




 广告
广告





















































电动汽车漂移技术:实现原理、控制系统与应用

驾驶员干预与安全性:
步骤操作说明系统状态/控制车辆行为
1. 启动漂移模式
驾驶员按下漂移按键ESP、ABS、CRB、DTC、ESC关闭电动汽车进入自动漂移模式
2. 加速阶段
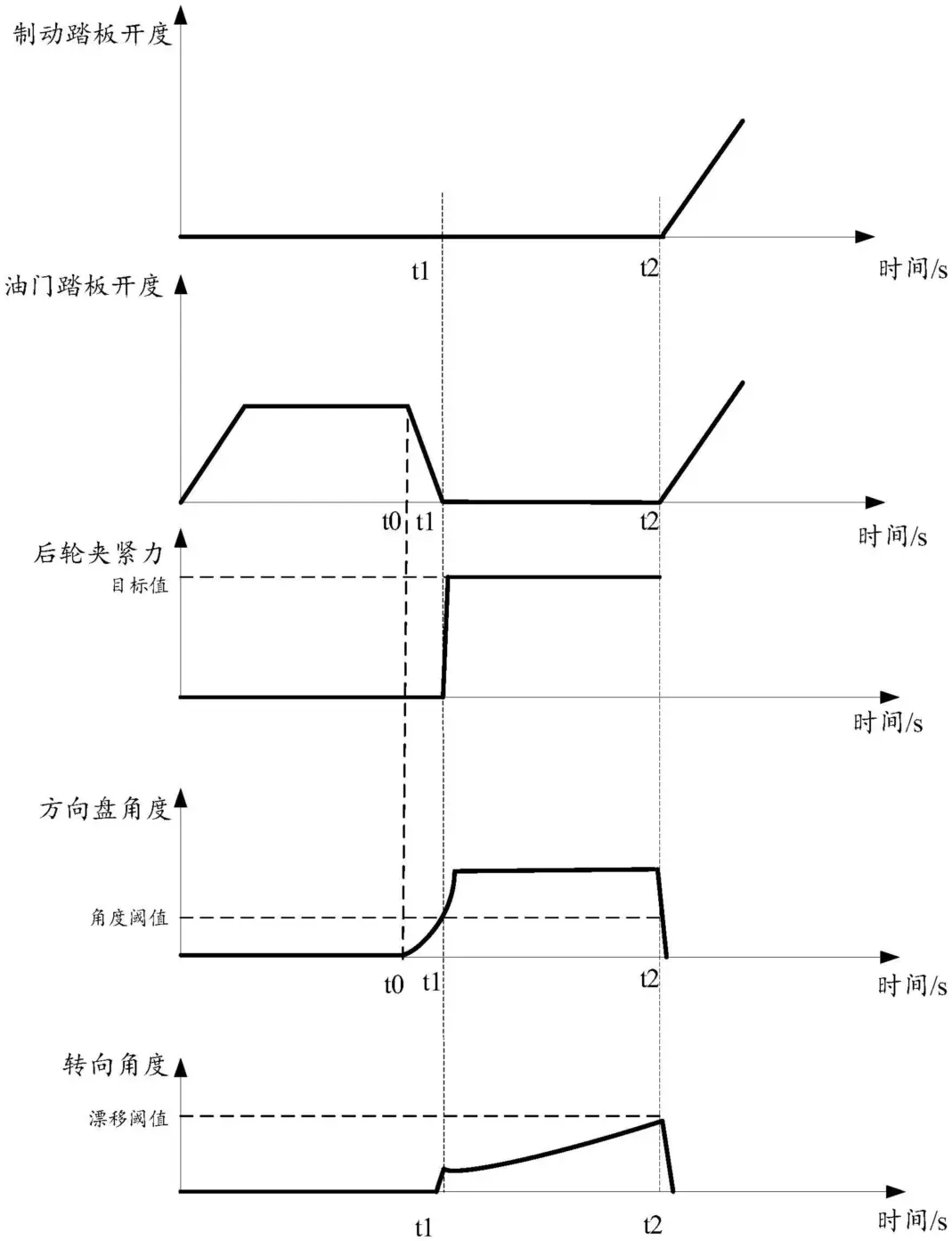
驾驶员踩下油门踏板加速动力总成输出扭矩电动汽车加速至车速阈值以上,准备漂移
3. 松开油门、转动方向盘
驾驶员在t0时刻松开油门踏板,未踩制动踏板,转动方向盘系统检测油门和制动踏板开度、方向盘转角电动汽车准备进入漂移状态
4. 进入自动漂移控制
满足以下条件:t1时刻,油门踏板开度 < 阈值、制动踏板开度 < 阈值、方向盘转角 > 阈值、转向角度 < 漂移阈值中央控制器控制后轮对应的轮端制动装置输出制动力电动汽车开始自动漂移,后轮制动力逐渐增大至目标值
5. 自动漂移进行中
t1到t2时间段内中央控制器持续调控制动力转向角度逐渐增大,电动汽车处于漂移状态
6. 退出自动漂移控制
在t2时刻,驾驶员踩下制动踏板或油门踏板,或反打方向盘至小于或等于角度阈值,或转向角度 ≥ 漂移阈值ESP重新打开,介入控制中央控制器退出自动漂移控制,稳定控制开始
7. 稳定控制恢复
ESP重新打开后中央控制器控制另一侧两个车轮的轮端制动装置输出制动力车身姿态恢复稳态
8. 响应驾驶员控制
t2时刻之后中央控制器响应制动踏板开度指示,车辆控制器输出油门指示的扭矩车辆恢复常规驾驶状态,四轮制动装置响应制动力输出
这项技术通过精密的制动控制算法和硬件设计,实现了电动汽车的自动漂移功能,降低了漂移操作门槛,提高了驾驶体验和安全性,有望在未来电动汽车中广泛应用。



编辑推荐




最新资讯
-
风噪测试在电动汽车时代的关键作用
2025-04-29 11:34
-
汉航车辆性能测试系列之操纵稳定性测试--汉
2025-04-29 11:09
-
新能源汽车热管理系统验证体系PITMS正式发
2025-04-29 11:09
-
试验载荷谱采集
2025-04-29 11:07
-
APx500 软件演示模式 (Demo Mode) 竟有这些
2025-04-29 08:37
