




 广告
广告





















































驾驶行为谱系及反常驾驶行为建模

蛇形走位、侧向完全自由运动可以通过舍弃车道中心线力、舍弃车道线力等项来刻画。如图10-a所示,为车辆没有车道中心线和车道线的力的侧向运动结果,可以看到本模型可以刻画车辆的侧向异常行为。
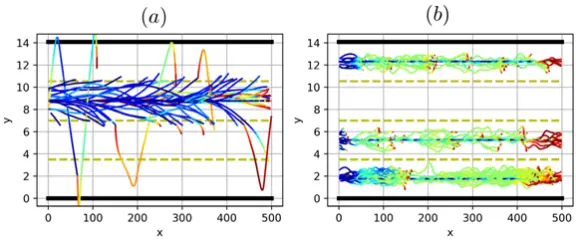
图10 蛇形走位和侧向完全自由运动
3.4.3 醉驾
当驾驶员酒驾/醉驾/毒驾时,无法准确感知道路元素(车道线、车道中心线、周围车辆等,例如图 8中的感知误差)。假设驾驶员的车道线感知偏差为Zdrunk,服从OU过程如Eq.8。均值μdrunk为-1米。

Eq.8
图11-a中、车道1中的驾驶员都设定为醉驾驾驶员。从轨迹可以看出,车辆的运行偏离真实的车道中心线,部分车辆产生围绕车道线的较大波动、影响到了图11-b中车道2的车辆轨迹。图11-c和d是正常驾驶车流,可以看出和图11-a及b存在差距。
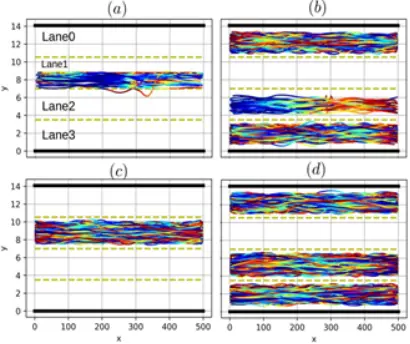
图 11 酒驾/醉驾/毒驾等
3.4.4 纵向驾驶
通过设定(公式Eq. 4中)αchaos大小可以控制车辆纵向行为的波动性。设定前车恒速行驶、后车通过本文提出的反常行为模型驾驶、调整αchaos大小得到的结果如图 12。图12-a~c为确定性IDM模型(无μdrunk);图12-d~f为αchaos=1;图12-d~f为αchaos=2。确定性条件下,后车稳定跟随前车;混沌项考虑后,即使前车匀速行驶、后车也产生预设的波动。
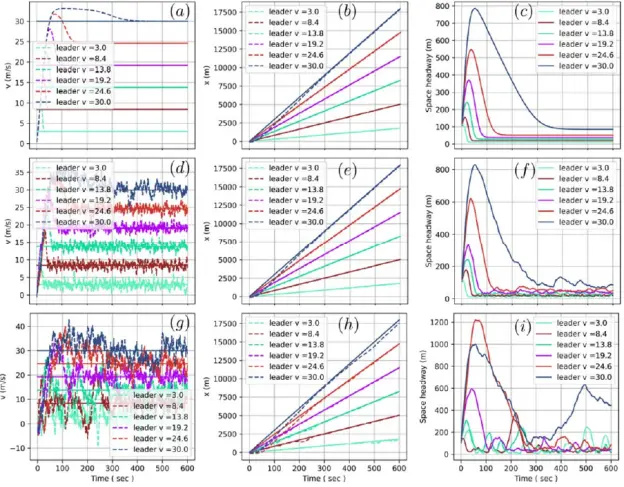
图 12 纵向反常驾驶:纵向波动
04.
结语
驾驶行为是道路交通安全风险的主要来源之一。高等级自动驾驶车辆在开放世界中的交互对象复杂多样。本文将其分为自然人驾驶员、自动驾驶、人机同驾三类。并对自然人驾驶员中的“反常驾驶行为”进行建模,提出了基于跳跃—扩散随机过程的2D反常驾驶行为模型。并利用该模型对部分反常驾驶行为的轨迹进行了仿真。
感知预测—决策—控制是目前自动驾驶算法的代表性数据流。后续工作包括:1)基于生成式人工智能对反常行为进行合成;2)将反常行为纳入预测决策控制的流程。
1. https://github.com/yaohandong/HISTORIC-DATA
2. https://sumo.dlr.de/docs/Definition_of_Vehicles%2C_Vehicle_Types%2C_and_Routes.html#car-following_models
3. https://www.jidatraffic.com/#/brochure 中的第六章6.2和6.3节
4. https://github.com/yaohandong/HISTORIC-DATA
祁宏生 | 作者
张玉新 | 审核



编辑推荐




最新资讯
-
每秒采集100万个数据 | 下一代USB DAQ产品-
2025-04-07 14:12
-
重型商用车辆和客车的动力学——振动环境
2025-04-07 14:11
-
2025年10大隐形车衣品牌排行榜
2025-04-07 10:40
-
沃尔沃卡车与Greenlane合作推动商业电动化
2025-04-07 08:42
-
江铃晶马:美标转欧标充电结构专利
2025-04-07 08:39
