辆和公共汽车的一般条件》(取決于车辆类型)记录或计算以下运动变量:
(a)方向盘角度;
(b)纵向速度;
(c)侧倾角或横向速度(可选);
(d)向加速度(可选);
(e)横向加速度;
(f)横向角速度;
(g)侧倾角速度;
(h)俯仰角速度;
(i)侧倾角;(j)俯仰角。
目的是表明车辆稳定的模拟车辆行为和操作与实际车辆测试中所见的相当。
当仿真工具的输出与本法规第5.9段的动态机动期间给定车辆类型产生的实际测试结果相当时,仿真工具应被视为己验证。仿真和实际车辆测试中车辆稳定性函数的激活和顺序关系应是进行比较的手段。
参考车辆和模拟车辆配置之间不同的物理参数应在仿真中相应修改。
应制作仿真工具测试报告,并将副本附在车辆批准报告中。







最新资讯
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
-
天检新能力VOL.95 | 乘员晕车仿生测试能力
2025-04-25 10:14
