




 广告
广告





















































ENCAP2026对自适应巡航ACC和转向辅助SA的要求(上)

1.ACC性能要求
2.ACC车对车
3.ACC车对摩托车
4.ACC车对VRU
5.转向辅助SA
1.ACC性能要求
ENCAP2026安全驾驶测试项100分中,车辆辅助占比40%,满分40分。其中ACC性能要求为15分,分为车对车、车对摩托车、车对VRU、道路特征、自动起步五个部分。
ACC性能15车对车6纵向4切入/切出2车对摩托车5纵向4切入/切出1车对VRU2纵向2道路特征1自动起步1
此处仅评估ACC系统的能力,确保实车加速度≥-5 m/s²,或者其中确认AEB没有干预。
所有ACC测试都按照ENCAP碰撞避免(AEB)协议进行,但是,如果本协议中的程序偏离这些协议,则应遵循ACC协议。
对于每次测试,车辆应在两侧均有车道线的车道上行驶,表显ACC速度应设置为所需的测试速度(不是GPS速度)。所有测试的ACC的跟随距离应设置为最短跟随距离。
在可能的情况下,应启动转向机器人并用于控制测试车辆VUT在车道内的位置。当该系统不可用时,车辆将手动驾驶。
ACC应在到达目标的TTC=10s前或纵向相对距离250m之前处于激活状态。
车辆制造商必须向ENCAP秘书处提供详细说明ACC性能的彩色数据(不需要预期碰撞速度)
对于CCRs、CCRm、CMRs和CMRm,评估基于车辆制造商提供的得分预测。测试实验室将随机选择并测试CCRS和CCRm的10个案例以及CMRs和CMRm的10个案例以验证制造商的预测,抽样分布应符合预测的颜色分布(不含灰点)。
如果车辆制造商不提供性能数据,测试实验室将进行所有场景。
颜色期待的ACC性能(≥-5m/s²)绿色车对车避撞车对摩托车避撞车对VRU减速度>30km/h橙色车对车减速度>15km/h车对摩托车减速度>15km/h车对VRU减速度>15km/h灰色车对车减速度≤15km/h车对摩托车减速度≤15km/h车对VRU减速度≤15km/h
2.ACC车对车
车对车6纵向4CCRs直道1CCRs弯道1CCRm1CCRb1切入/切出2切入1切出1
2.1 CCRs
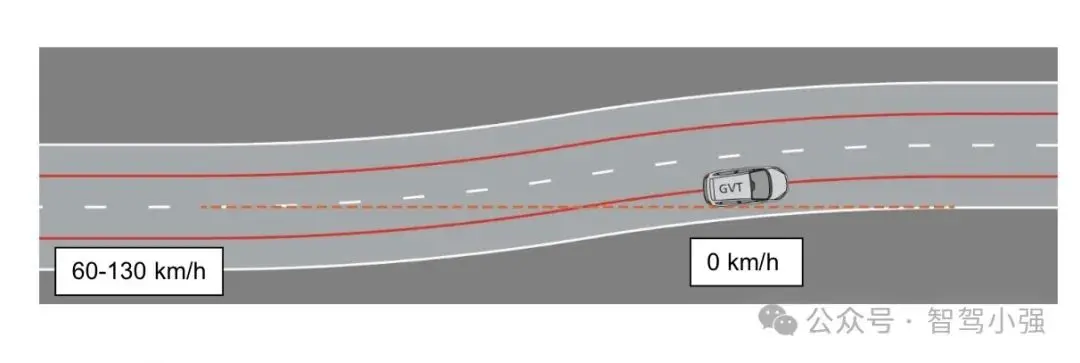
CCRs测试在直道和弯道上以60~130km/h的车速以10km/h的速度增量进行。直线道路上的测试以100%的重叠进行。 对于弯道的测试,目标车GVT位于S弯的第一个弯道(如转向辅助评估所要求)的中央位置。目标车右后角延长线分别相交于所在车道的左侧车道线和右侧车道线(如下图所示)。
2.2 CCRm
在GVT以60km/h的速度行驶的CCRm测试案例中,允许使用装有数据记录仪器的真实Ford Fiesta车辆替代GVT。只有车辆制造商预测的ACC系统(减速度不超过5m/s²且AEB不干预)能完全避撞时,才能使用真实车辆做目标车。
如果测试车辆VUT在TTC=3.0 s时没有启动ACC制动,则测试应安全中止,此时将使用GVT软目标重复测试。
2.3 CCRb
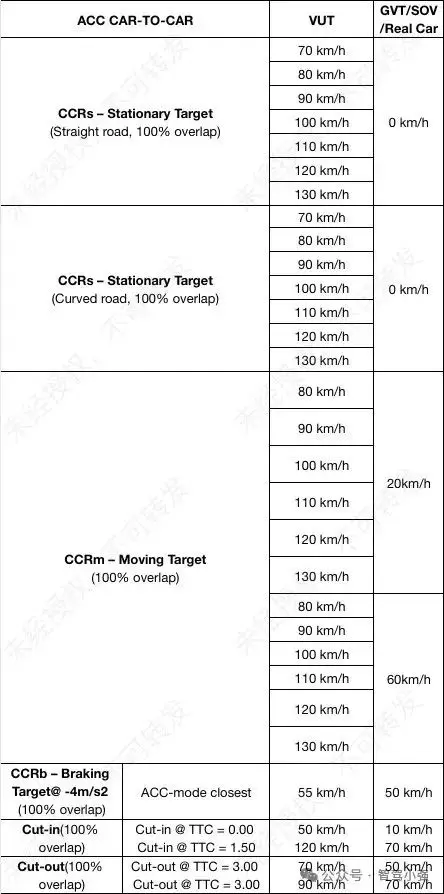
CCRb测试案例见下表:
2.4 切入测试
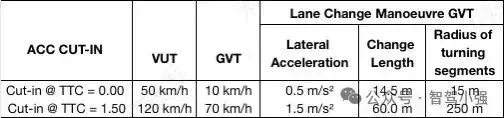
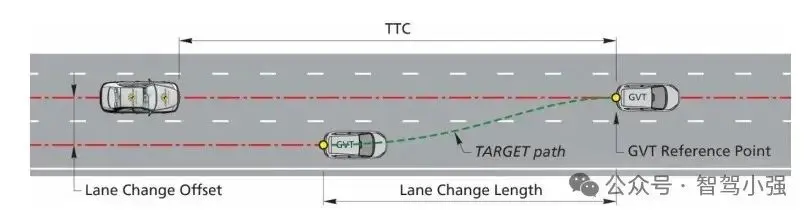
在切入测试中,相邻车道上的GVT应向VUT的车道进行完全变道(3.5m横向偏移)。TTC定义为GVT完成变道操作时的TTC,其中GVT的后中心位于VUT行驶车道的中间。
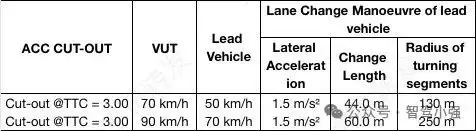
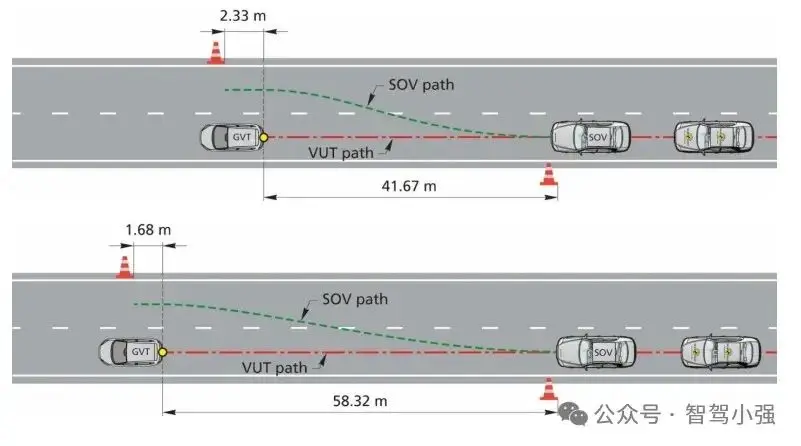
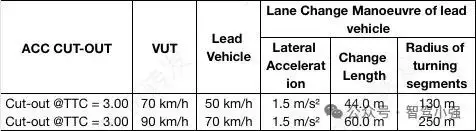
2.5 切出测试
切出测试应使用SOV进行。切出车辆(SOV)应向相邻车道进行全变道(3.5m横向偏移),以避开静止的GVT。静止GVT后面的测量指示变道开始,静止GVT前面的测量指示变道结束。
指示的TTC定义为切出车辆开始变道时与GVT的TTC。SOV在变道操纵期间不得使用转向灯。测试实验室可以放置不同切出路径的物理标记,但不影响车辆性能。SOV路径偏差=[±0.2m]。
3.ACC车对摩托车
车对摩托车6纵向4CMRs直道1CMRs弯道1CMRm1CMRb1切入/切出2切入1切出1
3.1 CMRs
CMRs测试在直道和弯道上以60~90km/h的车速以10km/h的速度增量进行。
对于在直线道路上进行的测试,固定摩托车软目标EMT位于25%的碰撞点位置。测试实验室应随机选择以下场景之一布置。
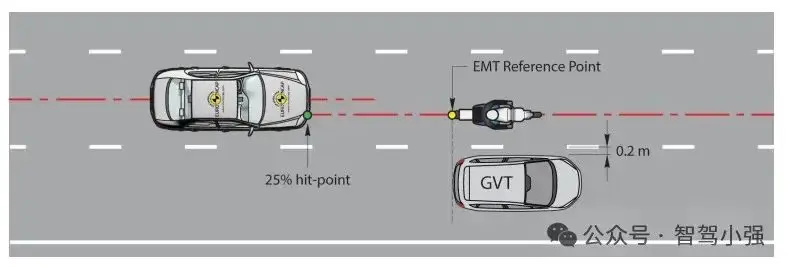
位于相邻车道中的静止GVT,使得左侧距离测试车辆所在车道的右侧虚线车道线的中心20厘米,并且后侧与静止EMT的后轮平行。
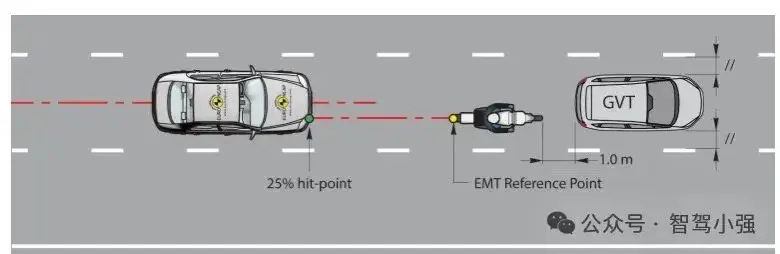
位于本车道的GVT应位于车道中间位置,尾部距离EMT的前部1m。
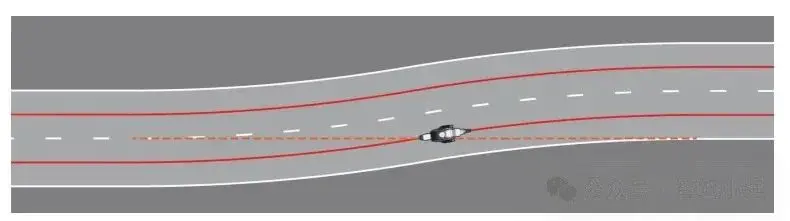
对于弯道的测试,摩托车软目标EMT位于S弯的第一个弯道(如转向辅助评估所要求)的中央位置。摩托车后轮延长线分别相交于所在车道的左侧车道线和右侧车道线(如上图所示)。
3.2 CMRm
在CMRm测试用例中,EMT以60km/h的速度行驶时,允许使用带有数据记录仪器的真实摩托车。
只有车辆制造商预测的ACC系统(减速度不超过5m/s²且AEB不干预)能完全避撞时,才能使用真实摩托车做目标车。
如果测试车辆VUT在TTC=3.0 s时没有启动ACC制动,则测试应安全中止,此时将使用EMT软目标重复测试。
3.3 CMRb
对于CMRb,测试以与CCRb相同的方式进行,但EMT位于25%的碰撞点。
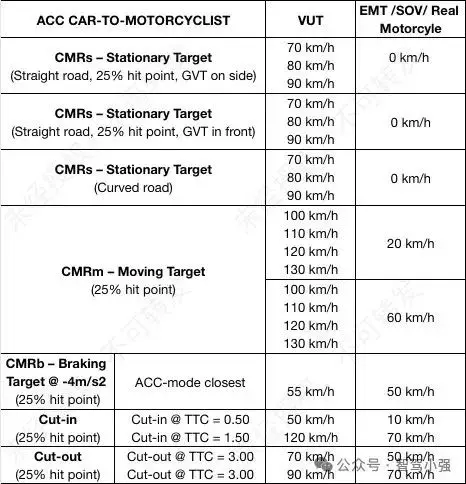
3.4 切入
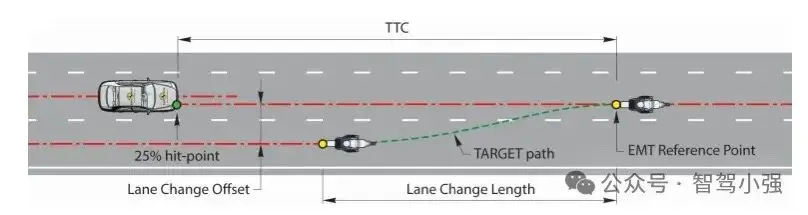
在切入试验中,相邻车道的EMT应向VUT的车道进行部分变道(2.5m横向偏移)。指示的TTC定义为EMT完成变道机动的时间点的TTC,其中EMT的后轮处于VUT的25%碰撞点。
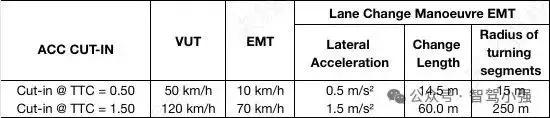
为了确保在不同的EMT平台上实现逼真的轨迹和足够的可重复性/再现性,在车道变换长度期间应满足以下EMT边界条件:
路径误差/横向偏差[m]: ± 0.15
航向/偏航角偏差 [°]: ±2.00
速度偏差[km/h]: ±0.50
3.5 切出
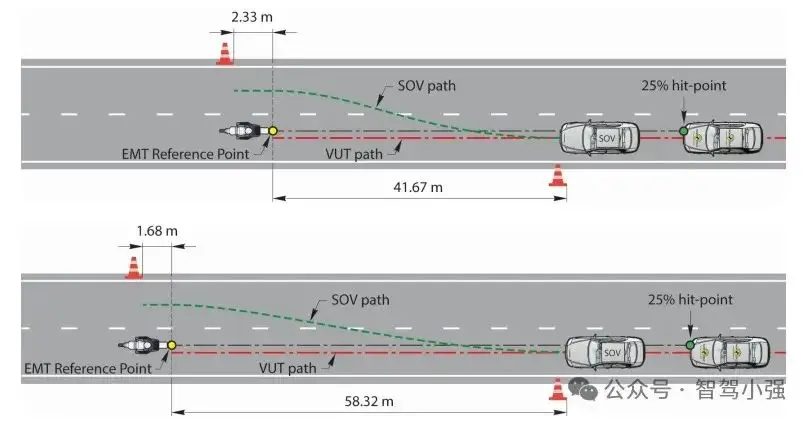
切出测试应使用SOV进行。切出车辆(SOV)应向相邻车道进行全变道(3.5m横向偏移),以避开位于25%碰撞点的静止EMT。
下图指示的TTC定义为当SOV开始变道时SOV到EMT的TTC。SOV在变道操纵期间不得使用转向灯。测试实验室可以放置不同切出路径的物理标记,这不会影响车辆性能。SOV路径偏差=[±0.2m]。







最新资讯
-
曼恩和ABB成功测试基于以太网通信的电动重
2025-04-21 21:18
-
一文讲述汽车电子电气EEA架构
2025-04-21 20:58
-
中汽中心受邀参加中国消费品质量安全提升系
2025-04-21 20:57
-
标准解读 | 新版动力电池安全强标解读
2025-04-21 20:56
-
标准解读丨深圳地标《智能网联汽车自动驾驶
2025-04-21 20:54
