




 广告
广告





















































中国智能网联汽车技术规程(C-ICAP-2024版)之领航行车辅助测评规则


领航行车辅助系统:适用于高速路和快速路,可以基于导航路线实现点到点通行的组合驾驶辅助系统。
1. 评价方法
1. 1. 指标体系
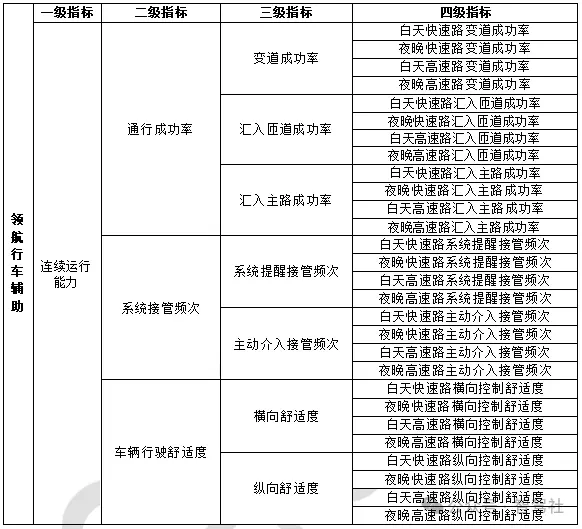
领航行车辅助下设指标如表 1-1 所示。
表 1- 1 领航行车辅助指标体系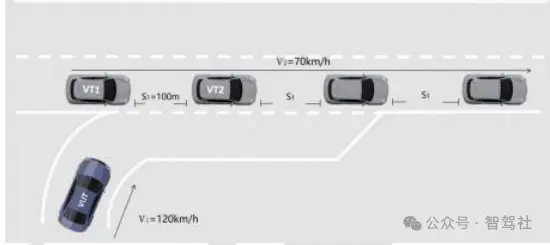
1.2. 指标权重分配
1.2. 1. 一级指标权重分配
领航行车辅助下设 2 个一级指标:主动换道能力和连续运行能力。 各一级指标权重如表 1-2 所示。
表 1- 2 领航行车辅助所包含的一级指标权重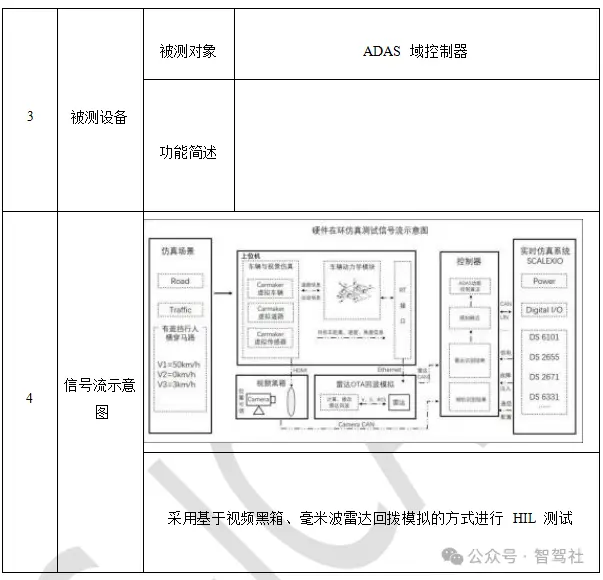
1.2.2. 二级指标权重分配
主动换道能力下设3个二级指标:车道占用换道、突发情况换道和导航路线换道。 连续运行能力下设 3 个二级指标:通行成功率、系统接管频次和车辆行驶舒适度。各个三级指标权重如表 1-3 所示。
表 1- 3 领航行车辅助所包含的二级指标权重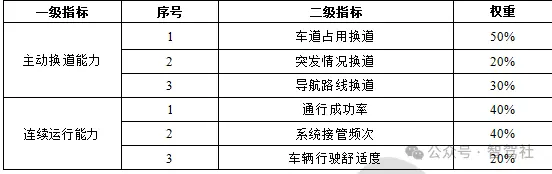
1.2.3. 三级指标权重分配
1.2.3.1. 车道占用换道能力权重分配
车道占用换道能力下设 3 个三级指标:前方遇静止障碍物、前方遇缓行车辆和前方遇切入车 辆。各个三级指标权重如表 1-4 所示。
表 1- 4 车道占用换道能力所包含三级指标权重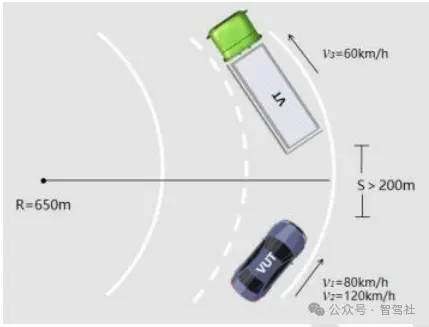
1.2.3.2. 突发情况换道能力权重分配
突发情况换道能力下设 2 个三级指标:前方遇道路施工和前方遇事故区域。各个三级指标权 重如表 1-5 所示。
表 1- 5 突发情况换道能力所包含三级指标权重
1.2.3.3. 导航路线换道能力权重分配
导航路线换道能力下设 2 个三级指标:主路汇入匝道和匝道汇入主路。各个三级指标权重如 表 1-6 所示。
表 1- 6 导航路线换道能力所包含三级指标权重
1.2.3.4. 通行成功率权重分配
通行成功率下设 3 个三级指标:变道成功率、汇入匝道成功率和汇入主路成功率。各个三级 指标权重如表 1-7 所示。
表 1- 7 通行成功率所包含三级指标权重
1.2.3.5. 系统接管频次权重分配
系统接管频次下设 2 个三级指标:系统提醒接管频次和主动介入接管频次。各个三级指标权 重如表 1-8 所示。
表 1-8 系统接管频次所包含三级指标权重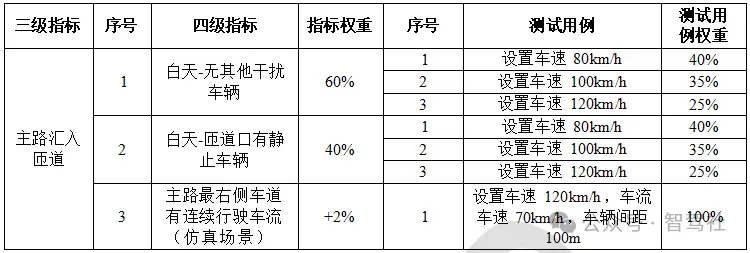
1.2.3.6. 车辆行驶舒适度权重分配
车辆行驶舒适度下设 2 个三级指标:横向控制舒适度和纵向控制舒适度。各个三级指标权重 如表 1-9 所示。
表 1- 9 车辆行驶舒适度所包含三级指标权重
1.2.4. 四级指标权重分配
1.2.4.1. 前方遇静止障碍物权重分配
前方遇静止障碍物下设 3 个四级指标: 白天-弯道-静止乘用车、夜晚-弯道-静止乘用车和白 天-直道-虚线-静止障碍物。各个四级指标权重如表 1-10 所示。
1- 10 前方遇静止障碍物所包含四级指标权重
1.2.4.2. 前方遇缓行车辆权重分配
前方遇缓行车辆下设 3 个四级指标: 白天-弯道-虚线-前方乘用车缓行、弯道-缓行卡车(仿 真场景)和白天-直道-双车道拥堵变为相邻车道顺畅(仿真场景)。各个四级指标权重如表 1-11 所示。
表 1- 11 前方遇缓行车辆所包含四级指标权重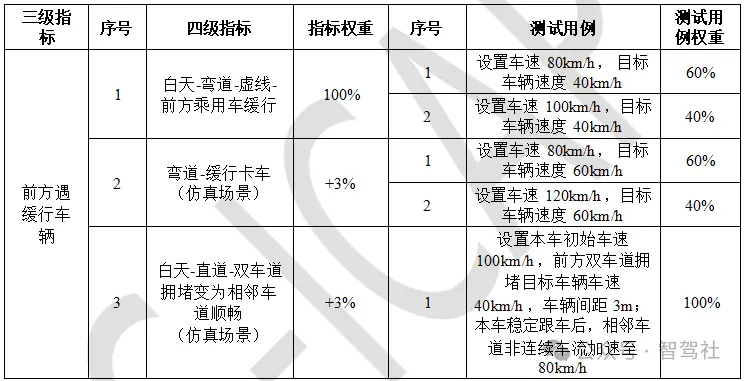
1.2.4.3. 前方遇切入车辆权重分配
前方遇切入车辆下设 1 个四级指标: 白天-直道-虚线-前方乘用车切入。四级指标权重如表 1-12 所示。
表 1- 12 前方遇切入车辆所包含四级指标权重
1.2.4.4. 前方遇道路施工权重分配
前方遇道路施工下设 2 个四级指标: 白天-直道-施工区域(斜置锥桶)、 白天-直道-施工区域(斜置锥桶)-相邻车道有障碍车,各个四级指标权重如表 1-13所示。
表 1- 13 前方遇道路施工四级指标权重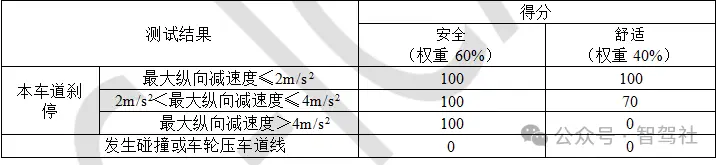
1.2.4.5. 前方遇事故区域权重分配
前方遇事故区域下设 3 个四级指标:前方遇事故车辆、白天-斜置货车侵占车道(仿真场景) 和中雨-直道-前方追尾乘用车并出现打伞行人(仿真场景)。各个四级指标权重如表 1-14 所示。
表 1- 14 前方遇事故区域所包含四级指标权重
1.2.4.6. 主路汇入匝道权重分配
主路汇入匝道下设 3 个四级指标: 白天-无其他干扰车辆、 白天-匝道口有静止车辆和路最右 侧车道有连续行驶车流(仿真场景)。各个四级指标权重如表 1-15 所示。
表 1- 15 主路汇入匝道所包含四级指标权重
1.2.4.7. 匝道汇入主路权重分配
匝道汇入主路下设 1 个四级指标: 白天-左侧邻车道后方有快速行驶车辆(仿真场景) 。四级指标权重如表 1-16 所示。
表 1- 16 匝道汇入主路所包含四级指标权重
1.2.4.8. 变道成功率权重分配
变道成功率下设 4 个四级指标:白天快速路变道成功率、夜晚快速路变道成功率和白天高速路变道成功率、夜晚高速路变道成功率。各个四级指标权重如表 1-17 所示。
表 1- 17 变道成功率所包含四级指标权重
1.2.4.9. 汇入匝道成功率权重分配
汇入匝道成功率下设 4 个四级指标:白天快速路汇入匝道成功率、夜晚快速路汇入匝道成功率和白天高速路汇入匝道成功率、夜晚高速路汇入匝道成功率。各个四级指标权重如表 1-18 所示。
表 1- 18 入匝道成功率所包含四级指标权重
1.2.4.10. 汇入主路成功率权重分配
汇入主路成功率下设 4 个四级指标:白天快速路汇入主路成功率、夜晚快速路汇入主路成功率和白天高速路汇入主路成功率、夜晚高速路汇入主路成功率。各个四级指标权重如表 1-19 所 示。
表 1- 19 汇入主路成功率所包含四级指标权重
1.2.4.11. 系统提醒接管频次权重分配
系统提醒接管频次下设 4 个四级指标:白天快速路系统提醒接管频次、夜晚快速路系统提醒 接管频次、白天高速路系统提醒接管频次和夜晚高速路系统提醒接管频次。各个四级指标权重如 表 1-20 所示。
表 1- 20 系统提醒接管频次所包含四级指标权重
1.2.4.12. 主动介入接管频次权重分配
主动介入接管频次下设 4 个四级指标:白天快速路主动介入接管频次、夜晚快速路主动介入接管频次、白天高速路主动介入接管频次和夜晚高速路主动介入接管频次。各个四级指标权重如表 1-21 所示。
表 1- 21 主动介入接管频次所包含四级指标权重
1.2.4.13. 横向控制舒适度权重分配
横向控制舒适度下设 4 个四级指标:白天快速路横向控制舒适度、夜晚快速路横向控制舒适度、白天高速路横向控制舒适度和夜晚高速路横向控制舒适度。各个四级指标权重如表 1-22 所示。
表 1- 22 横向控制舒适度所包含四级指标权重
1.2.4.14. 纵向控制舒适度权重分配
纵向控制舒适度下设 4 个四级指标:白天快速路纵向控制舒适度、夜晚快速路纵向控制舒适度、 白天高速路纵向控制舒适度和夜晚高速路纵向控制舒适度。各个四级指标权重如表 1-23 所 示。
表 1- 23 纵向控制舒适度所包含四级指标权重
1.3. 算分方法
领航行车辅助总得分根据一级指标得分及权重计算得出,保留小数点后两位,计算方法如式 1-1 所示。
式中,S 为领航行车辅助的总得分,i 为一级指标序号。Si 和bi 分别为序号为 i 的一级指标得 分及权重。
1.3. 1 一级指标得分计算方法
一级指标得分根据二级指标得分及权重计算得出,保留小数点后两位,计算方法如式 1-2 所示。
式中,Si 为一级指标得分,i 为一级指标序号,j 为二级指标序号, ni 为二级指标数量。Sij、 bij分别为二级指标的得分和对应二级指标的权重。
1.3.2 二级指标得分计算方法
二级指标得分根据三级指标得分及权重计算得出,保留小数点后两位,计算方式如式 1-3 所示。

式中,Sij为二级指标得分。i 为一级指标序号,j 为二级指标序号,z 为三级指标序号,nij 为 三级指标的数量。Sijz 、bijz分别为三级指标的得分和对应三级指标的权重。
1.3.3 三级指标得分计算方法
三级指标得分根据四级指标得分及权重计算得出,保留小数点后两位,计算方式如式 1-4 所示。

式中,Sijz为三级指标得分。i 为一级指标序号,j 为二级指标序号,z 为三级指标序号,q 为 四级指标的序号,nijz为四级指标数量。Sijzq、bijzq分别为四级指标的得分和对应四级指标的权重。
1.3.4 四级指标得分计算方法
四级指标得分根据测试用例得分及权重计算得出,保留小数点后两位,计算方式如式 1-5 所示。
式中,Sijzq四级指标得分。i 为一级指标序号,j 为二级指标序号,z 为三级指标序号,q 为四级指标的序号,m 为测试用例序号, nijzq为测试用例数量。Sijzqm 、bijzqm分别为测试用例的得分和对应四级指标的权重。
其中测试用例如涉及舒适、安全、效率,则需要根据舒适、安全、效率的得分及其权重进行加权。
仿真测试设置流程合规性审核和结果通过性评价,涉及到 2.5. 1.2.2 、2.5. 1.2.3 、2.5.2.2.2、2.5.2.2.3 、2.5.3. 1.3 、2.5.3.2. 1 小节 6 个测试场景。
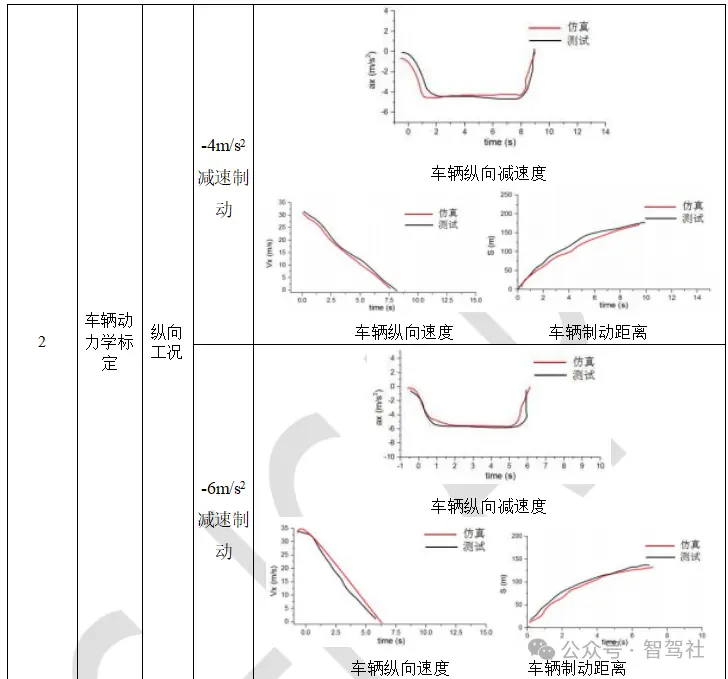
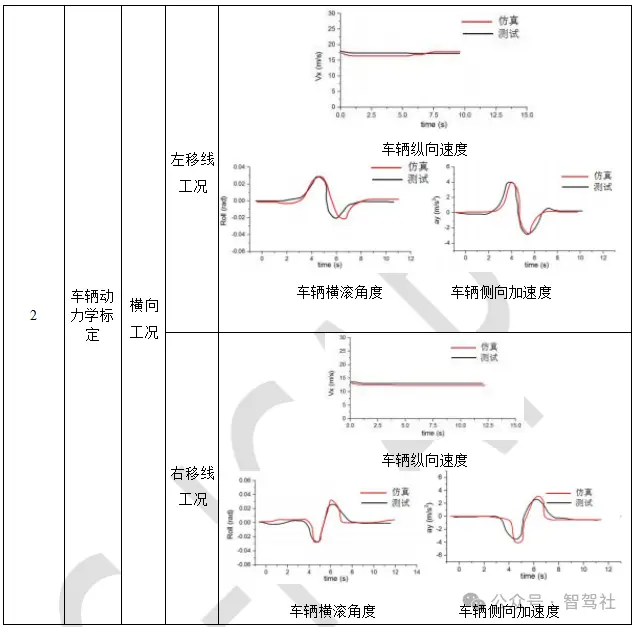
流程合规性审核得分说明:厂商能够提供仿真测试能力流程合规的证明,需参照测试流程审核报告模板对关键信息进行陈述。测试流程审核报告应包括所采用的核心软硬件、车辆动力学标定结果对比、被测设备、信号流示意图等四大部分,各部分满分 25 分,根据内容完整性、合理性、真实性综合评价。全部提供且符合要求则该项得 100 分。
结果通过性评价得分说明:仿真测试能力结果通过性审核需提供相对应的报告,包含测试过 程中的照片(平台配置、测试执行)、测试时间、测试地点、测试人员、以及各仿真场景下测试结果的数据分析曲线等。
1.3.4.1 前方遇静止障碍物得分说明
需要重复进行 3 次,取表现最差的一次作为最终成绩。
1.3.4. 1. 1 白天-弯道-静止乘用车、夜晚-弯道-静止车辆
1.3.4. 1.2 白天-直道-虚线-静止障碍物
同 1.3.4. 1. 1 白天-弯道-静止乘用车、夜晚-弯道-静止车辆得分说明。
1.3.4.2 前方遇缓行车辆得分说明
1.3.4.2. 1 白天-弯道-虚线-前方乘用车缓行
需要重复进行 3 次,取表现最差的一次作为最终成绩。
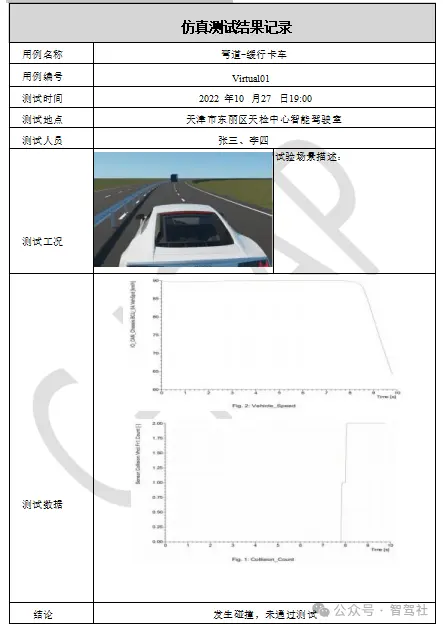
1.3.4.2.2 弯道-缓行卡车
同 1.3.4.2. 1. 白天-弯道-虚线-前方乘用车缓行得分说明。
1.3.4.2.3 白天-直道-双车道拥堵变为相邻车道顺畅
同 1.3.4.2. 1. 白天-弯道-虚线-前方乘用车缓行得分说明。
1.3.4.3 前方遇切入车辆得分说明
需要重复进行 3 次,取表现最差的一次作为最终成绩。
同 1.3.4.2. 1. 白天-弯道-虚线-前方乘用车缓行得分说明。
1.3.4.4 前方遇道路施工得分说明
需要重复进行 3 次,取表现最差的一次作为最终成绩。
1.3.4.4. 1 白天-直道-施工区域(斜置锥桶)
同 1.3.4. 1. 1 白天-弯道-静止乘用车、夜晚-弯道-静止车辆得分说明
1.3.4.4.2 白天-直道-施工区域(斜置锥桶)-相邻车道有障碍车
1.3.4.5 前方遇事故区域得分说明
1.3.4.5. 1 前方遇事故车辆
需要重复进行 3 次,取表现最差的一次作为最终成绩。
同 1.3.4. 1. 1 白天-弯道-静止乘用车、夜晚-弯道-静止车辆得分说明
1.3.4.5.2 白天-斜置货车侵占车道
同 1.3.4. 1. 1 白天-弯道-静止乘用车、夜晚-弯道-静止车辆得分说明
1.3.4.5.3 中雨-直道-前方追尾乘用车并出现打伞行人
同 1.3.4. 1. 1 白天-弯道-静止乘用车、夜晚-弯道-静止车辆得分说明
1.3.4.6 主路汇入匝道得分说明
1.3.4.6. 1 白天-无其他干扰车辆
需要重复进行 3 次,取表现最差的一次作为最终成绩。
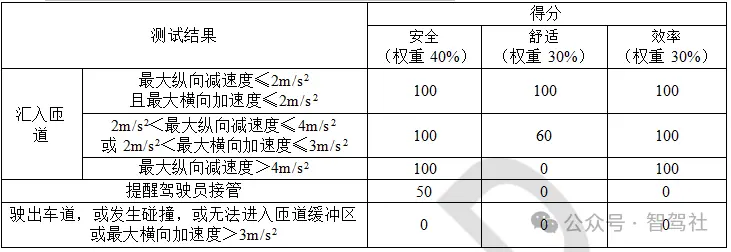
1.3.4.6.2 白天-匝道口有静止车辆
需要重复进行 3 次,取表现最差的一次作为最终成绩。
1.3.4.6.3 主路最右侧车道有连续行驶车流
1.3.4.7 匝道汇入主路得分说明
1.3.4.7. 1 白天-左侧邻车道后方有非连续行驶车流
同 1.3.4.6.3.主路最右侧车道有连续行驶车流
1.3.4.8 变道成功率得分说明
1.3.4.8. 1 白天快速路变道成功率
试验车辆在公共道路测试中所有快速道路中领航行车辅助模式下自动变道成功次数所占的 比例。其中变道成功是指在领航行车辅助模式下,系统根据交通情况自动控制车辆转向操作,提 前激活转向灯,按照交通法规允许的方式合理变道的过程。变道失败是指在领航行车辅助模式下, 系统未能合理控制车辆变道的行为,如未点亮转向灯、变道中途返回原车道、点亮转向灯后未变 道等。变道行为不包括汇入匝道时的变道行为,同时,若变道失败时发生了系统提醒接管或驾驶 员主动介入,本次接管不计入接管频次指标的评价结果。
1.3.4.8.2 夜晚快速路变道成功率
同 1.3.4.8. 1 白天快速路变道成功率。
1.3.4.8.3 白天高速路变道成功率
试验车辆在公共道路测试中所有高速路中领航行车辅助模式下自动变道成功次数所占的比 例。其中变道成功是指在领航行车辅助模式下,系统根据交通情况自动控制车辆转向操作,提前 激活转向灯,按照交通法规允许的方式合理变道的过程。变道失败是指在领航行车辅助模式下, 系统未能合理控制车辆变道的行为,如未点亮转向灯、变道中途返回原车道、点亮转向灯后未变 道等。变道行为不包括汇入匝道时的变道行为,同时,若变道失败时发生了系统提醒接管或驾驶 员主动介入,本次接管不计入接管频次指标的评价结果。
1.3.4.8.4 夜晚高速路变道成功率
同 1.3.4.8.3 白天高速路变道成功率。
1.3.4.8.5 变道成功率得分
1.3.4.9 汇入匝道成功率得分说明
1.3.4.9. 1 白天快速路汇入匝道成功率
试验车辆在公共道路测试中所有快速路中领航行车辅助模式下成功汇入正确的目标匝道的 比例。其中汇入匝道成功是指从主路最右侧车道开始驶入最终目标匝道的过程,包括该过程中的 变道,匝道口选择等。若匝道为 Y 型匝道等含多次匝道口汇入过程,则汇入匝道成功是指以领 航行车辅助模式驶入最后一个正确的匝道口为止。同时,若汇入匝道失败时发生了系统提醒接管 或驾驶员主动介入,本次接管不计入接管频次指标的评价结果。

1.3.4.9.2 夜晚快速路汇入匝道成功率
同 1.3.4.9. 1 白天快速路汇入匝道成功率。
1.3.4.9.3 白天高速路汇入匝道成功率
试验车辆在公共道路测试中所有高速路中领航行车辅助模式下成功汇入正确的目标匝道的 比例。其中汇入匝道成功是指从主路最右侧车道开始驶入最终目标匝道的过程,包括该过程中的 变道,匝道口选择等。若匝道为 Y 型匝道等含多次匝道口汇入过程,则汇入匝道成功是指以领 航行车辅助模式驶入最后一个正确的匝道口为止。同时,若汇入匝道失败时发生了系统提醒接管 或驾驶员主动介入,本次接管不计入接管频次指标的评价结果。

1.3.4.9.4 夜晚高速路汇入匝道成功率
同 1.3.4.9.3 白天快速路汇入匝道成功率。
1.3.4.9.5 汇入匝道成功率得分
1.3.4.10 汇入主路成功率得分说明
1.3.4.10. 1 白天快速路汇入主路成功率
试验车辆在公共道路测试中所有快速路中领航行车辅助模式下成功汇入主路的比例。其中, 汇入主路成功是指从匝道出口驶入目标高速主路的过程,包括该过程中的车速控制、遵守交通规则、变道、驶入主路等。同时,若汇入主路失败时发生了系统提醒接管或驾驶员主动介入,本次接管不计入接管频次指标的评价结果。
1.3.4.10.2 夜晚快速路汇入主路成功率
同 1.3.4.10. 1 白天快速路汇入主路成功率。
1.3.4.10.3 白天高速路汇入主路成功率
试验车辆在公共道路测试中所有高速路中领航行车辅助模式下成功汇入主路的比例。其中, 汇入主路成功是指从匝道出口驶入目标高速主路的过程,包括该过程中的车速控制、遵守交通规则、变道、驶入主路等。同时,若汇入主路失败时发生了系统提醒接管或驾驶员主动介入,本次 接管不计入接管频次指标的评价结果。
1.3.4.10.4 夜晚高速路汇入主路成功率
同 1.3.4.10.3 白天高速路汇入主路成功率。
1.3.4.10.5 汇入主路成功率得分
1.3.4.11 系统提醒接管频次得分说明
1.3.4.11. 1 白天快速路系统提醒接管频次
试验车辆在公共道路测试的快速路总里程中,领航行车辅助系统提醒接管、功能降级(降为居中保持和ACC)、功能退出的次数之和为 n1 ,测试总里程为 D1 ,其中不包括补能、休息等与快速路测试无关的事件所行驶的里程。
其中, 以下情况导致的系统提醒接管不计入本项接管频次得分计算:
i. 公共道路测试中试验车辆所在车道发生道路施工、交通事故;
ii. 公共道路测试中因变道失败、汇入匝道/主路失败时系统提醒的接管。
1.3.4.11.2 夜晚快速路系统提醒接管频次
同 1.3.4.11. 1 白天快速路系统提醒接管频次。
1.3.4.11.3 白天高速路系统提醒接管频次
试验车辆在公共道路测试的高速路总里程中,领航行车辅助系统提醒接管、功能降级(降为居中保持和ACC)、功能退出的次数之和为 n1 ,测试总里程为 D1 ,其中不包括补能、休息等与高速路测试无关的事件所行驶的里程。
其中, 以下情况导致的系统提醒接管不计入本项接管频次得分计算:
i. 公共道路测试中试验车辆所在车道发生道路施工、交通事故;
ii. 公共道路测试中因变道失败、汇入匝道/主路失败时系统提醒的接管。
1.3.4.11.4 夜晚高速路系统提醒接管频次
同 1.3.4.11.3 白天高速路系统提醒接管频次。
1.3.4.11.5 系统提醒接管频次得分

1.3.4.12 主动介入接管频次得分说明
1.3.4.12.1 白天快速路主动介入接管频次
试验车辆在公共道路测试的快速路总里程中,驾驶员因紧急情况主动介入车辆控制的次数之和为 n1 ,测试总里程为 D1 ,其中不包括补能、休息等与快速路测试无关的事件所行驶的里程。
其中,以下情况导致的驾驶员主动介入不计入本项接管频次得分计算:
i. 公共道路测试中试验车辆所在车道发生道路施工、交通事故;
ii.公共道路测试中因变道失败、汇入匝道/主路失败时驾驶员主动介入的接管。
1.3.4.12.2 夜晚快速路主动介入接管频次
同 1.3.4.12.1 白天快速路主动介入接管频次。
1.3.4.12.3 白天高速路主动介入接管频次
试验车辆在公共道路测试的高速路总里程中,驾驶员因紧急情况(危险场景、走错路等)主动介入车辆控制的次数之和为 n1 ,测试总里程为 D1 ,其中不包括补能、休息等与高速路测试无关的事件所行驶的里程。
其中, 以下情况导致的驾驶员主动介入不计入本项接管频次得分计算:
i. 公共道路测试中试验车辆所在车道发生道路施工、交通事故;
ii.公共道路测试中因变道失败、汇入匝道/主路失败时驾驶员主动介入的接管。
1.3.4.12.4 夜晚高速路主动介入接管频次
同 1.3.4.12.3 白天高速路主动介入接管频次。
1.3.4.12.5 主动介入接管频次得分
1.3.4.13 横向控制舒适度得分说明
1.3.4.13.1 白天快速路横向控制舒适度
试验车辆在公共道路测试的快速路总里程中,车辆在领航行车辅助激活状态下,横向加速度 2m/s2<a≤3m/s2 的次数为 n1 ,横向加速度 3m/s2<a 的次数为 n2 ,测试总里程为 D1 ,其中不包括补能、休息等与快速路测试无关的事件所行驶的里程。
1.3.4.13.2 夜晚快速路横向控制舒适度
同 1.3.4.13.1 白天快速路横向控制舒适度
1.3.4.13.3 白天高速路横向控制舒适度
试验车辆在公共道路测试的高速路总里程中,车辆在领航行车辅助激活状态下,横向加速度2m/s2<a≤3m/s2 的次数为 n1 ,横向加速度 3m/s2<a 的次数为 n2 ,测试总里程为 D1 ,其中不包括补能、休息等与快速路测试无关的事件所行驶的里程。
1.3.4.13.4 夜晚高速路横向控制舒适度
同 1.3.4.13.3 白天高速路横向控制舒适度
1.3.4.13.5 横向控制舒适度得分
1.3.4.14 纵向控制舒适度得分说明
1.3.4.14.1 白天快速路纵向控制舒适度
试验车辆在公共道路测试的快速路总里程中,车辆在领航行车辅助激活状态下,纵向减速度 2m/s2<a≤4m/s2 的次数为 n1 ,纵向减速度 4m/s2<a 的次数为 n2 ,测试总里程为 D1 ,其中不包括补能、休息等与快速路测试无关的事件所行驶的里程。
1.3.4.14.2 夜晚快速路纵向控制舒适度
同 1.3.4.14. 1 白天快速路纵向控制舒适度。
1.3.4.14.3 白天高速路纵向控制舒适度
试验车辆在公共道路测试的高速路总里程中,车辆在领航行车辅助激活状态下,纵向减速度 2m/s2<a≤4m/s2 的次数为 n1 ,纵向减速度 4m/s2<a 的次数为 n2 ,测试总里程为 D1 ,其中不包括 补能、休息等与快速路测试无关的事件所行驶的里程。
1.3.4.14.4 夜晚高速路纵向控制舒适度
同 1.3.4.14.3 白天高速路纵向控制舒适度。
1.3.4.14.5 纵向控制舒适度得分
2. 测试方法
2.1. 适用范围
本规范适用于M1类乘用车。
2.2. 规范性引用文件
下列文件中的条款通过本规范的引用而构成本规范的条款。凡是注日期的引用文件,其随后 所有的修改单(不包括勘误的内容)或修订版均不适用于本规范。凡是不注日期的引用文件,其 最新版本适用于本规范。
ISO 15622-2018 《 Intelligent transport systems — Adaptive Cruise Control systems —Performance requirements and test procedures》
ISO 22178-2009 《 Intelligent transport systems — Low speed following (LSF) systems —Performance requirements and test procedures》
ISO 11270 - 2010 《 Intelligent transport systems — Lane keeping assistance systems (LKAS) — Performance requirements and test procedures》
ECE R79 《Uniform provisions concerning the approval of vehicles with regard to steering equipment》
GRVA-ACSF 《Uniform provisions concerning the approval of vehicles with regard to Automated Lane Keeping Systems》
GB/T 20608-2006 《智能运输系统 自适应巡航控制系统 性能要求与检测方法》 GB 5768.3 《道路交通标志和标线 第 3 部分:道路交通标线》
ISO 8855-1991 《Road vehicles - Vehicle dynamics and road-holding ability - Vocabulary》
2.3. 术语定义
试验车辆 Vehicle Under Test
可同时对横向运动和纵向运动进行持续控制并将依照本试验规程进行测试的车辆。
目标车辆 Vehicle Target
本测试技术规程中所指定使用的目标车辆。
碰撞时间 Time To Collision
保持当前时刻的运动状态,试验车辆与目标车辆、成年假人目标、自行车目标物或踏板式摩托车目标物发生碰撞所需的时间。
最小风险策略 Minimum Risk Manoeuvre
在系统发出接管请求后,驾驶员长时间不接管,系统为降低风险而进行的控制策略。此状态下,系统应至少保持对车辆的横向控制。
2.4. 试验条件
2.4. 1. 封闭场地试验条件
2.4.1.1. 试验场地条件
1)试验路面要求平整、坚实;
2)试验路面要求压实并且无可能造成传感器异常工作的不规则物(如大的倾角、裂缝、井盖或是具有反射能力的螺栓等);
3)车道宽度为 3.75m ,车道线为白色实线或白色虚线,若为白色虚线,则虚实比为 6/9。
4)道路两侧存在护栏,对向车道间存在隔离带。
2.4.1.2. 试验天气条件
1) 自然光照条件:对于在自然光条件下进行的试验,整个试验区域内的照明情况一致、光照强度不低于 2000Lux。
2)夜晚光照条件:对于在夜间光照条件下的试验,整个试验区域内的光照条件不高于 30Lux。
3)风速:风速不大于10m/s。
2.4.2. 开放道路试验条件
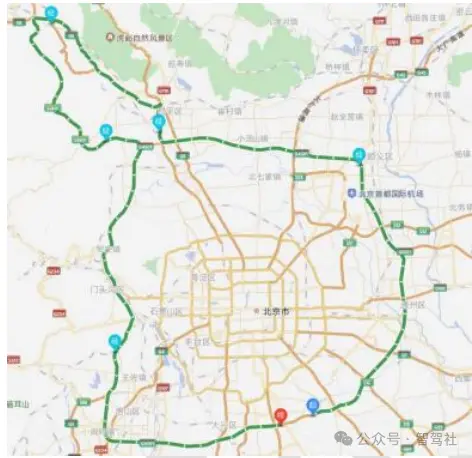
2.4.2.1. 北京市高速路测试路线
北京市测试路线为由国家智能汽车与智慧交通(京冀)示范区亦庄基地至京承高速路线如图2-1 所示:
具体路线为:太和收费站——南六环——东六环——北六环——楼自庄桥——京新高速—— 邓庄桥——京藏高速——营城子桥——京礼高速——土城村西桥——西六环——南六环——南 大红门收费站(约 255km)
图 2-1 北京市高速路测试路线图测试安排
2.4.2.2. 北京市快速路测试路线
北京市具体路线为:北京市兴亦路与京台高速入口——京台高速——旧宫新桥——南五环路 ——东五环路——平房桥——机场第二高速——管头桥京平高速——温榆桥——机场高速—— 五元桥——北五环——东五环——南五环——亦庄桥——南五环与三台山路交口向南方向(约 80km)
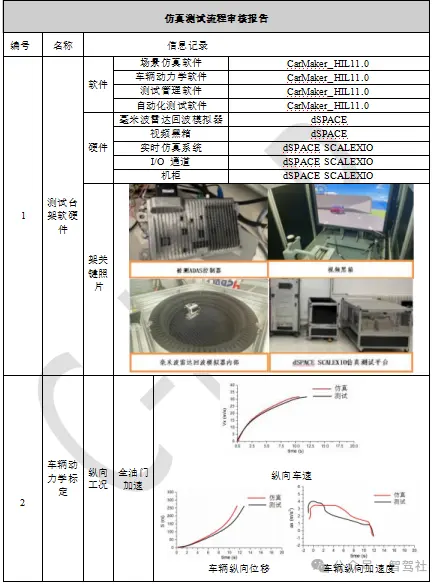
图 2-2 北京市快速路测试路线图测试安排
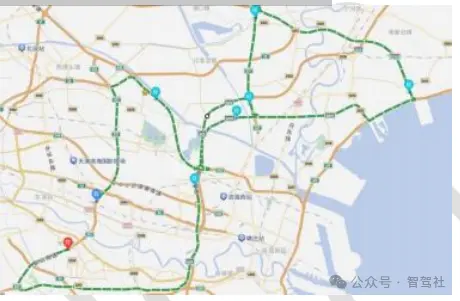
2.4.2.3. 天津市高速路测试路线
具体路线为:金桥收费站(S51 宁静高速入口东北向)——S51宁静高速(蓟汕高速)——津宁互通立交桥——S2 津宁高速——田辛庄互通立交桥——S30京津高速——北环铁路立交桥——G25唐津高速——唐津高速互通立交桥——S21塘承高速——塘承高速互通立交桥——G0111 秦滨高速——大神堂互通立交桥——G2502宾保高速——宾保高速互通立交桥——S21 塘承高速——塘承高速互通立交桥——G0111秦滨高速——北环铁路立交桥——G25唐津高速——葛沽互通立交桥——S50 津晋高速——津晋互通立交桥——S51宁静高速(蓟汕高速)——辛庄收费站(S51宁静高速出口会展海河通道方向)(约198.0km)
图 2-3 天津市高速路测试路线图测试安排
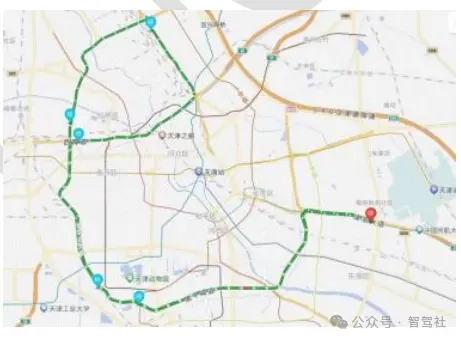
2.4.2.4. 天津市快速路测试路线
图 2-4 天津市快速路测试路线图测试安排
具体路线为:津滨大道与外环东路交叉口(东丽区)——津滨大道——津昆桥——昆仑路— —黑牛城道——红旗南路——密云路——青云桥——西青道——志成路——铁东北路——辰泰 桥——南仓道——西横堤——密云路——红旗南路——黑牛城道——昆仑路——津滨大道——津滨大道与外环东路交叉口(东丽区)(约 78.9km)
连续通行能力的开放道路试验选择北京或天津的高速路快速路进行,每次领航行车辅助系统的开放道路试验仅选取一个城市的路线进行。
快速路和高速路的测试路线分别在以下三个时间开始测试,每个测试时段执行一次测试,即北京市的快速路和高速路线分别测试 3 次,测试路线共计 6 次测试。
白天测试路线起点出发时间 7 :50-8:10
白天测试路线起点出发时间 13:50-14:10 夜间测试路线起点出发时间 19:50-20:10
2.4.3. 设备要求
2.4.3.1. 封闭场地测试设备要求
2.4.3.1.1 测试设备要满足动态数据的采样及储存,采样和存储的频率至少为 100Hz 。目标车辆及 试验车辆之间使用 DGPS 时间进行数据同步。
2.4.3.1.2 数据采集和目标物控制精度
目标物和试验车辆在试验过程中数据采集精度至少满足以下要求:
1)速度精度 0. 1km/h;
2)横向和纵向位置精度 0.03m;
3)纵向加速度精度 0. 1m/s2;
4)方向盘角速度精度 1.0°/s。 目标物控制精度:
1)位置精度 0.05m;
2)速度精度 2km/h;
3)加速度精度 0.25m/s2。
2.4.3.1.3 滤波要求
2.4.3.1.3.1 位置和速度采用原始数据,不进行滤波;
2.4.3.1.3.2 加速度采用 12 极无阶巴特沃斯滤波器过滤,截止频率为 10Hz;
2.4.3.1.3.3 目标车辆要求
目标车辆应为M1 类乘用车或用于替代实际M1 类乘用车的软目标物。软目标物用于替代真实车辆(包含视觉、雷达、激光雷达和 PMD 属性)。对于软目标物规格的要求,参照 ISO19206 要求。如图 2-5 所示。
图 2-5 车辆软目标物外观图
2.4.3.2. 开放道路测试设备要求
公共道路试验过程中至少记录以下数据:
(1)试验车辆的控制模式,例如手动控制模式、领航行车辅助系统控制模式等;
(2)试验车辆周边的交通状态视频信息;
(3)试验安全员及人机交互状态(试验人员面部、仪表盘、方向盘、中控屏、踏板等)的视频及语音监控信息;
(4)试验车辆运动状态参数
a.试验时间轴
b.车辆横纵向速度
c.车辆横纵向加速度
试验设备精度应满足如下要求:
(1)运动状态、采样和存储的频率:
a.试验设备对试验车辆运动状态采样频率至少为 50Hz;
b.视频采样帧率至少为 30fps;
(2)视频采集设备分辨率不小于 1920*1080 像素点;
(3)试验车辆速度采集精度至少为 0. 1km/h;
(4)试验车辆加速度采集精度至少为 0. 1m/s2。
试验设备的安装、运行不应影响试验车辆及其领航行车辅助功能的正常运行。
2.4.4. 试验程序
2.4.4.1. 试验车辆准备工作
2.4.4.1.1. 轮胎状态确认
使用与厂家指定轮胎配置(供应商、型号、大小、速度及载荷等级)一致的全新原厂轮胎来进行试验。在确保与厂家指定轮胎配置(供应商、型号、大小、速度及载荷等级)相同的情况下,可以允许换用厂家或厂家指定代理商所提供的替代轮胎。将轮胎充气至厂家推荐的标准冷态气压,此冷态气压至少适用于普通载荷状态。
2.4.4.1.2.整车状态确认
2.4.4.1.2.1. 确保试验车辆内已载有备胎(如果有此配置)和随车工具。车内不应再有其他物品。
2.4.4.1.2.2. 确保已依照厂家推荐的当前载荷状态下的轮胎压力对所有轮胎充气。
2.4.4.1.2.3. 测量车辆前后轴荷并计算车辆总质量,将此重量视为整车整备质量并记录。
2.4.4.1.3. 设备安装及配载
2.4.4.1.3. 1.安装试验用仪器设备。
2.4.4.1.3.2.根据配载质量要求(200kg 扣除试验驾驶员及测试设备质量)对车辆进行配载,安装牢靠。
2.4.4.1.3.3.在包含驾驶员的情况下,测量车辆前后轴荷。
2.4.4.1.3.4. 将其与车辆整备质量做比较。
2.4.4.1.3.5.测得的车辆总质量与整备质量+200kg 之间的差距应在±1%之内,前后轴荷分布与满油空载车辆轴荷分布之间的差距应小于 5% ,如果车辆实际情况不符合此要求,在对车辆性能没有影响的情况下对配载进行调整,并在调整之后确保固定牢靠。
2.4.4.1.3.6. 重复 2.4.4. 1.3.3 到 2.4.4. 1.3.5 直至车辆前后轴荷和总质量可以达到要求。仔细调整配载尽可能的接近车辆原厂属性,记录最终轴荷。
2.4.4.2. 试验准备工作
2.4.4.2.1. 功能设置
确保自动紧急制动系统(AEB)开启,针对有不同跟车距离和报警级别的系统,试验开始之前,将跟车距离和报警级别设置为中间级别或中间级别的更高一级(同样条件下,跟车时距更近、 报警时间更晚的配置)。配置示意如图 2-6 、图 2-7 所示。
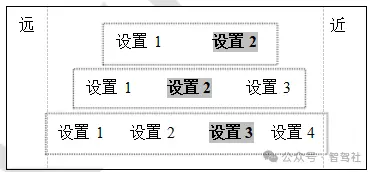
图2- 6 跟车距离设置示意图
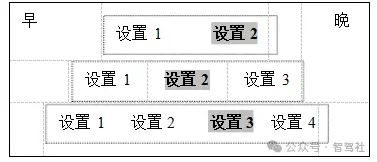
图 2- 7 报警时间设置示意图
2.4.4.2.2. 主动机罩系统
当车辆的主动机罩系统失效后不影响系统正常工作时,封闭场地试验前失效此系统。 公共道路试验期间应保证主动机罩系统正常工作。
2.4.4.2.3. 安全气囊系统
当车辆的安全气囊系统失效后不影响系统正常工作时,封闭场地试验前失效此系统。 公共道路试验期间应保证主动机罩系统正常工作。
2.5. 试验项目
2.5.1. 车道占用换道能力
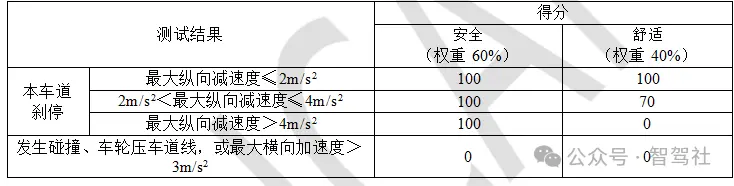
2.5.1.1. 前方遇静止障碍物
2.5.1.1.1 白天-弯道-静止乘用车、夜晚-弯道-静止车辆
(1)测试场景
测试道路为一条长直道和弯道的组合,连接处平滑过渡,弯道长度应满足车辆行驶时间大 于 5s ,一侧车道线应为白色虚,无其他交通参与者。试验车辆由长直道驶向弯道。
(2)测试方法
试验车辆在领航行车辅助系统激活条件下,分别设置车速 80km/h 、100km/h ,当速度稳定后车辆由直道进入弯道。分别在白天和夜间进行测试,静止车辆处于弯道出口处,且摆放在道路中间。如图 2-8 所示。
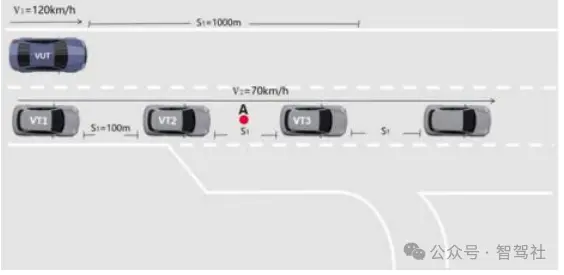
图 2-8 前方遇静止障碍物测试场景示意图
上述试验分别在白天和夜晚各进行一次。
(3)试验退出条件
a)若发生碰撞,发生碰撞时试验车辆速度大于 50km/h,或试验车辆车速降低量小于 5km/h, 则该项目测试终止。
b)若白天场景测试不通过,夜间场景不进行测试。
c)当 80km/h 、100km/h 试验车辆分别与目标车辆距离为 45m 、55m 时,车辆无减速试验终 止。
2.5.1.1.2 白天-直道-静止障碍物
(1)测试场景
测试道路为至少包含两条车道的长直道,中间车道线为白色虚线,车道宽 3.75m,试验车辆在任一车道行驶,试验车辆的前方存在静止障碍物,摆放在车道中间。障碍物为褐色纸箱或白色泡沫箱,尺寸不小于 60cm*60cm*60cm。
(2)测试方法
试验车辆在领航驾驶辅助系统激活条件下,分别设置车速 60km/h 、80km/h ,当试验车辆速度达到稳定状态,且距离障碍物距离大于 200m 时试验开始。如图 2-9 所示。
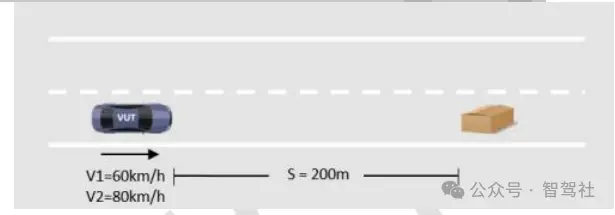
图 2-9 白天-直道-静止障碍物测试场景示意图
(3)试验退出条件
a)试验车辆与障碍物发生碰撞,则该项目测试终止。b)试验车辆刹停后不再变道,则单次试验结束。
c)试验车辆换道成功,则单次试验结束。
2.5.1.2. 前方遇缓行车辆
2.5.1.2.1. 白天-弯道-虚线-前方乘用车缓行
(1)测试场景
测试道路为至少包含两条车道的弯道,弯道半径为 250-300m ,中间车道线为虚线,试验车辆驶向前方目标车辆。
(2)测试方法
试验车辆在领航行车辅助系统激活条件下,分别设置车速 80km/h 和 100km/h ,当试验车辆速度达到稳定状态,且距离目标车辆距离大于 200m 时试验开始。 目标车辆摆放在道路中间, 车速 40km/h 。如图 2-10 所示。
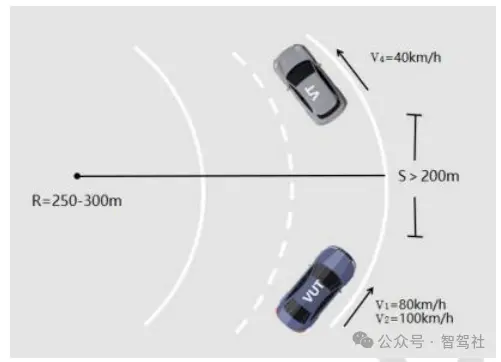
图 2-10 白天-弯道-虚线-前方乘用车缓行测试场景示意图
(3)试验退出条件
a)若发生碰撞,发生碰撞时试验车辆速度大于 50km/h,或试验车辆车速降低量小于 5km/h, 则该项目测试终止。
b)当 80km/h 、100km/h 试验车辆分别与目标车辆距离为 45m 、55m 时,车辆无减速试验终止。
2.5.1.2.2. 弯道-缓行卡车(仿真场景)
(1)测试场景
测试道路为至少包含两条车道的弯道,弯道半径为 650m ,中间车道线为虚线,试验车辆本车到前方遇到缓慢行驶卡车。
(2)测试方法
试验车辆在领航行车辅助系统激活条件下,分别设置车速 80km/h 、120km/h ,当试验车辆速度达到稳定状态,且距离目标车辆距离大于 200m 时试验开始。 目标车辆摆放在道路中间,车速 60km/h 。如图 2-11 所示。
图 2-11 弯道-缓行卡车测试场景示意图
(3)试验退出条件
a)车辆发生碰撞,则该项目测试终止。
b)试验车辆稳定跟车,则单次试验结束。
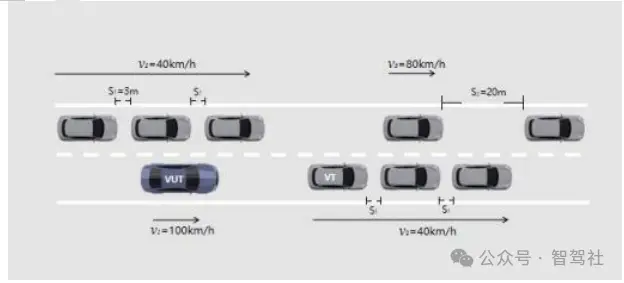
c)车辆变道成功或完成对目标车辆的超越,则单次试验结束。2.5. 1.2.3. 白天-直道-双车道拥堵变为相邻车道顺畅(仿真场景)
(1)测试场景
测试道路为至少包含两条车道的直道,中间车道线为虚线,试验车辆在最右侧车道,前方两车道均有乘用车车流缓行,本车实现稳定跟车后,左车道 5 辆车组成的非连续车流由拥堵缓行变为顺畅通行。
(2)测试方法
试验车辆在领航行车辅助系统激活条件下,设置车速 100km/h ,周围车流车速设置 40km/h,车流间距3m,本车实现稳定跟车后左车道非连续车流车速变为 80km/h ,快速驶过。如图 2-12 所示。
图 2-12 白天-直道-双车道拥堵变为相邻车道顺畅测试场景示意图
(3)试验退出条件
a)车辆发生碰撞或发出接管请求,则该项目测试终止。
b)试验车辆未变道成功,则单次试验结束。
c)试验车辆变道成功,则单次试验结束。
2.5.1.3. 前方遇切入车辆
2.5.1.3.1. 白天-直道-虚线-前方乘用车切入
(1)测试场景
测试道路为至少包含两条车道的长直道,中间车道线为白色虚线,车道宽度 3.75m。试验车辆和目标车辆在各自车道内行驶,在试验车辆接近目标车辆过程中,目标车辆切入试验车辆所在车道。如图 2-13 所示。
图 2- 13 白天-直道-虚线-前方乘用车切入测试场景示意图
(2)测试方法
系统激活后,设定车速由低到高依次进行试验。试验车辆在距离目标物 200m 前达到预期车速,并在车道内稳定行驶,目标车辆以某一速度匀速沿相邻车道中间匀速同向行驶并快速切入试验车辆所在车道,并沿车道中间行驶。过程中驾驶员双手握住方向盘,不得干扰系统的正常驾 驶。试验车辆设定速度、目标车辆速度、目标车辆切入时与试验车辆的距离、目标车辆切入过程持续时间如表 2-1 所示。
表 2- 1 前车切入识别与响应测试参数表
(3)试验退出条件
a)若发生碰撞,发生碰撞时试验车辆速度大于 50km/h,或试验车辆车速降低量小于 5km/h, 则该项目测试终止。
b)当试验车与目标车辆距离为 6m 时,车辆无减速试验终止。
2.5.2. 突发情况换道能力
2.5.2.1.前方遇道路施工
2.5.2.1.1. 白天-直道-施工区域(斜置锥桶)
(1)测试场景
测试道路为至少包含两条车道的长直道,中间车道线为虚线,在车道中间放置倾斜于道路方向 30 度夹角的 5 个锥形交通路标(推荐尺寸:50cm*35cm)作为障碍物,试验车辆匀速驶向前方障碍物。
(2)测试方法
试验车辆在领航行车辅助系统激活条件下,设置车速 80km/h ,当试验车辆速度达到稳定状态,且距离锥桶距离大于 200m 时试验开始。如图 2-14 所示。
图 2-14 白天-直道-施工区域(斜置锥桶)测试场景示意图
(3)试验退出条件
a)试验车辆完成换道动作,则单次试验结束;
b)试验车辆在无法完成换道动作,则该项目测试终止。
2.5.2. 1.2. 白天-直道-施工区域(斜置锥桶)-相邻车道有障碍车
(1)测试场景
测试道路为至少包含两条车道的长直道,中间车道线为虚线,在车道中间放置倾斜于道路方向 30 度夹角的 5 个锥形交通路标(推荐尺寸:50cm*35cm)作为障碍物,试验车辆匀速驶向 前方障碍物。
(2)测试方法
试验车辆在领航行车辅助系统激活条件下,设置车速 80km/h ,当试验车辆速度达到稳定状态,且距离锥桶距离大于200m时试验开始。邻近车道内目标车辆在测试车辆前方3m 至试验车辆后方3m 的区域内行驶。如图 2-15 所示。
图 2- 15 白天-直道-施工区域(斜置锥桶)-相邻车道有障碍车测试场景示意图
(3)试验退出条件
a)试验车辆无法完成换道,则单次试验结束;
b)试验车辆驶出车道或发生碰撞,则该项目测试终止。
2.5.2.2. 前方遇事故区域
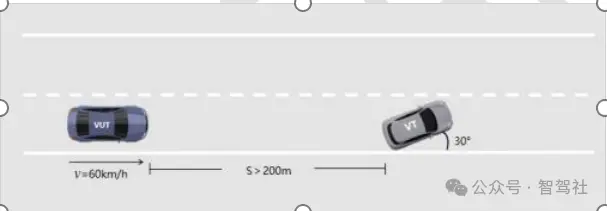
2.5.2.2. 1. 前方遇事故车辆
测试道路为至少包含两条车道的长直道,在车道中间横置静止的目标车辆作为障碍物,试验车辆匀速驶向前方障碍物。如图 2-16 所示。
图 2-16 前方遇事故车辆测试场景示意图
(2)测试方法
试验车辆在领航行车辅助系统激活条件下,设置车速 60km/h ,当试验车辆速度达到稳定状态,且与目标车辆距离大于 200m 时试验开始。在道路前方存在目标车辆, 目标车辆与道路夹角 30 °。
(3)退出条件
a)若发生碰撞,发生碰撞时试验车辆速度大于 50km/h,或试验车辆车速降低量小于 5km/h, 则该项目测试终止。
b)当试验车与目标车辆距离为 33m 时,车辆无减速试验终止。
2.5.2.2.2. 白天-斜置货车侵占车道(仿真场景)
(1)测试场景
测试道路为至少包含两条车道的长直道,中间车道线为虚线。
(2)测试方法
试验人员根据系统提示设置终点,且确保路径经过事故区域。试验车辆在领航行车辅助系统 激活条件下,分别设置车速80km/h、120km/h,本车道前方事故区域内斜置白色厢式货车,货车后方150m 处摆放三角警示牌,且货车一端侵入相邻车道10%。当试验车辆车速到达稳定状态,且于三角警示牌相距200m时,试验开始。相邻车道设置至少20 辆车组成的非连续慢行车流,车速保持60km/h,车间距保持30m。如图 2-17 所示。
图 2-17 白天-斜置货车侵占车道测试场景示意图
(3)试验退出条件
a)试验车辆与厢式货车发生碰撞,则该项目测试终止。
b)试验车辆刹停后不再变道,则单次试验结束。
c)试验车辆换道成功,则单次试验结束。
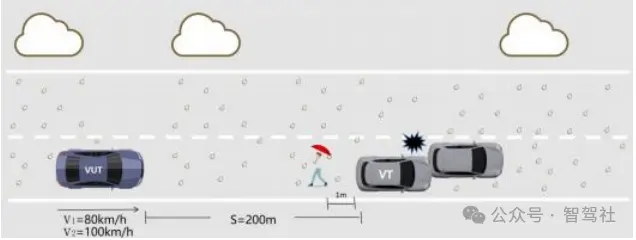
2.5.2.2.3. 中雨-直道-前方追尾乘用车并出现打伞行人(仿真场景)
(1)测试场景
天气为中雨,降雨量为 3mm/h,测试道路为至少包含两条车道的长直道,中间车道线为虚线, 道路摩擦系数为 0.4。
(2)测试方法
试验人员根据系统提示设置终点,且确保路径经过事故区域。试验车辆在领航行车辅助系统 激活条件下,分别设置车速 80km/h 、100km/h ,当试验车辆车速到达稳定状态,且于事故车辆相 距 200m 时,试验开始。本车道前方设置两辆追尾的乘用车,且乘用车后方 1m 处有静止的打伞 行人。如图 2-18 所示。
图 2-18 中雨-直道-前方追尾乘用车并出现行人测试场景示意图
(3)试验退出条件
a)试验车辆与事故车辆或行人发生碰撞,则该项目测试终止。
b) 试验车辆刹停后不再变道,则单次试验结束。
c) 试验车辆换道成功,则单次试验结束。
2.5.3. 导航路线换道能力
2.5.3.1. 主路汇入匝道
2.5.3.1.1. 白天-无其他干扰车辆
(1)测试场景
测试道路为至少包含两条车道的长直道,中间车道线为虚线,试验道路前方存在匝道。
(2)测试方法
试验人员根据系统提示设置终点,且确保路径经过下行匝道。试验车辆在领航行车辅助系统激活条件下,分别设置车速 80km/h 、100km/h 、120km/h ,当试验车辆速度达到稳定状态,且与匝道距离大于 200m 时试验开始。如图 2-19 所示。
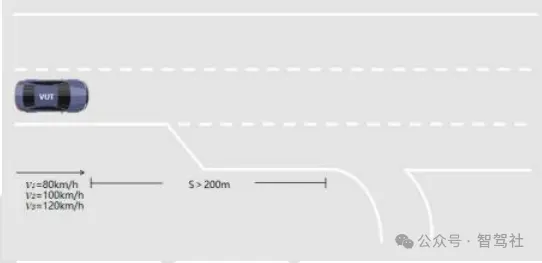
图 2- 19 白天-无其他干扰车辆测试场景示意图
(3)试验退出条件
a)试验车辆完成换道动作,则单次试验结束;
b)试验车辆在无法完成换道动作,则该项目测试终止。
2.5.3. 1.2. 白天-匝道口有静止车辆
(1)测试场景
测试道路为至少包含两条车道的长直道,中间车道线为虚线,试验道路前方存在匝道。
(2)测试方法
试验人员根据系统提示设置终点,且确保路径经过下行匝道。试验车辆在领航行车辅助系统激活条件下,分别设置车速 80km/h 、100km/h 、120km/h ,当试验车辆速度达到稳定状态,且与 匝道距离大于 200m 时试验开始。在匝道入口处存在静止车辆。如图 2-20 所示。
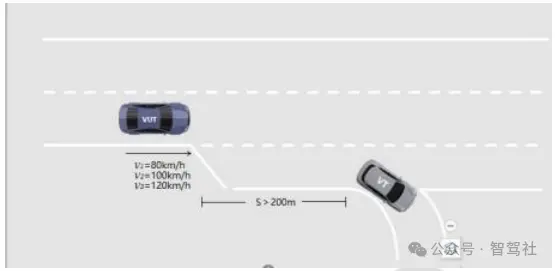
图 2-20 白天-匝道口有静止车辆测试场景示意图
(3)试验退出条件
a)试验车辆在无法完成换道动作,则该项目测试终止。
b)发生碰撞,则该项目测试终止。
c)试验车辆由主路进入缓冲路段后,没有降速试验结束。
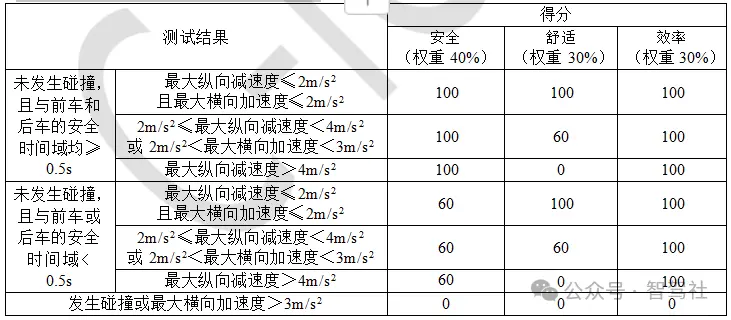
2.5.3. 1.3. 主路最右侧车道有连续快速行驶车流(仿真场景)
(1)测试场景
测试道路为至少包含两条车道的长直道,中间车道线为虚线,试车辆在最左侧车道行驶,道 路前方存在匝道。
(2)测试方法
试验人员根据系统提示设置终点,且确保路径经过下行匝道,试验车辆在领航行车辅助系统激活条件下,设置车速120km/h,在距离匝道口1km处,开始试验。右侧车道设置连续行驶车流,车流速度设置为70km/h,车流内车辆间距为100m。试验车辆中心点到达连续行驶车流所在车道中心线(A点)的时间记为T1,目标车辆(后车、前车)中心点到达A点的时间分别记为T2、T3;安全时间域为T2-T1或T1-T3。如图 2-21 所示。
图 2-21 主路最右侧车道有连续快速行驶车流测试场景示意图
(3)试验退出条件
a)车辆成功变道并驶入匝道,则单次试验结束。
b)车辆发生碰撞或未成功变道,则该项目测试终止。
2.5.3.2. 匝道汇入主路
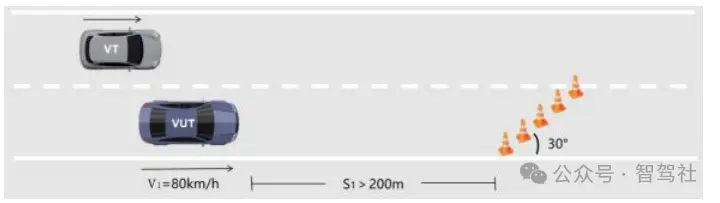
2.5.3.2. 1. 白天-左侧邻车道后方有非连续行驶车流(仿真场景)
(1)测试场景
测试道路为至少包含两条车道的长直道,中间车道线为虚线,试验车辆从匝道驶入主路。
(2)测试方法
试验车辆在领航行车辅助系统激活条件下,从匝道驶入主路,设置初始车速 120km/h ,当本车到达缓冲路段时试验开始,主路最右侧车道设置 10 辆车速为 70km/h 的非连续车流,车流车辆间距为 100m 。如图 2-22 所示。
图 2-22 白天-左侧邻车道有快速行驶车流测试场景示意图
(3)试验退出条件
a)试验车辆成功换道并进入主路,则单次试验结束。
b)试验车辆未成功变道或发生碰撞,则该项目测试终止。
附件1 仿真测试流程合规性报告模板
附件2 仿真测试结果通过性报告模板



编辑推荐




最新资讯
-
R171.01对DCAS的要求⑤
2025-04-20 10:58
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
