




 广告
广告





















































中国智能网联汽车技术规程(C-ICAP-2024版)之基础行车辅助测评规则

C-ICAP(2024 版)对辅助驾驶测评单元(行车辅助项目、泊车辅助项目)、智慧座舱测评单元、隐私保护测评单元开展测试评价,并在2024年7月1号开始实施。
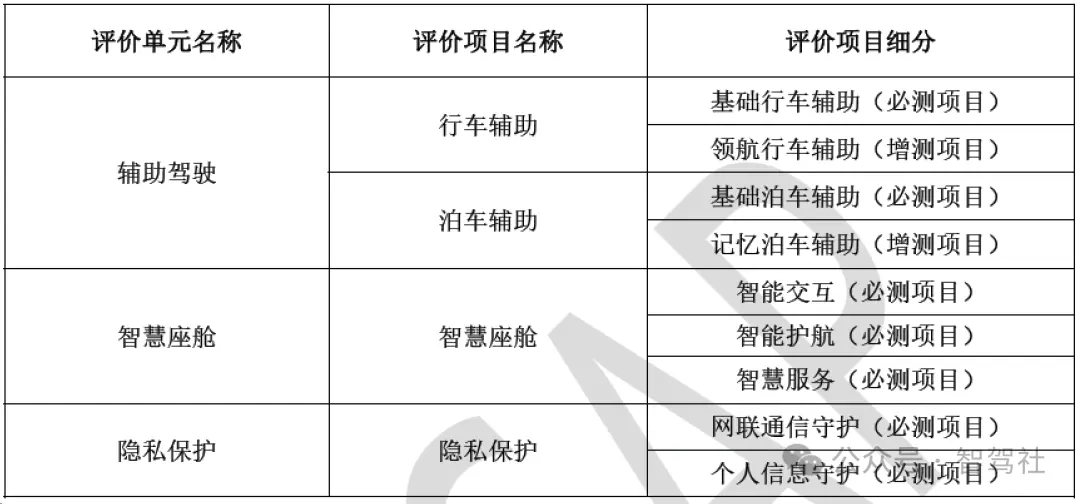
1 行车辅助评价项目
行车辅助项目包括基础行车辅助和领航行车辅助。其中,基础行车辅助部分为必测项,包括跟车能力、组合控制能力、紧急避险能力和驾驶员交互 4 方面的内容;领航行车辅助部分为增测项,包括主动换道能力、连续运行能力 2 方面内容。
2 泊车辅助评价项目
泊车辅助项目包括基础泊车辅助和记忆泊车辅助。其中,基础泊车辅助部分为必测项,包括泊入能力、泊出能力、驾驶员交互、遥控泊车 4方面的内容;记忆泊车辅助部分为增测项,包括一键召唤能力、一键泊车能力 2 方面内容。
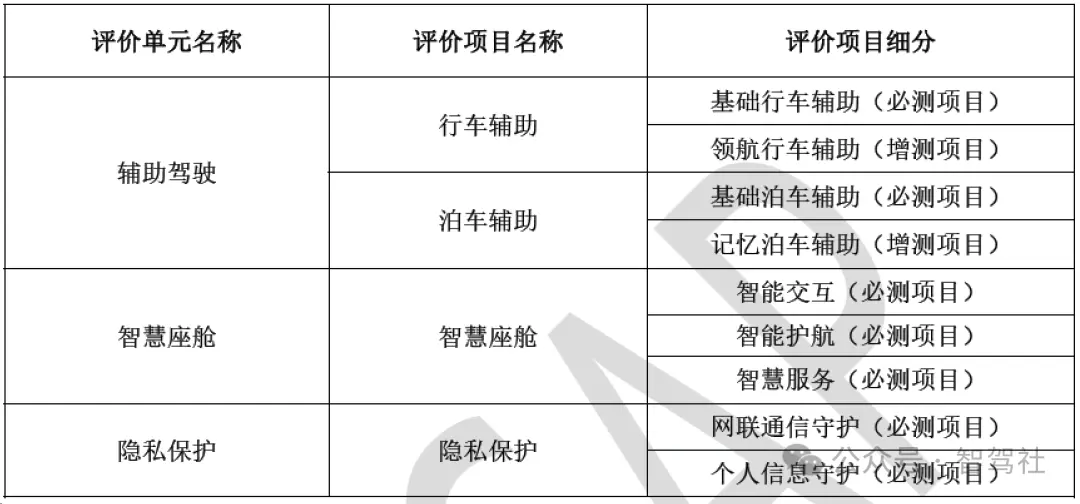
3 智慧座舱评价项目
智慧座舱项目包括智能交互、智能护航、智慧服务 3 个一级指标,均为必测项目。其中,智能交互包括触控交互、语音交互、无线交互;智能护航包括视野智能拓展、视野防干扰;智慧服务包括迎宾场景、驾乘场景、送客场景。
4 隐私保护评价项目
隐私保护项目包括网联通信守护、个人信息守护 2 个一级指标,均为必测项目。其中,网联通信守护包括基础安全守护、攻击防御守护;个人信息守护包括车端敏感个人信息、车端一般个人信息、手机端个人信息。
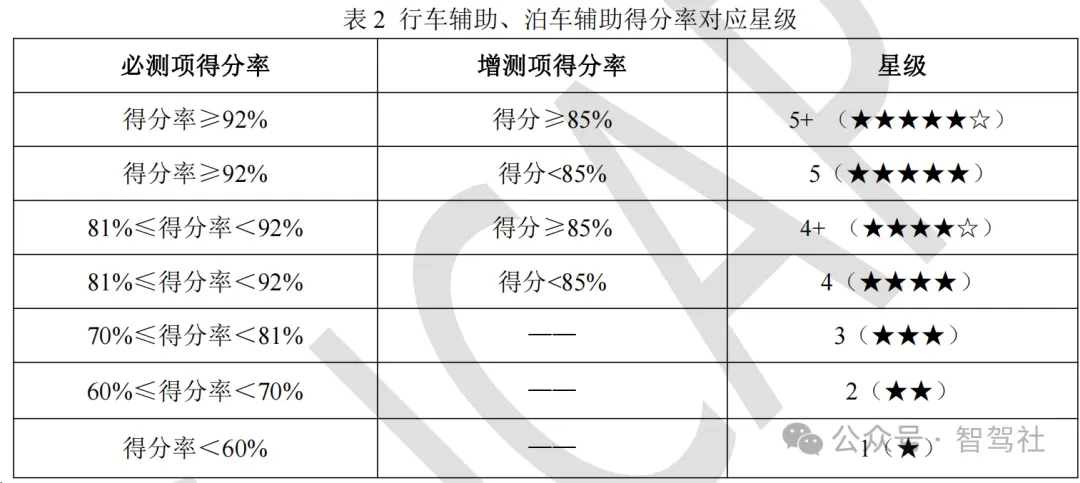
C-ICAP 计算各个评价项目的综合得分率并进行星级评价。各个项目的综合得分率由下设指标加权得出。
《C-ICAP(2024 版)》对行车辅助、泊车辅助、智慧座舱、隐私保护 4 个项目进行星级评价。其中,行车辅助、泊车辅助最终根据必测项、增测项 2 个部分的得分率对试验车辆进行星级评价,如表 2 所示。当必测项得分率≥81%,且增测项得分率≥85%时,星级可增加“☆”。
本文件测试对象包括自适应巡航系统、组合驾驶辅助系统等驾驶辅助系统。基础行车辅助下设指标如表所示。
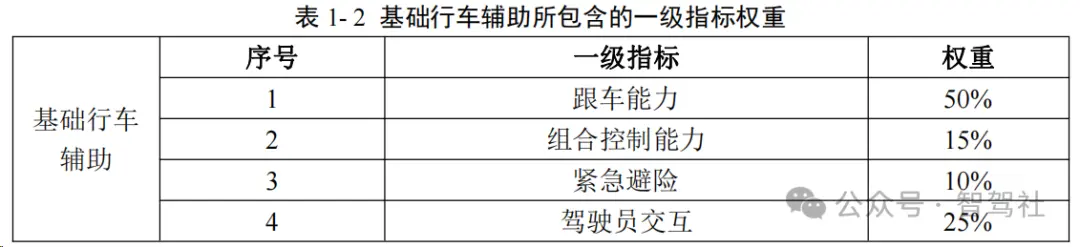
基础行车辅助下设 4 个一级指标:跟车能力、组合控制能力、紧急避险和驾驶员交互,各个一级指标权重如表 1-2 所示
跟车能力权重分配
跟车能力下设 6 个二级指标:前车静止识别与响应、前车低速识别与响应、前车减速识别与响应、前车切入识别与响应、前车切出识别与响应和跟随前车启停。各个二级指标权重如表 1-3 所示。
组合控制能力权重分配
组合控制能力下设 2 个二级指标:弯道通行和拨杆换道,各个二级指标权重如表 1-4 所示。
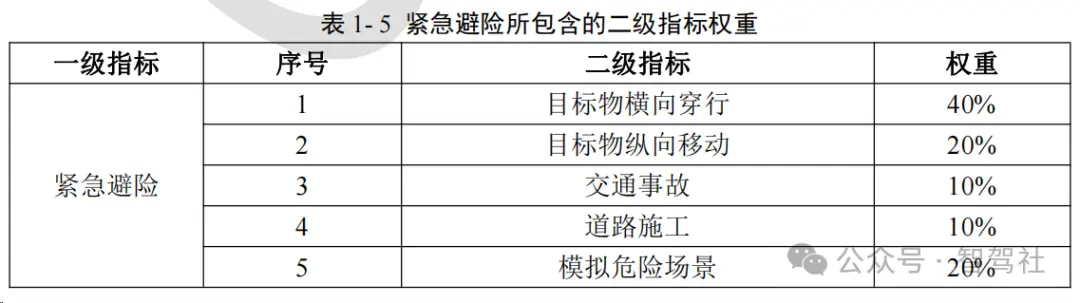
紧急避险权重分配
紧急避险下设 5 个二级指标:目标物横向穿行、目标物纵向移动、交通事故、道路施工和模拟危险场景,各个二级指标权重如表 1-5 所示。
驾驶员交互权重分配
驾驶员交互下设 4 个二级指标:系统状态、驾驶员监测、人机共驾和误响应,各个二级指标权重如表 1-6 所示。
跟车能力各个三级指标所占权重如表 1-7 所示


组合控制能力各个三级指标所占权重如表 1-8 所示。
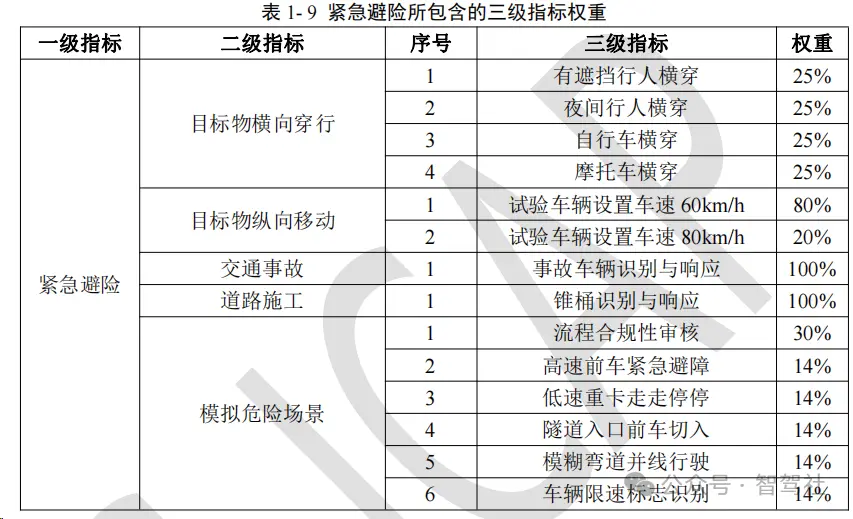
紧急避险各个三级指标所占权重如表 1-9 所示。
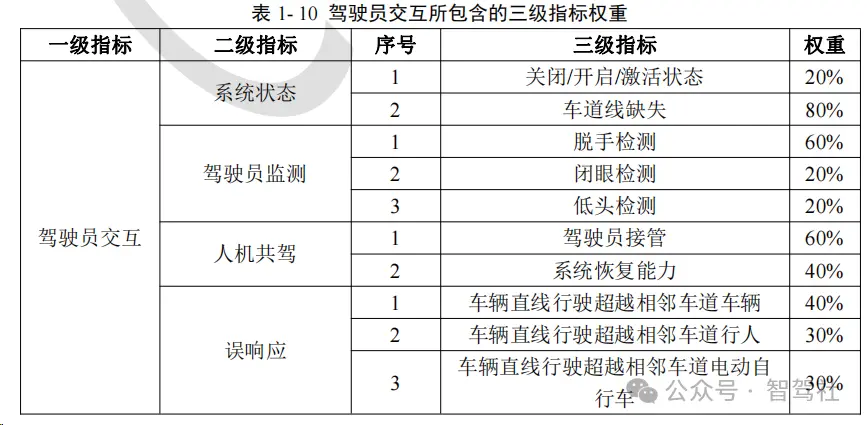
驾驶员交互各个三级指标所占权重如表 1-10 所示。
前车静止识别与响应、前车减速识别与响应、前车切出识别与响应得分说明
1)试验车辆与目标车辆的速度差在 100km/h 以下时,试验车辆未与目标物发生碰撞或绕行,制动过程纵向减速度不超过 5m/s2,纵向减速度变化率不超过 5m/s3,得 100 分;试验车辆与目标车辆的速度差在 100km/h 以上(含 100km/h)时,试验车辆未与目标物发生碰撞或绕行,得 100 分;
2)试验车辆与目标车辆的速度差在 100km/h 以下时,试验车辆未与目标物发生碰撞或绕行,制动过程纵向减速度超过 5m/s2或纵向减速度变化率超过 5m/s3,得 70 分;
3)试验车辆与目标物发生碰撞,得 0 分。
前车低速识别与响应、前车切入识别与响应得分说明
1)试验车辆与目标车辆的速度差在 100km/h 以下时,试验车辆未与目标物发生碰撞,能稳定跟随目标物行驶或绕行,制动过程纵向减速度不超过 5m/s2,纵向减速度变化率不超过 5m/s3,得 100 分;试验车辆与目标车辆的速度差在 100km/h 以上(含 100km/h)时,试验车辆未与目标物发生碰撞或绕行,得 100 分;
2)试验车辆与目标车辆的速度差在 100km/h 以下时,试验车辆未与目标物发生碰撞,能稳定跟随目标物行驶或绕行,制动过程纵向减速度超过 5m/s2 或纵向减速度变化率超过5m/s3,得 70 分;
3)试验车辆与目标物发生碰撞,得 0 分。
跟随前车启停得分说明
无行人横穿:试验车辆未与目标车辆发生碰撞,当目标车辆重新起步后,试验车辆能起步(自动或驾驶员确认)并稳定跟车,制动过程中纵向减速度不超过 5m/s2,纵向减速度变化率不超过 5m/s3,得 100 分;否则,得 0 分。
行人横穿:试验车辆未与目标车辆发生碰撞,当目标车辆重新起步后,试验车辆未与行人目标物发生碰撞,行人目标物穿过后,试验车辆能够自动起步并稳定跟车,制动过程中纵向减速度不超过 5m/s2,纵向减速度变化率不超过 5m/s3,得 100 分;否则,得 0 分。
组合控制能力得分说明
无其他交通参与者得分说明
试验车辆前轮外沿不得接触车道线内沿,制动过程纵向减速度不超过 5m/s2,纵向减速度变化率不超过 5m/s3,过弯过程横向加速度不超过 3m/s2,横向加速度变化率不超过 5m/s3,得 100 分;否则,得 0 分。
有其他交通参与者得分说明
1)试验车辆的前轮外沿不得接触车道线内沿,未与目标物发生碰撞,制动过程纵向减速度不超过 5m/s2,纵向减速度变化率不超过 5m/s3,过弯过程横向加速度不超过 3m/s2,横向加速度变化率不超过 5m/s3,得 100 分;
2)试验车辆的前轮外沿不得接触车道线内沿,未与目标物发生碰撞,制动过程纵向减速度超过5m/s2或纵向减速度变化率超过5m/s3或过弯过程横向加速度超过3m/s2或横向加速度变化率超过 5m/s3,得 70 分;
3)试验车辆的前轮外沿接触车道线内沿或与目标物发生碰撞,得 0 分。
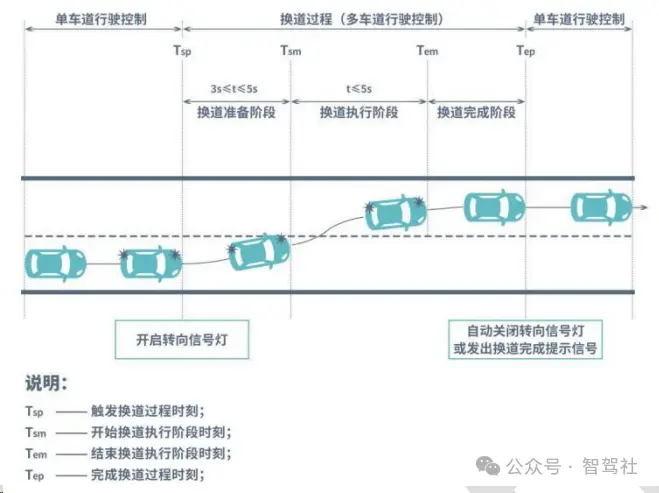
无干扰车换道得分说明
系统在换道过程触发后 3s 至 5s 内完成换道准备阶段,并在之后的 5s 内完成换道执行阶段,得 100 分;否则,得 0 分。
有干扰车换道得分说明
在进行有干扰车换道测试时,不进行换道,得 100 分;否则,得 0 分。
行人安全响应得分说明
1)不进行换道,得 100 分;
2)进行换道且避免碰撞,得 70 分;
3)发生碰撞,得 0 分。
紧急避险得分说明
有遮挡行人横穿、夜间行人横穿、自行车横穿、摩托车横穿、目标物纵向移动、交通事故、道路施工、模拟危险场景得分说明
试验车辆可以避免碰撞,该测试速度点得满分;若没有避免碰撞,使用线性插值的方法来计算该测试速度点得分。
测试流程审核报告应包括所采用的核心软硬件、车辆动力学标定结果对比、被测设备、信号流示意图等四大部分,各部分满分 25 分,根据内容完整性、合理性、真实性综合评价。全部提供且符合要求则该测试项得 100 分。
高速前车紧急避障得分说明
1)试验车辆未与障碍物发生碰撞,且制动过程最大减速度不超过 5m/s2,得 100 分;
2)试验车辆未与障碍物发生碰撞,但制动过程最大减速度超过 5m/s2,得 70 分;
3)试验车辆与障碍物发生碰撞,不得分。
低速重卡走走停停得分说明
1)试验车辆未与目标车辆发生碰撞,当目标车辆重新起步后,试验车辆能自动起步并恢复设置车速或稳定跟车,制动过程中减速度小于 5m/s2,得 100 分;
2)试验车辆未与目标车辆发生碰撞,当目标车辆重新起步后,试验车辆能自动起步并恢复设置车速或稳定跟车,制动过程中减速度超过 5m/s2,得 70 分;
3)试验车辆与目标车辆发生碰撞,不得分。
隧道入口前车切入得分说明
1)试验车辆未与目标车辆发生碰撞,且制动过程最大减速度不超过 5m/s2,得 100 分;2)试验车辆未与目标车辆发生碰撞,但制动过程最大减速度超过 5m/s2,得 70 分;
3)试验车辆与目标车辆发生碰撞,不得分。
模糊弯道并线行驶得分说明
1)试验车辆未与目标车辆发生碰撞,且前轮外沿未超过车道线外沿 0.2m,得 100 分;2)试验车辆未与目标车辆发生碰撞,但前轮外沿超过车道线外沿 0.2m,得 70 分;
3)试验车辆与目标车辆发生碰撞,不得分。
车辆限速标志识别得分说明
1)试验车辆能够准确获取前方限速信息(具体实现方式不做限定,例如摄像头感知、车载地图、移动设备交互等)并发出警示,且在限速牌前将车速稳定在 50~70km/h 的区间范围内,得 100 分;
2)试验车辆能够准确识别前方限速信息(具体实现方式不做限定,例如摄像头感知、车载地图、移动设备交互等)并发出警示,但未能在限速牌前将车速稳定在 50~70km/h 的区间范围内,得 70 分;
3)试验车辆未能准确识别前方限速信息(具体实现方式不做限定,例如摄像头感知、车载地图、移动设备交互等),不得分。
驾驶员交互得分说明
系统关闭/开启/激活状态得分说明
在车辆启动后,能明确表明该系统的关闭状态、开启状态以及激活状态,得 100 分;否则,得 0 分。
车道线缺失得分说明
试验车辆经过相应车道线部分缺失路段时,功能可以保持激活,得 25 分;否则,得 0分。共 4 个场景,满分 100 分。
驾驶员监测得分说明
脱手检测得分说明
1)从驾驶员双手离开方向盘至发出视觉报警,时间间隔不得超过 15s;驾驶员双手离开方向盘至发出声音报警,时间间隔不得超过 30s,声音报警需持续到功能退出。该功能最晚在声觉报警发出 30s 内关闭或进入最小风险策略(MRM),关闭或进入 MRM 时,伴随至少 5s 的急促声觉报警,得 60 分;否则,得 0 分;
2)手扶方向盘且不施加握力时,若不发出报警,得 20 分;否则,得 0 分;
3)在进行该项测试时,如果系统进入 MRM,得 20 分;否则,得 0 分。
闭眼检测得分说明
1)当驾驶员闭眼后,应在 4s 内发出语音报警或者声觉报警(需伴随视觉或触觉信号),得 80 分;否则,得 0 分;
2)该功能最晚在报警发出 30s 内进入 MRM,进入 MRM 时,伴随至少 5s 的急促声觉报警,得 20 分;否则,得 0 分。
低头检测得分说明
1)当驾驶员低头后,应在 5s 内发出语音报警或者声觉报警(需伴随视觉或触觉信号),得 80 分;否则,得 0 分。
2)该功能最晚在报警发出 30s 内进入 MRM,进入 MRM 时,伴随至少 5s 的急促声觉报警,得 20 分;否则,得 0 分。
人机共驾得分说明
驾驶员接管得分说明
驾驶员接管车辆的转向力矩大于 2N•m 且不超过 5N•m,得 100 分;否则,得 0 分。
系统恢复能力得分说明
1)试验车辆后轴中心与相邻车道中心重合时开始,系统在 5s 内自动激活,得 100 分;
2)试验车辆后轴中心与相邻车道中心重合时开始,系统在 5s 外自动激活,得 70 分;
3)试验车辆后轴中心与相邻车道中心重合时开始,系统不能自动激活,得 0 分。
误响应得分说明
车辆直线行驶超越相邻车道车辆、车辆直线行驶超越相邻车道行人、车辆直线行驶超越相邻车道电动自行车得分说明
试验车辆通过目标物且减速度不超过 5m/s2,得 100 分;否则,得 0 分。
前车静止识别与响应
(1)测试场景
测试道路为至少包含一条车道的长直道,试验车辆驶向前方静止目标车辆,如图 2-9 所示。
(2)测试方法
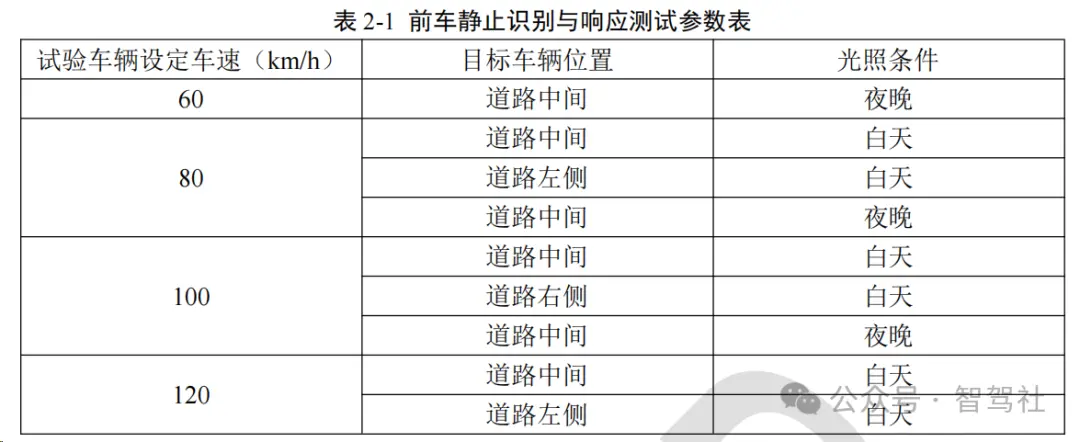
系统激活后,按照表 2-1 的设定速度进行试验。试验车辆在距离目标物 200m 前达到预期车速,并以稳定状态驶向前方静止目标车辆,驾驶员双手握住方向盘,不得干扰系统的正常驾驶。试验车辆设定车速、目标车辆摆放位置及光照条件如表 2-1 所示。
目标车辆在道路左侧指:目标车辆中心线与左侧车道线中心线重合。
目标车辆在道路右侧指:目标车辆中心线与右侧车道线中心线重合。
夜晚测试条件:无路灯,光照强度小于 1lux,车灯状态为远光灯。
(3)试验退出条件
当满足下列条件时,试验退出:
1)单次试验,试验车辆车速为零或发生碰撞,则该单次测试结束;当试验车辆与目标车辆的速度差在 60km/h、80km/h、100km/h、120km/h,试验车辆与目标车辆距离分别为 13m、24m、38m、55m 时,试验车辆无减速则该单次测试结束。
2)发生碰撞时,试验车辆车速降低量小于 5km/h 或试验车辆速度大于 50km/h,则该测试项目测试结果为碰撞。
3)某测试项目测试结果为碰撞,则不再进行后续测试项目。
前车低速识别与响应
(1)测试场景
测试道路为至少包含一条车道的长直道,试验车辆驶向前方慢行目标。如图 2-10 所示。

(2)测试方法
系统激活后,按照表 2-2 的设定速度进行试验。试验车辆在距离目标物 200m 前达到预期车速,并以稳定状态驶向前方低速目标物,驾驶员双手握住方向盘,不得干扰系统的正常驾驶。试验车辆设定车速及目标物摆放位置如表 2-2 所示。
目标物在道路左侧指:目标物中心线与左侧车道线中心线重合。
目标物在道路右侧指:目标物中心线与右侧车道线中心线重合。

(3)试验退出条件
当满足下列条件时,试验退出:
1) 单次试验,试验车辆车速小于目标车辆车速或发生碰撞,则该单次测试结束;当试验车辆与目标车辆的速度差在 60km/h、100km/h,试验车辆与目标车辆距离分别为 13m、38m 时,试验车辆无减速则该单次测试结束。
2) 发生碰撞时,试验车辆车速降低量小于 5km/h 或试验车辆速度大于 50km/h,则该测试项目测试结果为碰撞。
3) 某测试项目测试结果为碰撞,则不再进行后续测试项目
前车减速识别与响应
(1)测试场景
测试道路为至少包含一条车道的长直道,试验车辆驶向前方正在减速的目标车辆。如图 2-11 所示。

(2)测试方法
系统激活后,按照表 2-3 的设定速度进行试验。试验车辆以相对稳定的跟车距离跟随目标车辆行驶,然后前车施加 3m/s2的减速度。过程中驾驶员双手握住方向盘,不得干扰系统的正常驾驶。试验车辆设定车速及目标车摆放位置如表所示。
(3)试验退出条件
当满足下列条件时,试验退出:
1) 单次试验,试验车辆车速小于目标车辆车速或发生碰撞,则该单次测试结束。
2) 发生碰撞时,试验车辆车速降低量小于 5km/h 或试验车辆速度大于 50km/h,则该测试项目测试结果为碰撞。
3) 某测试项目测试结果为碰撞,则不再进行后续测试项目。
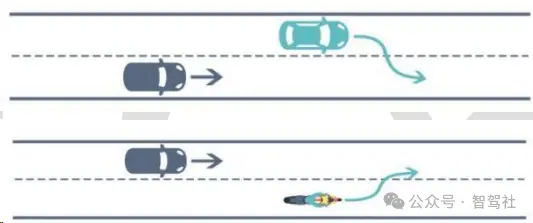
前车切入识别与响应
(1)测试场景
测试道路为至少包含两条车道的长直道,中间车道线为白色虚线,车道宽度 3.75m。试验车辆和目标车辆在各自车道内行驶,在试验车辆接近目标车辆过程中,目标车辆切入试验车辆所在车道。如图 所示。
(2)测试方法
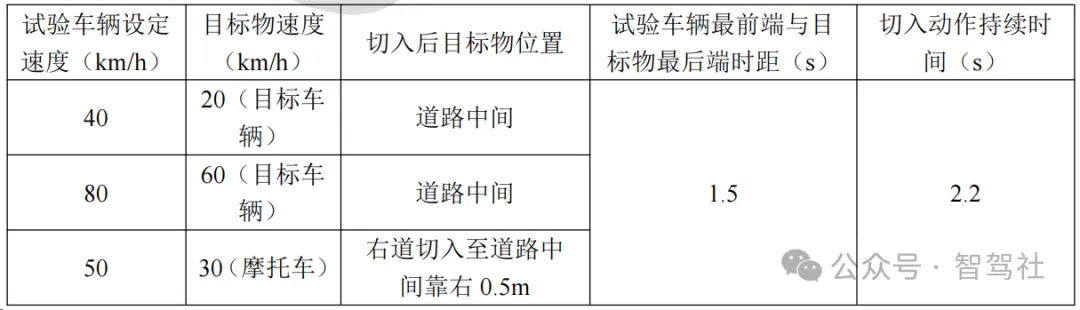
系统激活后,按照表 2-4 的设定速度进行试验。试验车辆在距离目标物 200m 前达到预期车速,并在车道内稳定行驶,目标车辆以某一速度在相邻车道中间匀速同向行驶并快速切入试验车辆所在车道,并沿车道中间行驶。过程中驾驶员双手握住方向盘,不得干扰系统的正常驾驶。试验车辆设定速度、目标物速度、切入后目标物位置、试验车辆最前端与目标物最后端时距、切入动作持续时间如表所示,其中切入动作持续时间指车辆开始横向移动至车辆后轴中心与目标车道中心线重合的位置所需要的时间。
(3)试验退出条件
当满足下列条件时,试验退出:
1) 单次试验,试验车辆车速小于目标车辆车速或发生碰撞,则该单次测试结束。
2) 发生碰撞时,试验车辆车速降低量小于 5km/h 或试验车辆速度大于 50km/h,则该测试项目测试结果为碰撞。
前车切出识别与响应
(1)测试场景
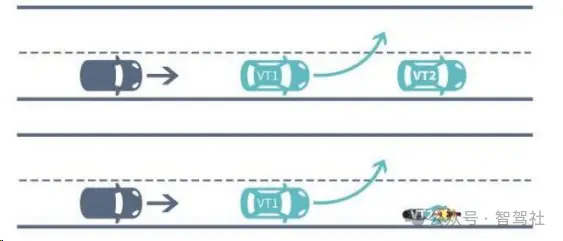
测试道路为至少包含两条车道的长直道,中间车道线为白色虚线,车道宽 3.75m,试验车辆在任一车道行驶,试验车辆的前方存在目标车辆。如图所示。
(2)测试方法
系统激活后,按照表 2-5 的设定速度进行试验。目标车辆 VT1 沿车道中间行驶,试验车辆以相对稳定的跟车距离跟随前方目标车辆 VT1 稳定行驶,目标车辆 VT1 在接近目标物VT2 过程中切出本车道,并沿相邻车道中间行驶。试验过程中驾驶员双手握住方向盘,不得干扰系统的正常驾驶。试验车辆设定速度、目标物速度、目标车辆 VT1 切出时与目标物VT2 的距离、目标车辆 VT1 切入过程持续时间如表所示,其中切入动作持续时间指车辆开始横向移动至车辆后轴中心与目标车道中心线重合的位置所需要的时间。

(3)试验退出条件
当满足下列条件时,试验退出:
1) 单次试验,试验车辆车速为零或发生碰撞,则该单次测试结束;当试验车辆与目标车辆的速度差在 60km/h、70km/h、90km/h,试验车辆与目标车辆距离分别为 13m、18m、31m 时,试验车辆无减速则该单次测试结束。
2) 发生碰撞时,试验车辆车速降低量小于 5km/h 或试验车辆速度大于 50km/h,则该测试项目测试结果为碰撞。
跟随前车启停
无行人横穿
(1)测试场景
测试道路为至少包含一条车道的长直道,试验车辆于同车道内稳定跟随目标车辆,目标车辆制动直至停止,一定时间后目标车辆起步加速。如图所示。
(2)测试方法
系统激活后,试验车辆跟随前方目标车辆行驶,目标车辆在车道中间以 20km/h 的速度匀速行驶,试验车辆以相对稳定的跟车距离跟随目标车辆行驶至少 3s 后,目标车辆以 2m/s2的减速度减速直至停止。试验车辆停止不超过 3s,目标车辆起步加速恢复至初始速度,加速度 2m/s2。过程中驾驶员双手握住方向盘,不得干扰系统的正常驾驶。
(3)试验退出条件
当满足下列条件时,试验退出:单次试验,试验车辆与目标车辆发生碰撞或试验车辆稳定行驶,则该单次测试结束。
行人横穿
(1)测试场景
测试道路为至少包含一条车道的长直道,试验车辆于同车道内稳定跟随目标车辆,目标车辆制动直至停止,行人横穿至试验车辆中心线时,目标车辆起步加速,如图 所示。
(2)测试方法
系统激活后,试验车辆跟随前方目标车辆行驶,目标车辆在车道中间以 20km/h 的速度匀速行驶,试验车辆以相对稳定的跟车距离跟随目标车辆行驶至少 3s 后,目标车辆以 2m/s2的减速度减速直至停止。目标车辆停止后,行人以 5km/h 的速度横穿至试验车辆中心线处。
行人到达位置后,目标车辆起步加速恢复至初始速度,加速度 2m/s2。目标车辆起步 5s 后,行人继续以 5km/h 的速度横穿通过本车道。过程中驾驶员双手握住方向盘,不得干扰系统的正常驾驶。
(3)试验退出条件
当满足下列条件时,试验退出:
1) 单次试验,试验车辆与目标车辆或行人发生碰撞,则该单次测试结束。
2) 单次试验,试验车辆稳定行驶,则该单次测试结束
组合控制能力
弯道通行
无其他交通参与者
(1)测试场景
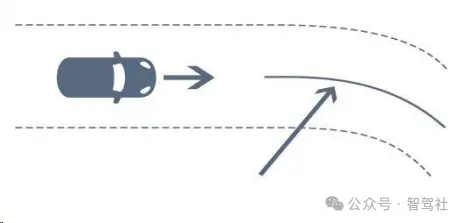
测试道路为一条长直道和弯道的组合,连接处平滑过渡,弯道长度应满足车辆行驶时间大于 5s,两侧车道线应为白色虚线或实线,无其他交通参与者。试验车辆由长直道驶向弯道,如图所示。
(2)测试方法
依次对设定车速 90km/h、120km/h 进行试验,不同设定车速对应转弯半径如表所示,系统激活后,驾驶员双手握住方向盘。车辆在进入弯道前达到稳定行驶状态。

(3)试验退出条件
当满足下列条件时,试验退出:试验车辆前轮外沿接触车道线内沿或车辆在车道内稳定行驶。
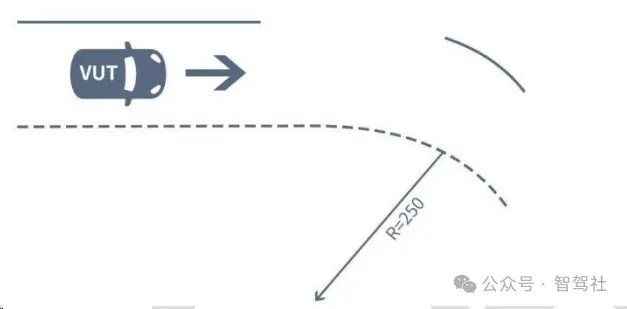
有其他交通参与者
(1)测试场景
测试道路为一条长直道和弯道的组合,连接处平滑过渡。直道部分长度不小于 150m,弯道长度不小于 200m,弯道转弯半径为 500m,在弯道尽头存在静止目标车辆。如图所示。
(2)测试方法
系统激活后,根据表设定车速,试验车辆以稳定状态驶向前方静止目标车辆,驾驶员双手握住方向盘,不得干扰系统的正常驾驶。

(3)试验退出条件
当满足下列条件时,试验退出:
1)单次试验,试验车辆车速为零或发生碰撞,则该单次测试结束;当试验车辆与目标车辆的速度差在 60km/h、80km/h、100km/h,试验车辆与目标车辆距离分别为13m、24m、38m 时,试验车辆无减速则该单次测试结束。
2)发生碰撞时,试验车辆车速降低量小于 5km/h 或试验车辆速度大于 50km/h,则该测试项目测试结果为碰撞。
3) 某测试项目测试结果为碰撞,则不再进行后续测试项目。
拨杆换道
无干扰车换道
(1)测试场景
测试道路为至少包含两条车道的长直道。测试车辆匀速行驶,且相邻车道无干扰车辆。如图所示。
(2)测试方法
试验车辆设置车速为激活换道功能的最低车速,待车辆稳定行驶后,触发换道动作。
(3)试验退出条件
当满足下列条件时,试验退出:
单次试验,试验车辆完成换道动作或车辆在本车道内行驶超过 5s,则该单次测试结束。
有干扰车换道
(1)测试场景
测试道路为至少包含两条车道的长直道。试验车辆匀速行驶,在相邻车道内存在目标车辆,并以一定速度超车行驶。如图所示。
(2)测试方法
试验车辆设置车速为 50km/h,目标车辆在相邻车道内以 70km/h 的车速行驶,当试验车辆和目标车辆的纵向距离为 16-18m 时,拨动转向杆,触发换道动作。
(3)试验退出条件
当满足下列条件时,试验退出:
单次试验,试验车辆触发换道动作或目标车辆车头越过测试车辆车尾,则该单次测试结束。
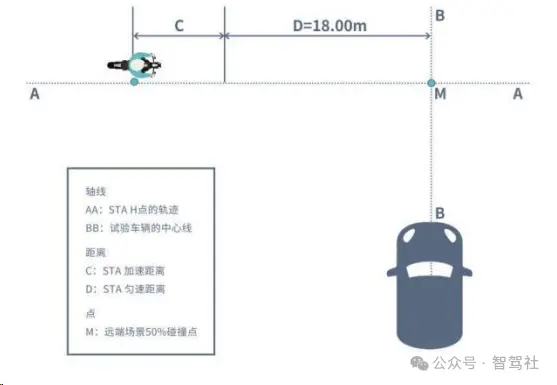
行人安全响应
(1)测试场景
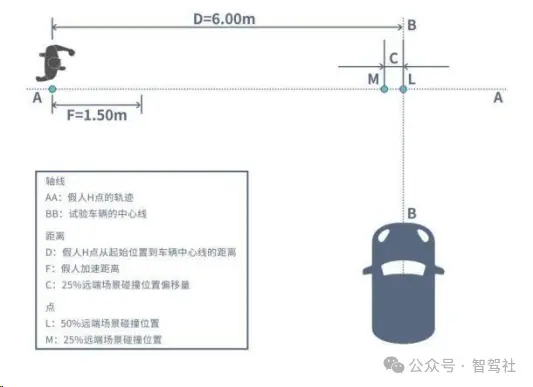
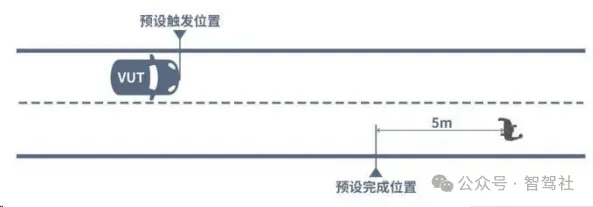
测试道路为至少包含两条车道的长直道。试验车辆匀速行驶,换道时在相邻车道内存在静止行人。如图 2-20 所示。
(2)测试方法
1)试验车辆设置车速为 60km/h,试验车辆在预设触发位置向相邻车道触发三次换道过程,记录三次换道过程完成位置,取三次换道完成位置距离“预设触发位置”的平均值作为“预设完成位置”。在预设完成位置后 5 m 摆放静止于车道中央的目标行人。
2)完成场景布置后,试验车辆设置车速为 60km/h,待车辆行驶到预设触发位置时,试验车辆向相邻车道触发换道动作。
(3)试验退出条件
当满足下列条件时,试验退出:
1) 单次试验,试验车辆与行人发生碰撞或避免碰撞,则该单次测试结束。
2) 发生碰撞时,试验车辆车速降低量小于 5km/h,则该测试项目测试结果为碰撞。
紧急避险
有遮挡行人横穿
(1)测试场景
测试道路为至少包含一条车道的长直道,场景布置如图所示。
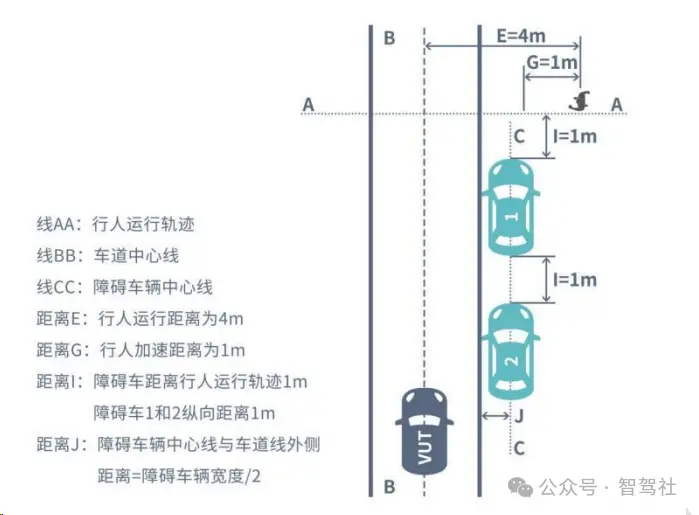
(2)测试方法
系统激活后,试验车辆设置车速为 40km/h,在距离行人行驶轨迹 100m 前达到预期车速,并匀速向前行驶。成年行人以 5km/h 的速度匀速行驶,预计碰撞点在道路正中间。
(3)试验退出条件
当满足下列条件时,试验退出:
1) 单次试验,试验车辆与行人发生碰撞或避免碰撞,则该单次测试结束。
2) 发生碰撞时,试验车辆车速降低量小于 5km/h,则该测试项目测试结束。
(4)障碍车尺寸
障碍车长度在 4100mm 至 4700mm 范围内,宽度在 1700mm 至 1900mm 范围内,高度在 1300mm 至 1800mm 范围内。
夜间行人横穿
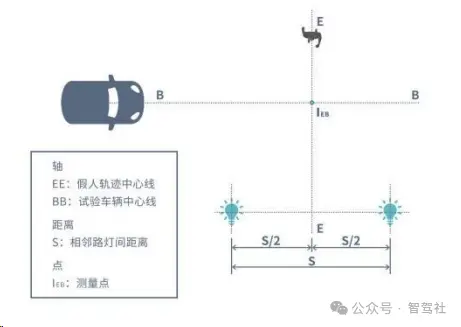
选取车辆行驶轨迹与行人移动轨迹的交叉点测量背景光照强度,且在测量背景光照强度时,所有的灯具(包括车灯)应关闭,如图所示。背景光照强度应满足:IEB < 1lux。
试验车辆路径的光照强度
试验车辆路径的平均光照强度指在试验车辆路径上的测量点的平均光照强度,即试验车辆所在道路中心的平均光照强度,如图 2-23 所示。试验车辆路径平均光照强度应在以下范围内:
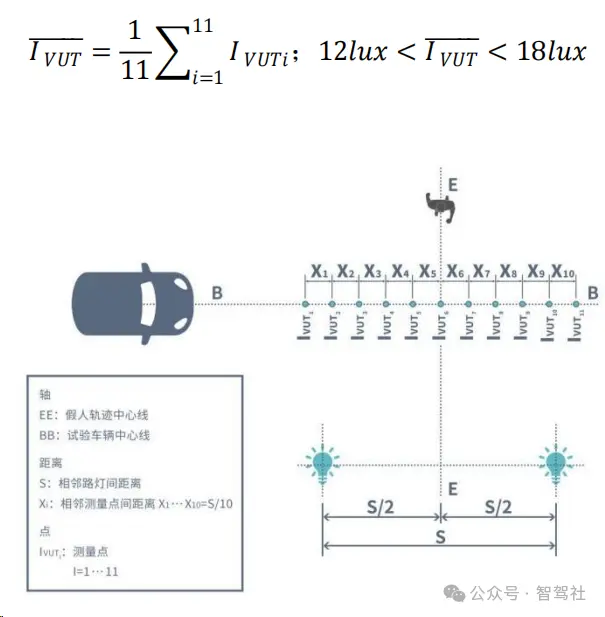
行人路径的光照强度
沿着行人路径(即图 中 E-E 轴)的测量点的最低光照强度应满足 I PTAi>5lux。
测试路灯设置
行人夜间试验中路灯设置如图所示,行人路径共设六盏路灯,行人穿行路径设置在第三盏、第四盏中间。
测试场景
(1)测试场景
测试道路为至少包含两条车道的长直道,场景布置如图所示。
(2)测试方法
系统激活后,试验车辆设置车速为 40km/h,打开近光灯,在距离行人行驶轨迹 100m前达到预期车速,并匀速向前行驶。行人以 6.5km/h 的速度匀速行驶,预计碰撞点在道路正中间。
(3)试验退出条件
当满足下列条件时,试验退出:
1) 单次试验,试验车辆与行人发生碰撞或避免碰撞,则该单次测试结束。
2) 发生碰撞时,试验车辆车速降低量小于 5km/h,则该测试项目测试结束。
自行车横穿
(1)测试场景
测试道路为至少包含一条车道的长直道,场景布置如图所示。
(2)测试方法
系统激活后,试验车辆设置车速为 40km/h,在距离二轮车行驶轨迹 100m 前达到预期车速,并匀速向前行驶。二轮车以 15km/h 的速度匀速行驶,预计碰撞点在道路正中间。
(3)试验退出条件
当满足下列条件时,试验退出:
1) 单次试验,试验车辆与二轮车发生碰撞或避免碰撞,则该单次测试结束。
2) 发生碰撞时,试验车辆车速降低量小于 5km/h,则该测试项目测试结束。
摩托车横穿
(1)测试场景
测试道路为至少包含一条车道的长直道,场景布置如图所示
(2)测试方法
系统激活后,试验车辆设置车速为 40km/h,在距离电动二轮车行驶轨迹 100m 前达到预期车速,并匀速向前行驶。电动二轮车以 20km/h 的速度匀速行驶,预计碰撞点在道路正中间。
(3)试验退出条件
当满足下列条件时,试验退出:
1) 单次试验,试验车辆与电动二轮车发生碰撞或避免碰撞,则该单次测试结束。
2) 发生碰撞时,试验车辆车速降低量小于 5km/h,则该测试项目测试结束
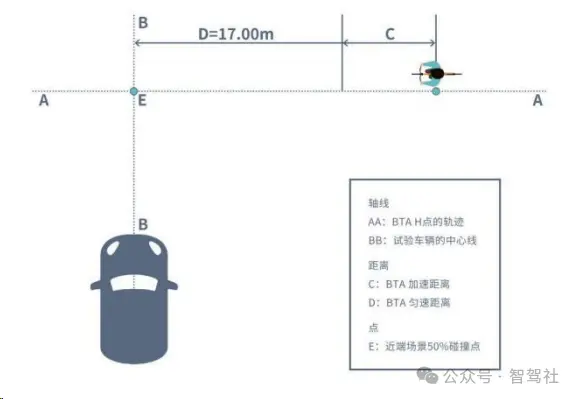
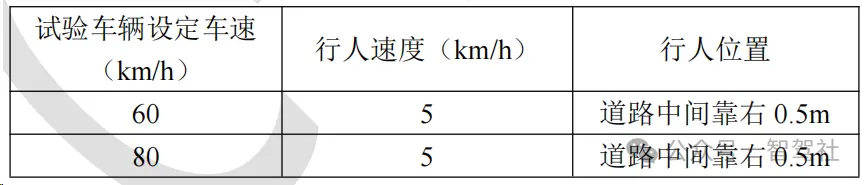
目标物纵向移动
(1)测试场景
测试道路为至少包含一条车道的长直道,试验车辆驶向前方慢行行人。如图所示。

(2)测试方法
系统激活后,设定车速由低到高依次进行试验。试验车辆在距离目标物 200m 前达到预期车速,并以稳定状态驶向前方慢行行人,驾驶员双手握住方向盘,不得干扰系统的正常驾驶。试验车辆设定车速及行人位置如表所示。
(3)试验退出条件
当满足下列条件时,试验退出:
1)单次试验,试验车辆与行人发生碰撞或避免碰撞,则该单次测试结束。
2)发生碰撞时,试验车辆车速降低量小于 5km/h 或试验车辆速度大于 50km/h,则该测试项目测试结果为碰撞。
3)某测试项目测试结果为碰撞,则不再进行后续测试项目
事故车辆识别与响应
(1)测试场景
测试道路为至少包含两条车道的长直道,在车道中间横置静止的目标车辆作为障碍物,试验车辆匀速驶向前方障碍物。如图所示。
(2)测试方法
系统激活后,试验车辆设置车速分为 60km/h,在距离目标物 200m 前达到预期车速,并匀速驶向障碍物。
(3)试验退出条件
当满足下列条件时,试验退出:
1) 单次试验,试验车辆与车辆发生碰撞或避免碰撞,则该单次测试结束。
2) 发生碰撞时,试验车辆车速降低量小于 5km/h 或试验车辆速度大于 50km/h,则该测试项目测试结束。
道路施工
锥桶识别与响应
(1)测试场景
测试道路为至少包含两条车道的长直道,在车道中间放置倾斜于道路方向 45°夹角的 5个锥形交通路标(推荐尺寸:50cm×35cm)作为障碍物,试验车辆匀速驶向前方障碍物。如图所示。
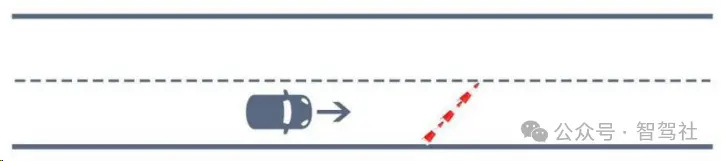
(2)测试方法
系统激活后,试验车辆设置车速为 60km/h,在距离目标物 200m 前达到预期车速,并匀速驶向障碍物。
(3)试验退出条件
当满足下列条件时,试验退出:
1) 单次试验,试验车辆与障碍物发生碰撞或避免碰撞,则该单次测试结束。
2) 发生碰撞时,试验车辆车速降低量小于 5km/h,则该测试项目测试结束。
模拟危险场景
仿真测试实施机构及测试方法
仿真测试实施由企业自主完成或委托第三方检测认证机构开展,具体实施形式由企业结合自身情况合理选择。为保证结果的公平、公正,无论企业选择何种方式,均需由试验人员对实施测试的环境进行现场或远程审核。作为评分前提,若发现提交的报告与实际测试环境不符,则取消此次车型的仿真评分资格。
测试方法应结合实际情况进行灵活选择,包括但不限于硬件在环(HIL)、整车在环(VIL),此处推荐使用物理级传感器信号仿真设备来提高仿真的测试精度,如视频暗箱、视频注入、毫米波雷达回波模拟器、超声波雷达回波模拟器等。
仿真测试流程合规审查
仿真测试流程合规报告主要考察实际的测试环境是否满足仿真的基本要求,认定是否能够实现仿真场景的构建以及整体的闭环测试。审查重点为核心软硬件、车辆动力学标定、被测设备、信号流示意图四大部分:
1)核心软件:应描述场景仿真软件、车辆动力学仿真软件、试验管理软件、自动化测试软件(若有)的类型和版本;核心硬件:应描述实时仿真系统、机柜、数据采集板卡、通讯接口板卡、物理级传感器信号仿真设备(若有)的品牌与具体型号;
2)车辆动力学标定结果对比:应参考 GB/T 12544、GB/T12543、GB/T 12676、GB/T 6323等国家推荐标准,结合自身的试验条件,对车辆的横纵向参数进行标定,以提高模拟仿真的置信度;
3)被测设备:应描述该驾驶自动化系统的设计运行域以及可以释放的功能规范,同时对该系统的传感器配置以及主要参数进行说明,如镜头模组、毫米波雷达的安装位置、FOV、探测最大/最小距离、加速度、精度、目标物信息等;
4)信号流示意图应说明执行本次测试的整体交互逻辑,包含测试场景、车辆动力学模型、传感器物理级信号、被测对象的数据流向与通讯方式,同时指出各软件的部署位置与硬件架构。
高速前车紧急避障
(1)测试场景
测试道路至少为符合中国高速公路定义的三车道,试验车辆位于左侧第一车道,跟随前方目标车匀速行驶,车间时距设定为最小档。目标车前方存在路障,当距离路障 20m 时紧急变道至第二车道。如图所示。

(2)测试方法
完成测试场景构建及环境配置后,激活系统,设置试验车辆及目标车辆的运动参数。试验车辆及交通流参数如表所示。
(3)试验退出条件
当满足下列条件时,试验退出:
试验车辆避开障碍物或发生碰撞,则该试验中止。
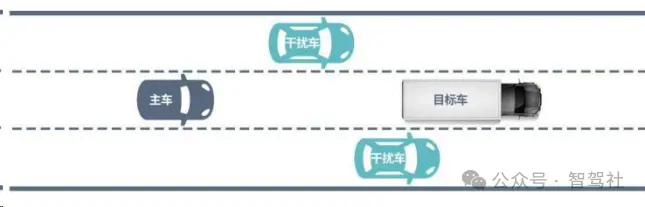
低速重卡走走停停
(1)测试场景
测试道路至少为符合中国城市道路定义的三车道,试验车辆位于中间车道,跟随前方目标车(重型卡车)匀速行驶,车间时距设定为最小档;干扰车辆位于左侧第一车道及第三车道匀速行驶。当系统稳定跟车运行后,目标车制动 2s 后以 3.5m/s2的加速度加速至 10km/h,如图所示。
(2)测试方法
完成测试场景构建及环境配置后,激活系统,设置试验车辆及目标车辆的运动参数。试验车辆及交通流参数如表所示。

(3)试验退出条件
当满足下列条件时,试验退出:
试验车辆车速小于目标车辆车速或发生碰撞,则该试验中止。
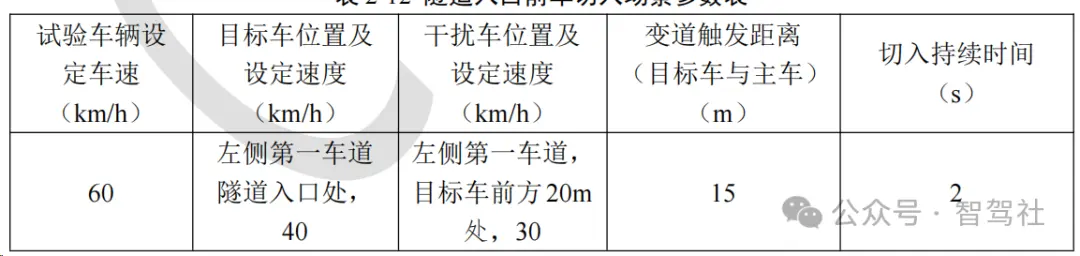
隧道入口前车切入
(1)测试场景
测试道路至少为符合中国公路隧道定义的三车道,试验车辆位于中间车道巡线行驶,目标车辆位于左侧第一车道隧道入口处;干扰车辆位于目标车前方 20m 处。当主车与目标车距离为 15m 时,目标车与干扰车开始匀速行驶,此时目标车向中间车道切入。如图所示。
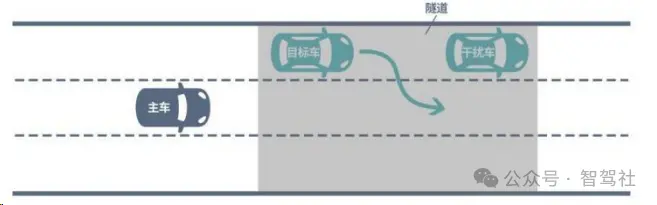
(2)测试方法
完成测试场景构建及环境配置后,激活系统,设置试验车辆及目标车辆的运动参数。试验车辆及交通流参数如表所示。
(3)试验退出条件
当满足下列条件时,试验退出:
试验车辆车速小于目标车辆车速或发生碰撞,则该试验中止。
模糊弯道并线行驶
(1)测试场景
测试道路至少为符合中国道路定义的两车道,道路类型为弯道,且白虚线的模糊程度(Fade)设为 0.5。试验车辆位于左侧第一车道巡线行驶,干扰车辆位于两车道中间并线行驶。如图所示。
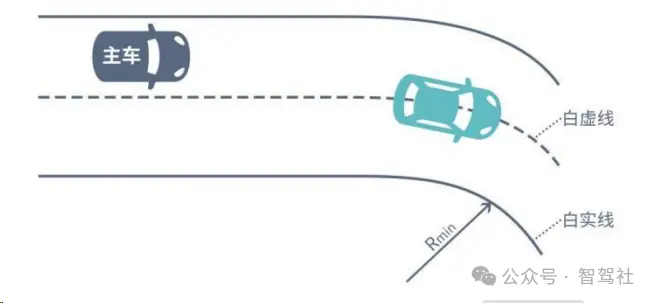
(2)测试方法
完成测试场景构建及环境配置后,激活系统,设置试验车辆及目标车辆的运动参数。试验车辆及交通流参数如表所示。

(3)试验退出条件
当满足下列条件时,试验退出:
1)试验车辆车速小于目标车辆车速或发生碰撞,则该试验中止。
2)当前车道试验车辆前路外沿接触车道内沿,则该试验中止。
车辆限速标志识别
(1)测试场景
测试道路至少为符合中国道路定义的三车道,试验车辆位于中间车道巡线行驶,前方200m 处存在车辆限速标识牌,最低车速为 50km/h,最高车速为 70km/h。如图所示。

(2)测试方法
完成测试场景构建及环境配置后,激活系统,设置试验车辆及目标车辆的运动参数。试验车辆及交通流参数如表所示。
(3)试验退出条件
当满足下列条件时,试验退出:
试验车辆通过标志牌 3s 后,则该试验中止。
驾驶员交互
系统状态
系统关闭/开启/激活状态
1)车辆启动后,在关闭系统的情况下记录系统提示信息;
2)车辆启动后,开启系统,并在系统未激活的状态下记录系统提示信息;
3)车辆启动后,开启系统,并在系统激活的状态下记录系统提示信息。
车道线缺失
1)测试道路为只有一条车道线的长直道,试验车辆以 60km/h 的设定车速激活功能行
驶,如图所示。
2)测试道路为只有一条车道线的长直道,车道线存在20-30m的缺失。试验车辆以60km/h的设定车速激活功能并驶过车道线缺失路段,如图所示。
3)测试道路为具有两条车道线的长直道,两条车道线存在 20-30m 的缺失。试验车辆以 60km/h 的设定车速激活功能并驶过车道线缺失路段,如图所示。

4)测试道路为具有两条车道线的弯道,弯道外侧车道线存在 20-30m 的缺失。试验车辆以 60km/h 的设定车速激活功能并驶过车道线缺失路段,如图所示。
驾驶员监测
脱手检测
(1)测试场景
测试道路为一条长直道和弯道的组合,道路总长不小于 625m,弯道转弯半径不小于250m,试验车辆以 30km/h 的设定车速在长直道内开启组合驾驶辅助功能。
(2)测试方法
系统开启,驾驶员手扶方向盘且不施加握力,待车辆行驶状态稳定,驾驶员双手脱离方向盘,并对方向盘、仪表以及报警声音录制。如车辆具备 MRM,则应确保车辆在弯道内进入 MRM 状态。
(3)试验退出条件
当满足下列条件时,试验退出:
1)数据录制达到 1min15s;
2)系统关闭或系统进入 MRM。
闭眼检测及低头检测
(1)测试场景
测试道路为一条长直道和弯道的组合,连接处平滑过渡,直道长度不小于 300m,试验40车辆以 30km/h 的设定车速在长直道内开启组合驾驶辅助功能。
(2)测试方法
调整坐姿和座椅高度至驾驶员头部完整的出现在摄像头视野范围内。系统开启,待车辆行驶状态稳定,驾驶员分别闭眼 2s 以上以及低头看向方向盘中央 3s 以上,并对仪表及驾驶员面部进行图像录制,以及报警声音录制。如车辆具备 MRM,则应确保车辆在弯道内进入MRM 状态。
(3)试验退出条件
当满足下列条件时,试验退出:
1)数据录制达到 1min30s;
2)系统关闭或系统进入 MRM。
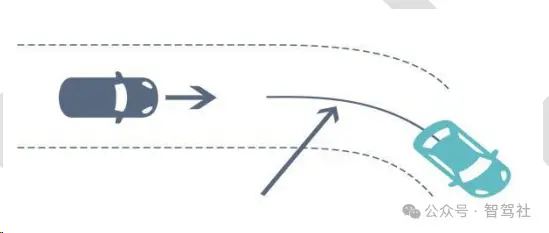
人机共驾
(1)测试场景
测试道路为一条长直道,长度不小于 300m,试验车辆以 60km/h 的设定车速在长直道内激活功能,如图所示。
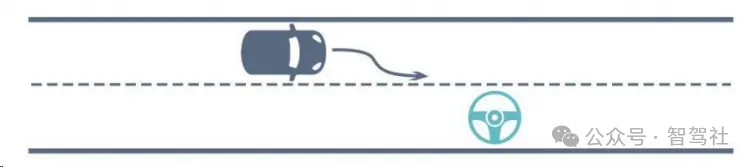
(2)测试方法
系统激活,待车辆行驶状态稳定,驾驶员向左或向右转动方向盘,使功能取消激活。试验车辆进入相邻车道保持居中行驶。
(3)试验退出条件
当满足下列条件时,试验退出:
1)功能再次激活;
2)试验车辆进入相邻车道保持居中行驶 10s。
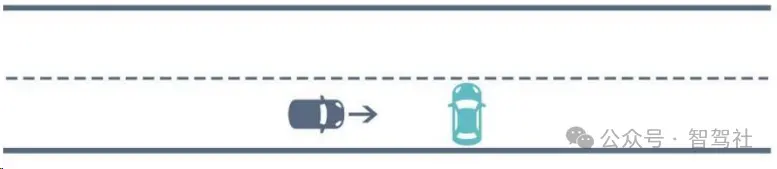
误响应
车辆直线行驶超越车辆/行人/电动自行车
(1)测试场景
测试道路为至少包含二条车道的长直道。试验车辆驶向前方目标物,如图所示。
(2)测试方法
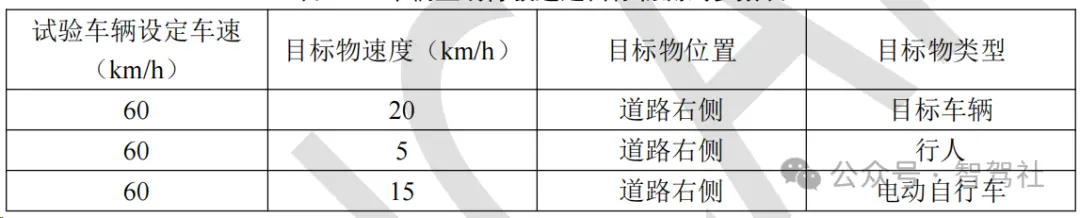
系统激活后,试验车辆在距离目标物 200m 前达到预期车速,并以稳定状态驶向前方目标物,驾驶员双手握住方向盘,不得干扰系统的正常驾驶。试验车辆设定车速及目标车位置如表所示。
目标车辆在道路右侧指:目标车辆左侧车轮外沿与右侧车道线外侧重合。
目标行人在道路右侧指:目标行人左侧边缘与右侧车道线外侧重合。
目标自行车在道路右侧指:目标自行车左侧边缘与右侧车道线外侧重合。
(3)试验退出条件
当满足下列条件时,试验退出:
1)试验车辆车尾越过目标物;
2)试验车辆刹停。



编辑推荐




最新资讯
-
R171.01对DCAS的要求⑤
2025-04-20 10:58
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
