




 广告
广告





















































电动汽车漂移技术:实现原理、控制系统与应用
2024-12-02 09:28:34· 来源:汽车电子与软件 作者:北湾南巷

2.3 制动系统组成
接收油门踏板、制动踏板、方向盘等信号。
油门踏板:指示驱动系统输出驱动力大小。
制动踏板:指示制动系统输出制动力大小。
方向盘:指示车辆转向方向和角度。
根据预设算法判断是否进入漂移控制状态。
控制轮端制动装置输出制动力,实现制动和漂移控制。
可选配漂移按键,方便驾驶员启动和结束自动漂移模式。
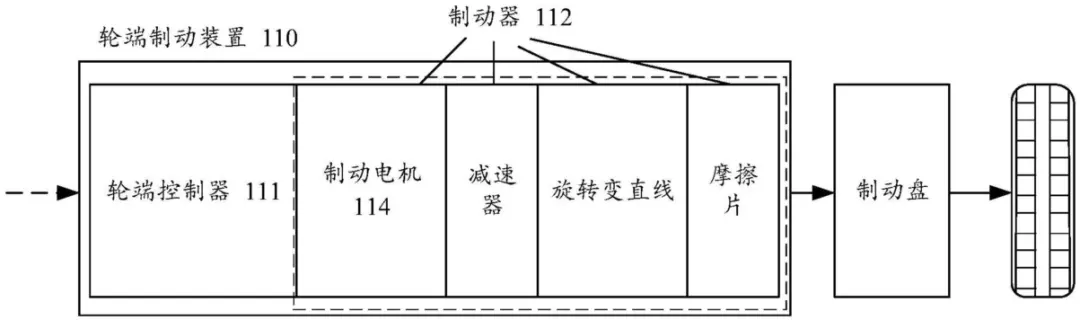
位于每个车轮处,用于向刹车盘输出制动力。
可以输出不同大小的制动力,也可以输出相同大小的制动力。
由中央控制器指示需要输出的制动力。
中央控制器:
轮端制动装置:
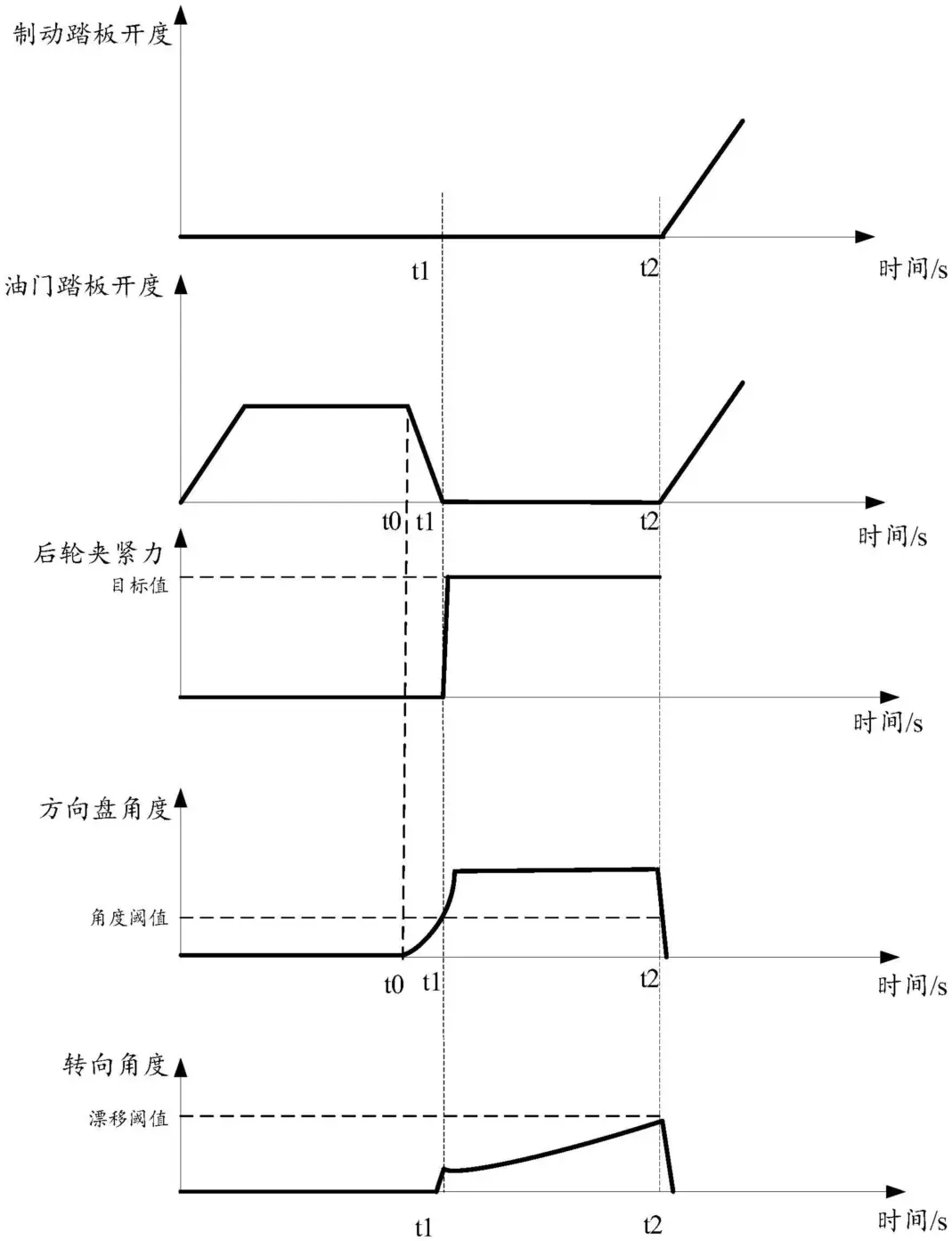
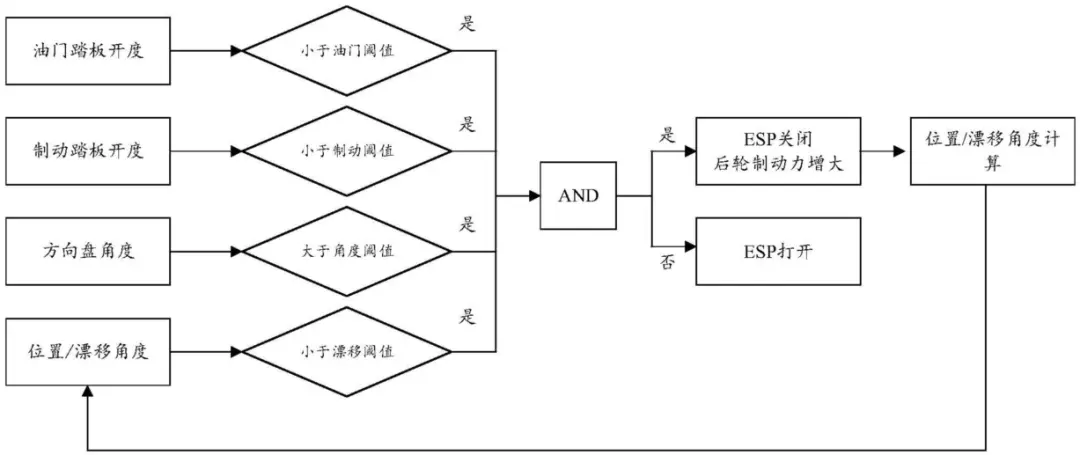
2.4 控制方法
判断条件:车速大于阈值、油门踏板开度小于阈值、制动踏板开度小于阈值、方向盘转角大于阈值、转向角度小于阈值。



编辑推荐




最新资讯
-
风噪测试在电动汽车时代的关键作用
2025-04-29 11:34
-
汉航车辆性能测试系列之操纵稳定性测试--汉
2025-04-29 11:09
-
新能源汽车热管理系统验证体系PITMS正式发
2025-04-29 11:09
-
试验载荷谱采集
2025-04-29 11:07
-
APx500 软件演示模式 (Demo Mode) 竟有这些
2025-04-29 08:37
