




 广告
广告





















































驾驶行为谱系及反常驾驶行为建模

在开放道路实现正常、安全、高效的行驶是自动驾驶汽车的终极目标。自动驾驶汽车在开放世界中的交互对象复杂多样,其行为是影响自动驾驶车辆安全的关键因素之一。本文首先对驾驶行为进行分类、对驾驶行为谱系进行分解,随后基于跳跃—扩散方程对反常驾驶行为进行建模,并利用该模型对部分反常轨迹进行仿真。
关键词:驾驶行为;反常驾驶;跟驰模型;汽车安全;交通安全;跳跃—扩散模型
作者:浙江大学智能交通研究所 祁宏生
01.驾驶行为谱系
1.1 谱系分解
得益于以大模型为代表的人工智能技术的进步,近年来自动驾驶得到了长足的发展。安全是自动驾驶技术的关键考虑要素之一。自动驾驶车辆安全性能的检验方法有多种。国内研发机构普遍先进行仿真测试,再到封闭测试区测试,最后到实际道路的自动驾驶开放路段测试这3歩走的方式进行。开放世界中与自动驾驶车辆交互的交通参与者类型多样、行为复杂,是汽车安全风险的重要来源之一。按照决策来源,本文提出的驾驶行为谱系如图1所示。任意时刻,与自动驾驶车辆交互的任一行为主体属于该谱系中的某一种。
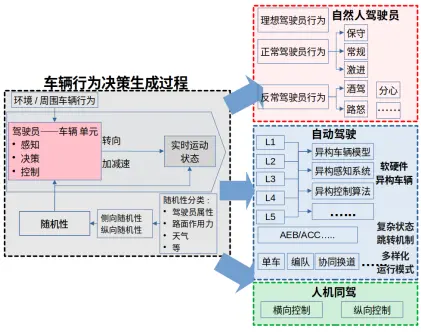
图1 驾驶行为谱系
如图1所示,车辆的驾驶行为决策生成过程为:驾驶员—车辆单元进行感知决策、生成操作指令,指令主要为加减速和转向。由加减速和转向操作、形成车辆的实时运动状态。依据决策来源,将谱系分解为三类:自然人驾驶员、自动驾驶车辆、人机共驾。第一类由人类驾驶员控制车辆运动;第二类主要由算法/机器控制车辆运动,第三类的运动状态同时受人类和算法/机器的操控。
(1) 自然人驾驶员
自然人驾驶员同样也有许多种类。本文将其分为三类:理想驾驶行为、正常驾驶行为、反常驾驶行为。
a)理想驾驶行为指的是其行为可以由数学或物理方程精确刻画,对其轨迹进行预测、也可达到较高精度。典型的模型包括交通流理论中的跟驰模型、换道模型、Carla中的PID模型等。
b)第二类行为是正常驾驶行为,也是绝大部分驾驶员所体现出来的行为。这类行为的特征是存在一定的、可解释的随机性。例如,其随机性来源于图1中的路面随机激励输入、驾驶员感知误差和操纵误差等。大体而言,这类行为也可以用数学/物理模型刻画,其轨迹也可用模型进行预测。该类行为可以进一步细分为保守型、常规型、激进型等。例如,激进驾驶员的跟车时距较小、而保守驾驶员的加减速较为平缓。
c)第三类行为是反常驾驶行为。典型反常驾驶行为包括酒驾/醉驾/毒驾、路怒、蛇形走位、长时间跨车道线行驶、分心驾驶(如使用手机)等。之所以称之为“反常”,是因为其行为背离了驾驶任务(如分心)、或者被严重干扰(如醉驾)。反常驾驶行为的运动轨迹与前两类存在相当的差距,目前尚无微观交通模型对其进行刻画。
上述行为在数据上体现为什么样的差别?为了回答这一问题,作者用数据(受控跟驰实验数据、highD数据和分心情况下的驾驶模拟器数据数1(Taamneh, 2017))对第二类和第三类的区别进行了分析(关于第一类,可以参考著名的微观交通仿真软件SUMO中的跟驰模型列表2、国产微观交通模型TESS NG的模型列表3等)。纵向驾驶情况下的加速度分布如图2-a和b所示。图2-a为(Taamneh, 2017)中、分心情况下的驾驶模拟器实验数据、图2-b为受控跟驰实验。可以看到,自然驾驶员在稳定跟车场景下的加速度分布(图 2-b)近似服从正态分布,而分心驾驶场景下与正态分布不同;图2-c和d为侧向驾驶情况下、侧向波动(车辆距离本车道中心线的距离)的标准差。图2-c表明分心情况下、侧向波动迅速增大;而图2-d表明绝大部分车辆的std在0.2m左右,部分车辆呈现为较大的侧向波动。

图2
(a)(Taamneh, 2017)中分心情况下的加速度分布;
(b)数据4中的加速度分布;
(c)分心情况下(Taamneh, 2017)的侧向距离std;
(d)highd中的侧向距离std
(2) 自动驾驶行为
驾驶行为谱系第二类是自动驾驶,其运动状态主要由机器或者算法生成。自动驾驶车辆的软硬件架构各异、算法不同;自动驾驶车辆有多种工作状态,例如ACC、AEB等。此外,车辆还可以工作于不同的模式,如单车、编队、协同换道等。
(3) 人机同驾
当车辆的运动状态由人和机器共同决定时、形成了驾驶行为谱系中的第三类:人机同驾。人机同驾是人机共驾车辆工作在特定模式(类似于双驾双控(宗长富, 代昌华, & 张东. 2021))下的结果。人机同驾可以应用于车辆的侧向(吴超仲 et al., 2022; 谢有浩 et al., 2020)和纵向控制(刘平 et al., 2024)。
1.2 谱系内不同行为之间的关系
需要对上述行为谱系进一步说明:
● 谱系的构成随着技术条件的变化而进化,新行为有可能出现、并改变谱系构成。例如,远程辅助驾驶;
● 行为主体可以在谱系内不同类别之间转换。例如人类可以接管自动驾驶车辆。但转换并非总是瞬时的。例如,从机器到驾驶员控制权切换完毕后,人类驾驶员的驾驶绩效不一定能立刻达到最高点(张晖 et al., 2023)。Merat et al.(2014)发现在紧急情况下,虽然自然驾驶人能在 7~9s接管车辆, 但是保持车辆横向稳定却需要 35~40s的控制时间;
● 谱系内不同类别之间存在相互影响。研究表明,人类驾驶员在混入自动驾驶车流后,其行为特征发生明显改变(Zwart, Kamphuis, and Cleij 2023; Wen, Cui, and Jian 2022),包括较小的车头时距(降低6.38%)以及TTC(降低14.29%)。
02.现有建模方法在刻画反常行为方面的缺陷
反常驾驶行为对自动驾驶车辆的安全造成较大风险。自动驾驶仿真测试是应对该类行为的可行技术手段。现有自动驾驶仿真侧重传感器仿真、车辆动力学仿真、各类物体三维模型仿真,对交通流行为描述的解决方案主要是接入各类交通流仿真软件(赵祥模, 2023)。交通流仿真软件背后的技术为微观交通流理论/模型。目前微观交通行为建模方法包括如下类别:
● 传统微观交通流模型,例如Gipps模型、著名的IDM模型等。这类模型可参考Ni(2015);
● 基于深度学习的驾驶人模型,利用LSTM、GAN、GNN、Transformer等各类深度学习方法,从数据中提取行为特征、并对微观交通行为轨迹进行刻画;
● 基于强化学习的驾驶人模型,典型工作例如马依宁(2023)。
上述方法各有优劣,已有文献对其进行了详尽归纳(He, 2022)。本文仅从反常行为驾驶这一角度、对上述建模的技术路线进行论述:
● 现有的微观交通流模型基于正常行为假设(例如驾驶员稳定跟随前车、驾驶员能稳定保持在车道线内、驾驶员会保持一定车距等),已有部分工作、改进微观模型,然而,全面刻画反常驾驶轨迹还需进一步研究。本文的反常行为模型是这方面的努力之一;
● 基于数据的建模方法。反常行为属于典型的长尾场景,目前学术界和工业界积累了相当多的路测数据,然而这些数据是否覆盖了足够多的反常行为值得探讨。反常行为的提取也需要构建相应的方法;
● 强化学习方法构建反常行为,该类方法目前存在一部分研究成果(马依宁等,2023)。总所周知,强化学习需要指定reward函数、构建训练流程。利用强化学习、对反常行为进行刻画,还需进一步探索。
03.反常驾驶行为建模
3.1 建模思路
为了对反常驾驶行为进行建模,首先归纳正常驾驶行为的特征:(1)驾驶员对周围车辆和环境(标志标线等)有准确的感知;(2)纵向上能稳定跟随前车、侧向上能稳定维持其在车道内的位置;(3)正常驾驶行为不会导致较高的风险水平。基于和正常行为的对比,提出反常行为表征及处理思路如图 3所示。反常行为分解为纵向(A1、A2)、侧向(B1~B4)两个维度以及风险水平risk level(A3和B5、A4和B6)。
纵向维度包括:
● A1: 前车的感知(leader perception)。如酒驾/醉驾/毒驾情况下,驾驶员无法准确感知与前车的相对距离,从而影响轨迹;
● A2: 均衡状态(equilibrium point)。即使当前车匀速行驶时、后车也无法维持稳定跟车状态,产生波动(如新手驾驶员)。
侧向维度包括:
● B1: 车道/道路的感知。在酒驾情况下,驾驶员无法准确感知车道线、道路边界等;
● B2: 缺乏明确的侧向目标位置。理想的侧向目标是本车道中心线或者目标车道中心线。当驾驶员分心情况下,无法通过轨迹确定其侧向目标位置、导致车辆侧向波动;
● B3: 侧向波动。自然人驾驶员在正常情况下、与本车道中心线的距离可近似正态分布,其标准差约为0.2~0.3米左右。然而,反常驾驶环境下、侧向来回波动较大。例如,新手驾驶员;
● B4: 完全侧向自由运动。当驾驶员失去对车辆的控制、或者驾驶员失去意识,车辆呈现侧向无控制状态。
风险水平的因素考虑两类:驾驶员对周围车辆的假设、驾驶员对本车操控性能的假设。正常驾驶环境下,驾驶员会对周围驾驶员以及本车的操控性能有一定的假设。
与之对应,反常驾驶分为:
● A3和B5:驾驶员对周围车辆的假设过于乐观,当这些车辆表现异常时、本车驾驶员无法在规定时间内进行规避动作、产生风险;
● A4和B6:驾驶员对自车的操控性能的假设过于乐观、或无法产生准确操控结果(侧向和纵向的加减速),从而产生风险。
上述解释了图 3中的Block A。Block B的解释见下述章节。
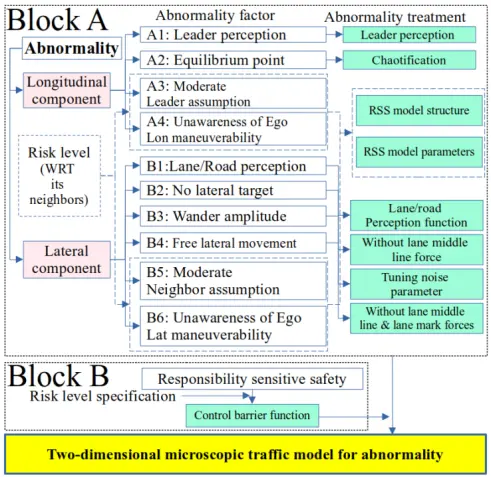
图 3 反常行为分解、及建模思路



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
