




 广告
广告





















































基于carsim的分布式驱动汽车原地掉头功能仿真

技术背景
分布式驱动汽车原地掉头转向,这一技术主要依赖于两种不同的机制来实现。
一种是无转向系统的方式。这种方法常见于坦克等军事车辆,它们通过使两侧履带或车轮反向旋转来实现原地转向。比亚迪仰望U8也展示了类似的转向方式,但在高附着力路面上使用时,对轮胎、传动系统和路面会存在一定程度上的磨损。
另一种方式则是依赖于汽车的分布式转向系统,比如独立解耦的拉杆转向或主销转向机构。JEEP的一款概念车Hurricane,它采用了前后对称的结构设计,实现了零转弯半径的原地掉头功能。此方式轮胎在转向过程中不存在横向摩擦,因此可以在沥青路面上实现流畅的原地转向。这种设计需要对车辆的传动系统、悬架结构和转向机构进行复杂的调整和优化。同时,为了实现原地转向,同轴车轮需要反向转动,这就需要增加额外的离合器和差速器来控制车轮的动力传输。
针对无转向系统原地转向模式,对汽车原地转向时的运动过程进行分析,发现只要保证四个车轮中,左侧两车轮跟右侧两车轮的轮速相同方向相反,便可以实现汽车原地掉头这一功能。于是,为实现这一功能,通过采用PID控制器计算扭矩的方法,使得四个车轮的扭矩不断增加,直到轮速达到参考值为止,以此达到控制目标。
车辆通过常规转向模式能够完成绝大多数的转向或掉头任务,但是在实际道路的曲率半径小于车辆最小转弯半径时,由于物理运动限制,车辆无法完成这类转向任务。坦克掉头模式能够使车辆在某些道路的宽度仅支持车辆单向行驶,且该宽度必须大于前后轮轴距的道路上进行掉头转向动作。此模式下,保持每个轮的转角为零,通过控制系统控制每个车轮的扭矩,使得左侧车轮的转速与右侧车轮的转速相等,方向相反,以此实现车辆的原地掉头。图1是该模式下的运动学简图。
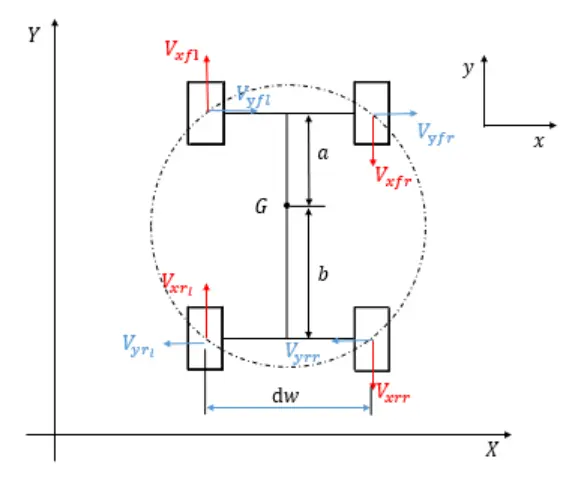
图1 原地掉头功能示意图
原地掉头控制原理
汽车实现原地掉头的机理在于对左、右两侧车轮的速度控制,控制目标是保证左、右轮轮速大小相等,方向相反。控制方法是采用控制器对每个车轮进行转速控制,进而计算出每个轮对应的扭矩控制量,单个计算周期内的扭矩计算如下:

其中 是PID控制参数,
是PID控制参数, 是车轮参考速度,
是车轮参考速度,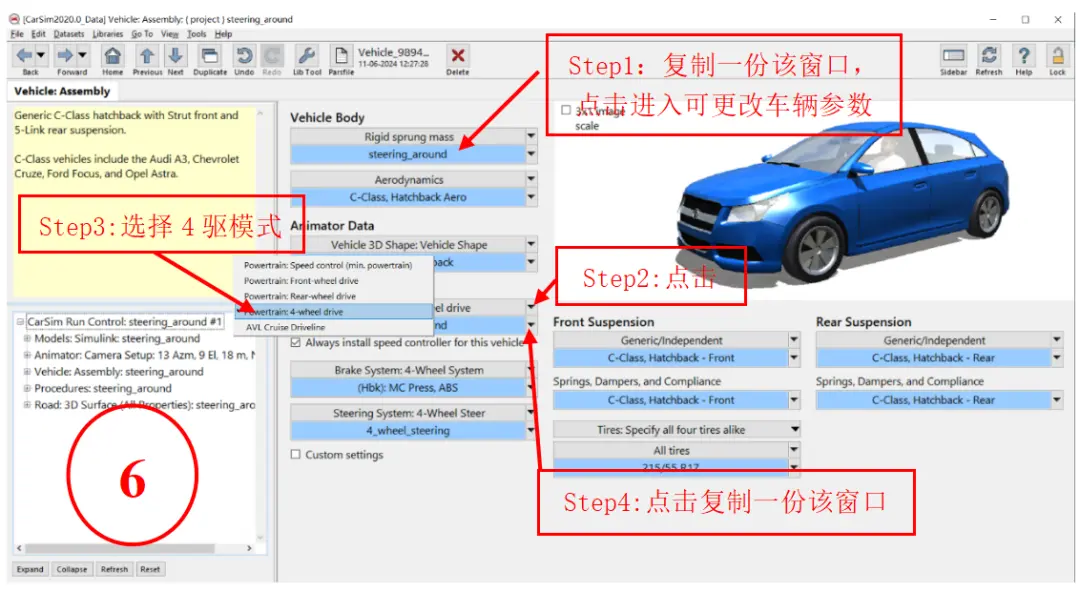 是车轮实际速度。
是车轮实际速度。
CarSim-Simulink联合仿真步骤
本文将利用carsim和simulink联合仿真,对四个车轮的轮端扭矩进行独立解耦控制,进而实现车辆原地掉头功能。
1)配置CarSim中的车辆模型
在进入CarSim软件主页面时,操作主页的状态通常如下图所示:
- 下一篇:汽车安全传感器的解决方案
- 上一篇:飞轮储能提升充电速度,突破电网容量限制-ZOOZ







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
