




 广告
广告





















































法规标准-懂车帝智能化实测标准(2024版)

场景:ACC+AEB消失的前车
1.场地布置:
——测试选取封闭场地,试验路面应为水平、干燥,具有良好附着能力的混凝土沥青路面,附着系数在0.8以上
——试验过程中,在试验道路两边3m以内或者静止目标车前方30m内不能有任何车辆、障碍物或其他影响试验的物体,路面上方的标志物、桥梁及其他物体或建筑必须高于路面5m
——气候条件良好,无降雨、降雪、冰霜、扬尘等恶劣天气情况
——温度在5℃~42℃之间,风速应低于5m/s
——试验路面要求压实并且无可能造成传感器异常工作的不规则物(如大的倾角、裂缝、井盖或是具有反射能力的螺栓等)
——试验应在均匀的自然光照条件下进行,光照度不小于2000lux,除非制造厂商对光照度的要求下限更低;实验道路无明显阴影,车辆不能朝向太阳行驶
——温度、风速、光照度等环境参数每10min记录一次
——与M1类乘用车具有相同反射特性的假车作为目标车
——目标静止停在试验道路的中间,车辆纵向轴线应与车道线平行且与主车行驶方向一致
——车道宽度3.75m,车道线为白色实线或白色虚线,若为白色虚线,则虚实比为6/9
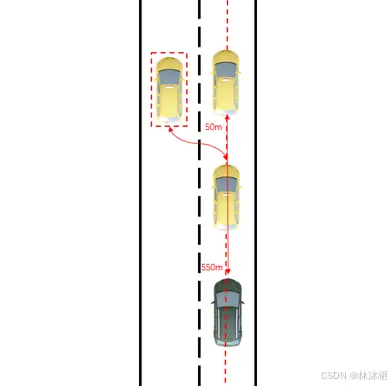
——在道路正中央摆放静态假车,在左侧车道线上摆放桩桶或A板用于估算识别距离。桩桶摆放每隔10m一个,摆放20个,共计200m;A板间隔50m摆放,共摆放3个,共计150m。如遇桩桶影响车辆测试速度,参照物可适当原理测试车道方向平移。第一个参照物距假车50m
——测试道路留有300m以上的加速距离、200m以上的稳速距离、50m前车切出距离以及200m以上的安全距离
2.车辆设置:
——测试前检查OTA,保证最新版本且智驾考试已通过,另检查激光雷达、毫米波雷达、摄像头等传感器硬件表面清洁无遮挡
——测试车电量以不影响测试直行标准第二条为准
——车辆驾驶模式标准或舒适动能回收中,车辆开启ACC、AEB,碰撞预警类功能灵敏度设置为中等,跟车距离设置为中等(4挡用2挡,5挡用3挡,特斯拉用4挡),确保车辆各项功能都能正常开启使用
——辅助驾驶/安全提醒音量均调节到50%,驾驶员辅助语音标准为详细
3.测试执行:
——协同测试车与测试车同步出发,测试初始速度为30km/h,尽量保证双车起步加速度一致,前车V-BOX表显车速尽快达到测试所需速度保持稳定车速,±1km/h
——从道路尽头起步,开启ACC功能设定时速,在进入参照物区域之前将车速稳定在设定速度;
——一般将测试车ACC速度设置为目标速度+10km/h,便于跟紧前车协同测试车,测试车内视线应被协同测试车完全遮蔽抑制看不到静态假车,如有露出及时手台通过重新开始测试
——系统测试车车头到达50m锥桶标点位置时开启转向灯,同时在2秒内完成右并线切出动作,并线后左侧车身尽量贴近假车,完成切出动作后继续前行
——前车切出后,测试车继续保持方向,不干预加速和刹车踏板,直至成功识别制动或与假车发生碰撞,驻车制动
——若车辆触发防追尾机制,需确认触发前,车辆是否减速至5km/h以内,如速度符合标准,则测试通过,反之,失败
——测试速度级范围为30km/h~120km/h,每个速度级成功后则将速度递增10km/h,直至测试失败或达到满分成绩;
——120km/h为满分成绩,可提高时速继续测试,但更高的时速不作为该车的成绩。可凭借经验判断测试初始速度,AEB项目只进行一次测试,当车辆在某一时速下无法碰撞,则测试结束
4.注意事项
——测试员需要时刻做好接管车辆的准备。在测试失败时做好人工接管避让假车或制动的准备,应避免测试车速高于50km/h的情况下与假车发生碰撞
——提前检查车辆行人保护装置,测试前拆除
5.产出数据:
测试速度【速度+过没过+是否碰撞】
ACC/AEB制动情况【制动力描述、制动流程描述】
FCW报警【报警形式:声音/图标/氛围灯/方向盘振动/座椅震动】
安全带预张紧或约束【是否有】
双闪【是否有】
识别【识别情况具体描述】







最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
