




 广告
广告





















































ENCAP2026对前向碰撞避免的要求①

1.背景&定义&测试设备
2.测试条件
3.测试程序
4.测试执行
5.评估标准和评分
1.背景&定义&测试设备
2026年1月起,欧洲新车测评规程将实行ENCAP2026-2028版。
由前文《25年6月的新车要按ENCAP2026测试了?》可知,ENCAP2026分为四部分,分别是:
安全行驶Safe Driving
碰撞避免Crash Avoidance
碰撞保护Crash Protection
撞后安全Post Crash Safety
碰撞避免Crash Avoidance满分100分,分为前向碰撞避免(60分)、车道偏离碰撞避免(20分)、加速抑制/油门防误踩(20分)三部分。
碰撞避免前向碰撞60车辆和摩托车40行人和自行车20车道偏离碰撞20仅自车10车辆和摩托车10加速抑制20车辆和摩托车10行人和自行车10
前向碰撞避免的60分中,车辆和动力两轮车(摩托车)总分为40分,行人和自行车骑行者总分为20分。
需要注意的时,ENCAP2026相比过往版本新增了扩展场景和鲁棒性测试,标准场景满分只有80%,扩展场景有10%的得分,鲁棒性测试有10%的得分。
峰值制动系数PBC(Peak Braking Coefficient):使用UNECE R13H中规定的方法,根据混动轮胎的最大减速量测量轮胎与路面的摩擦。
自动紧急制动AEB(Autonomous Emergency Braking):年辆在检测到可能发生碰撞时自动施加的制动,以降低车速并可能避免碰撞。
前向碰撞警告FCW(Forward Collision Warning):车辆在检测到可能发生碰撞时自动提供的视听警告,以提醒驾驶员。
自动紧急转向AES(Autonomous Emergency Steering):车辆在检测到可能发生的碰撞时自动应用的转向,以引导车辆并可能避免碰撞。
紧急转向支持ESS(Emergency Steering Support):一种系统,检测到可能的碰撞时响应驾驶员的转向输入,以改变车辆路径并可能避免碰撞。
车辆宽度(Vehicle width):忽略后视镜、侧标灯、轮胎压力指示器、方向指示灯、位置灯、柔性挡泥板和轮胎侧壁与地面接触的变形偏转部分的车辆最宽值。
汽车对行人(Car-to-Pedestrian):当没有刹车和/或转向动作时,车辆与其路径上的成人或儿童之间的碰撞。
汽车对自行车骑手(Car-to-Bicyclist):当没有刹车和/或转向动作时,车辆与成年自行车骑手在其路径上发生碰撞。
汽车对摩托车骑手(Car-to-Motorcyclist):当没有利车和/或转向时,车辆和摩托车骑手在其路径上发生碰撞。
标准范围(Standard range):最基本、参数最受控的标准测试场景。标准范围内的测试被认为是任何给定测试场景的基本性能期望。
扩展范围(Extended range):是指在标准范围的测试中引入较小复杂程度的测试点。该范围的变化仅限于VUT和/或测试目标的撞击位置和纵向速度的变化。

鲁棒性层(Robustness layer):指引入测试复杂性和变化,旨在挑战车辆系统并鼓动可靠的“真实世界”性能。
被测车辆VUT(Vehicle under test):指根据本协议测试的车辆,配备了预碰撞缓解或避免系统。
ENCAP成人目标EPTa:指ISO 19206-2:2018中规定的本协议中使用的关节式成人行人目标。
ENCAP儿童目标EPTc:指ISO 19206-2:2018中规定的本协议中使用的关节式儿童行人目标。
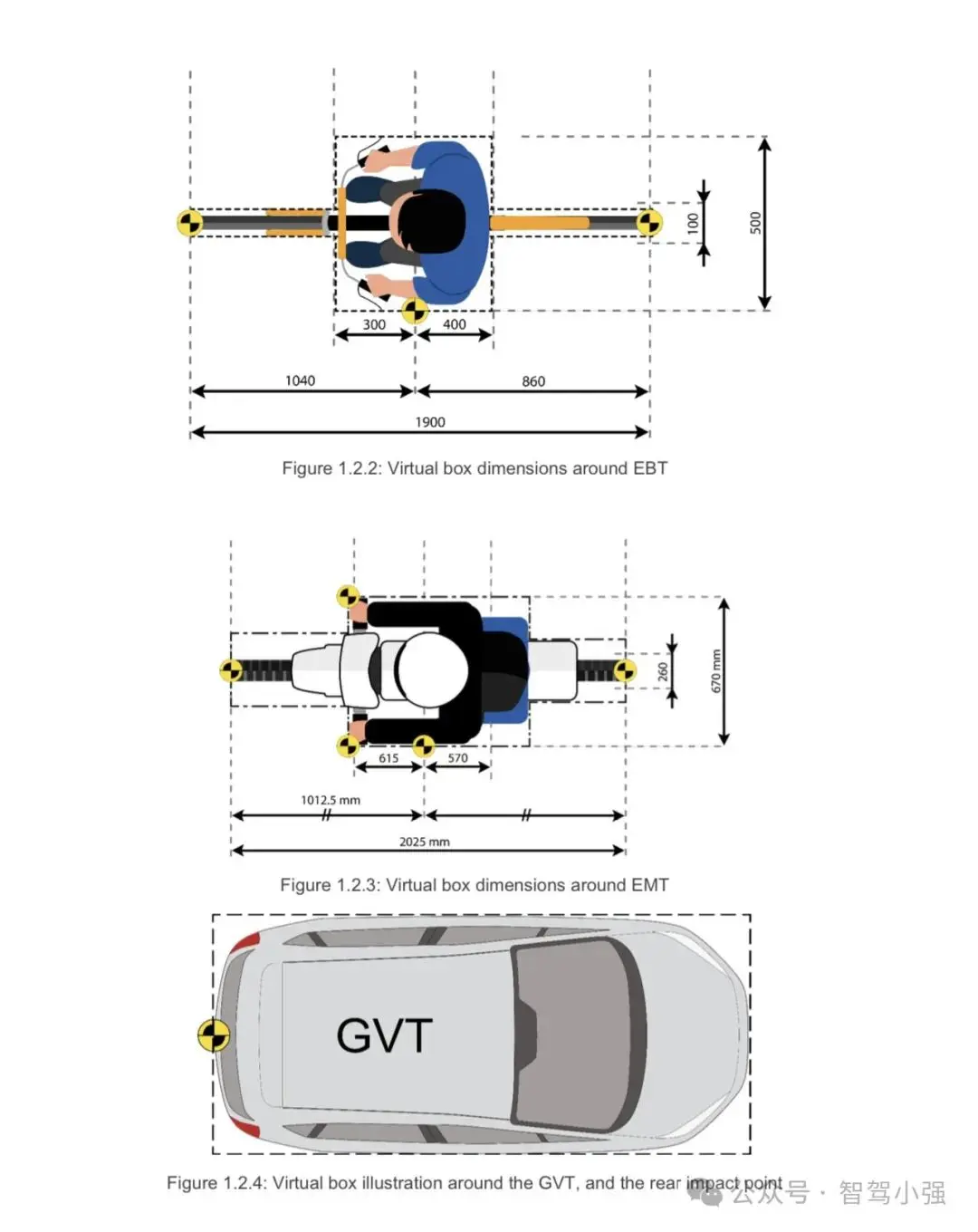
ENCAP自行车骑手目标EBTa:指ISO 19206-4:2020中规定的本协议中使用的成人自行车骑手和自行车目标。
ENCAP摩托车骑手目标EMT:指本协议中使用的摩托车手骑目标,在发布时将引用ISO 19206-5中定义的摩托车骑手和摩托车目标。
全球车辆目标GVT(Global Vehicle Target):指IS019206-3:2021中定义的本协议中使用的车辆目标。
次要其他车辆SOV(Secondary Other Vehicle):指在CCFhol场景中被VUT超越的车辆。该车辆可以是GVT或真实车辆。
真实摩托车(Real Motorcycle):指可以在本协议的盲点监测测试中使用的摩托车骑手目标,作为EMT的替代方案。真实摩托车应是一种经过型式认证的两轮摩托车,设计最大速度至少为80km/h,没有前整流罩或挡风玻璃。它应与EMT非常相似,轴距在1405~1445mm之间。
碰撞时间TTC(Time To Collision):指VUT撞击测试目标之前的剩余时间,假设VUT和测试目标将继续以其行驶速度行驶。
TAEB:表示AEB系统激活的时间。激活时间是通过识别滤波后的加速度信号低于-1m/s²的最后一个数据点来确定的,然后返回到加速度第一次穿过-0.3 m/s²的时间点。
TFCW:表示FCW的声音警告开始的时间。起点由声音识别(采集系统采集到的时间)确定。
Vimpact:表示VUT前端或后端周围的轮廓线与测试目标(EPTa、 EPTc、EBTa和EMT)周围的虚拟框重合时的速度。
Vrel_test:是指VUT和测试目标(EPT、EBT或EMT)之间的相对速度,方法是从测试开始时VUT的纵向速度中减去测试目标的纵向速度。
Vrel_impact:是指VUT撞击试验目标(EPT、EBT或EMT)的相对速度,方法是碰撞时的Vimpact减去试验目标的纵向速度。
汽车对行人的远端成人(CPFA):一种碰撞,在这种碰撞中,车辆向前行驶,朝者从远端穿过其路径的成年行人,当没有刹车动作时,车辆的正面结构将撞到行人。
汽车对行人的近端成人(CPNA):一种碰撞,在这种碰撞中,车辆向前行驶,朝着从近端穿过其路径的成年行人,当没有刹车动作时,车辆的正面结构将撞到行人。
主驾侧为远端,副驾侧为近端。
我国的左舵车,远端为左侧,近端为右侧。
英国/日本的右舵车,远端为右侧,近端为左侧。
汽车对行人的侧面儿童遮挡(CPNCO):一种碰撞,在这种碰撞中,车辆向前行驶,一个儿童行人从近端遮挡后面跑出穿过车辆的路径,当没有刹车动作时,车辆的正面结构将撞到行人。
汽车对行人的纵向成人(CPLA-25):一种碰撞,在这种碰撞中,车辆向前行驶,朝着车辆前面同向行走的成年行人,当没有制动动作或在FCW后启动回避转向动作时,车辆将在车辆宽度的25%处撞击行人。
汽车对行人的纵向成人(CPLA-50):一种碰撞,在这种碰撞中,车辆向前行驶,朝着在车辆前面同向行走的成年行人,在没有刹车动作的情况下,车辆将以车辆宽度的50%处撞击行人。
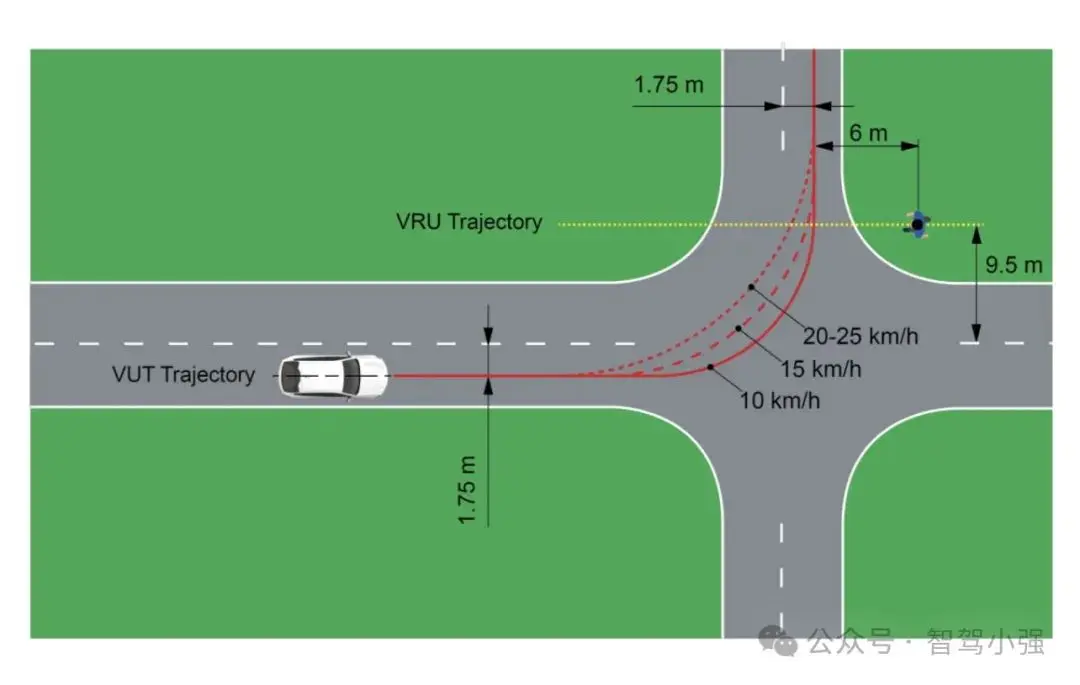
汽车对行人的转弯成人(CPTA):一种碰撞,在这种碰撞中,车辆在路口转弯时遇到穿过其路径的成年行人(在VUT转弯之前,与VUT的方向相同或相反),当没有刹车动作时,车辆将在车辆宽度的50%处撞击行人。
汽车对自行车骑手的近端成人(CBNA):一种碰撞,在这种碰撞中,一辆汽车向前行驶,朝着从近端穿过其路径的成年自行车骑手,当没有刹车动作时,车辆的正面结构将撞击自行车骑手。
汽车对自行车骑手的近端成人遮挡(CBNAO):一种碰撞,在这种碰撞中,车辆向前行驶,一个自行车骑手从近端遮挡后面骑出穿过车辆的路径,当没有刹车动作时,车辆的正面结构将撞到自行车骑行人。
汽车对自行车骑手的远端成人(CBFA):
一种碰撞,在这种碰撞中,一辆汽车向前行驶,朝着从远端穿过其路径的成年自行车骑手,当没有刹车动作时,车辆的正面结构将撞击自行车骑手。
汽年对自行车骑手的纵向成人(CBLA-25):一种碰撞,在这种碰撞中,车辆向前朝着与车辆前方相同方向骑行的自行车骑行者行驶,当没有制动动作或在FCW后启动回避转向动作时,车辆将在车辆宽度的25%处撞击自行车骑行者。
汽年对自行车骑手的纵向成人(CBLA-50):一种碰撞,在这种碰撞中,车辆向前朝着与车辆前方相同方向骑行的自行车骑行者行驶。在没有刹车动作的情况下,车辆将以车辆宽度的50%处撞击自行车骑手。
汽车对自行车骑手的转弯成人(CBTA):一种碰撞,在这种碰撞中,一辆汽车转向一名穿过其路径的自行车手,自行车以VUT转弯前相反的方向骑行,当没有利车动作时,车辆的正面结构将撞击自行车骑手。
汽车对摩托车骑手的后部静止(CMRs):一种碰撞,其中车辆向前行驶,朝向静止的摩托车手,车辆的正面结构撞上摩托车的后部。
汽车对摩托车手的后部制动(CMRb):一种碰撞,其中车辆向前行驶,朝着以恒定的速度行驶的摩托车手,然后摩托车骑手减速,车辆的正面结构撞击摩托车的后部。
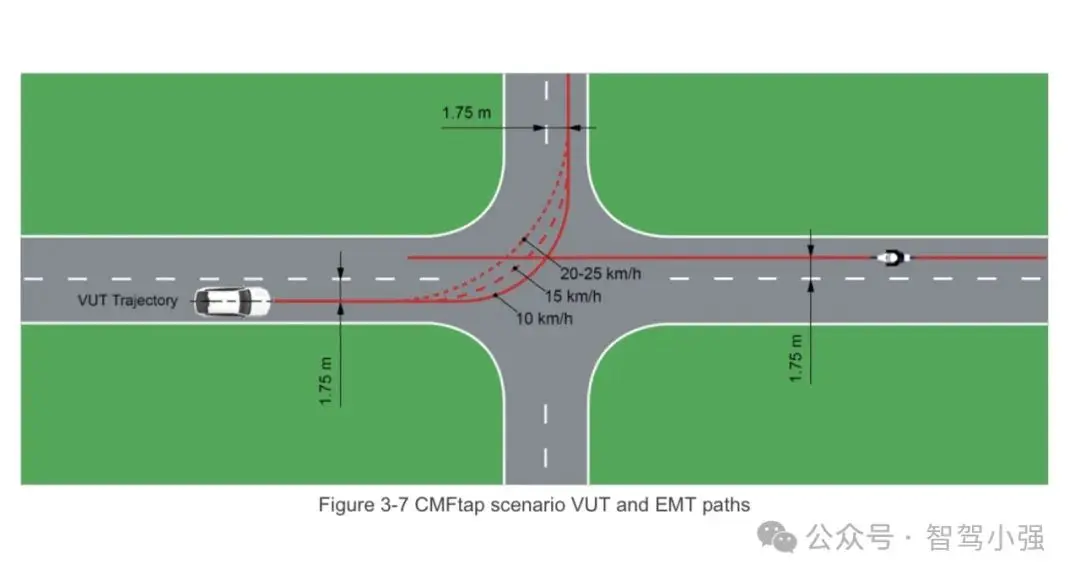
汽车对摩托车手的转弯穿越路径(CMFtap):一种碰撞,其中车辆以恒定速度穿过迎面而来的摩托车手的路径,车辆的正面结构撞到摩托车的前部。
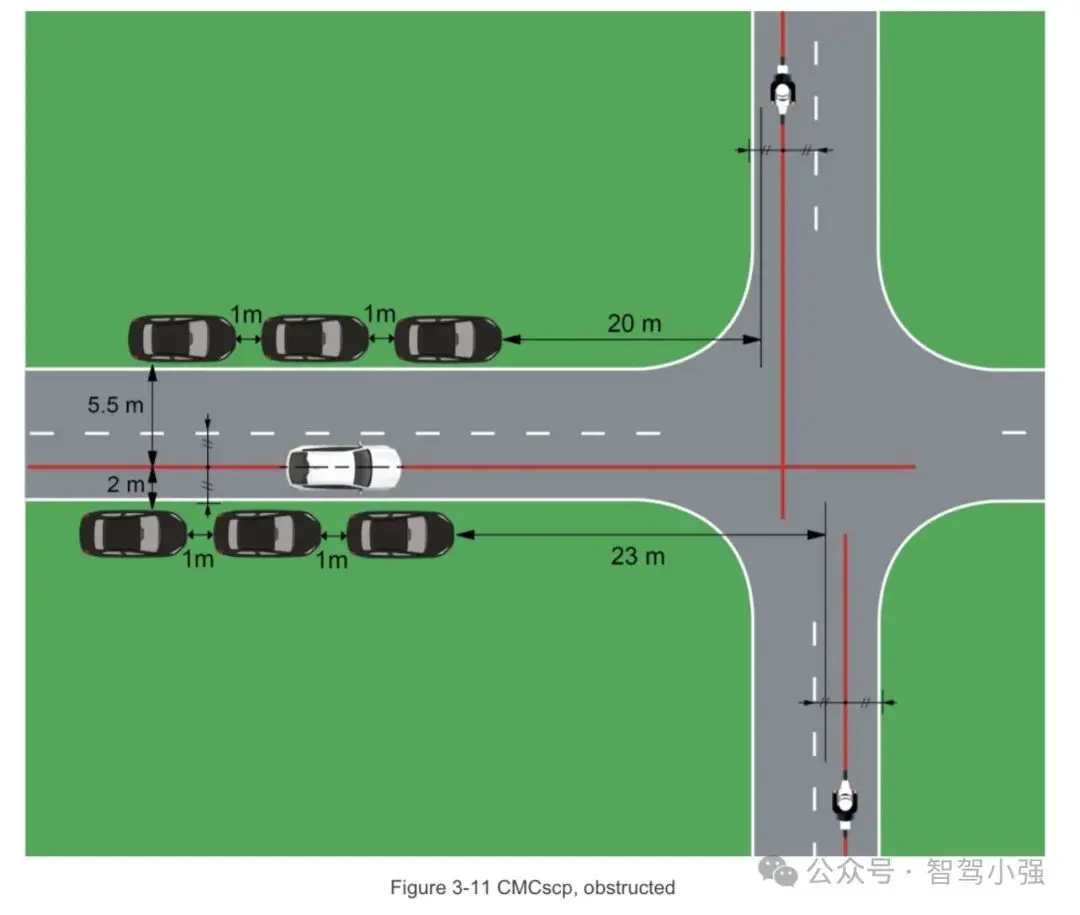
汽车对摩托车手的横穿直行(CMCscp):车辆沿着直道穿过路口向前行驶,朝向垂直穿越路口的摩托车手的碰撞。被测车辆VUT的正面结构撞击摩托车的侧面。
车对车的后部静止(CCRs):一种碰撞,其中被测车辆向前行驶,朝向静止的另一辆车,车辆的正面结构撞上另一辆车的后部。
车对车的后部移动(CCRm):一种碰撞,其中被测车辆向前行驶,向另一辆以恒定的速度行驶的车前进,车辆的正面结构撞上另一辆车的后部结构。
车对车的后部制动(CCRb):一种碰撞,其中被测车辆向前行驶,向另一辆以恒速行驶的车前进,然后前车减速,VRU的正面结构撞上前车的后部结构。
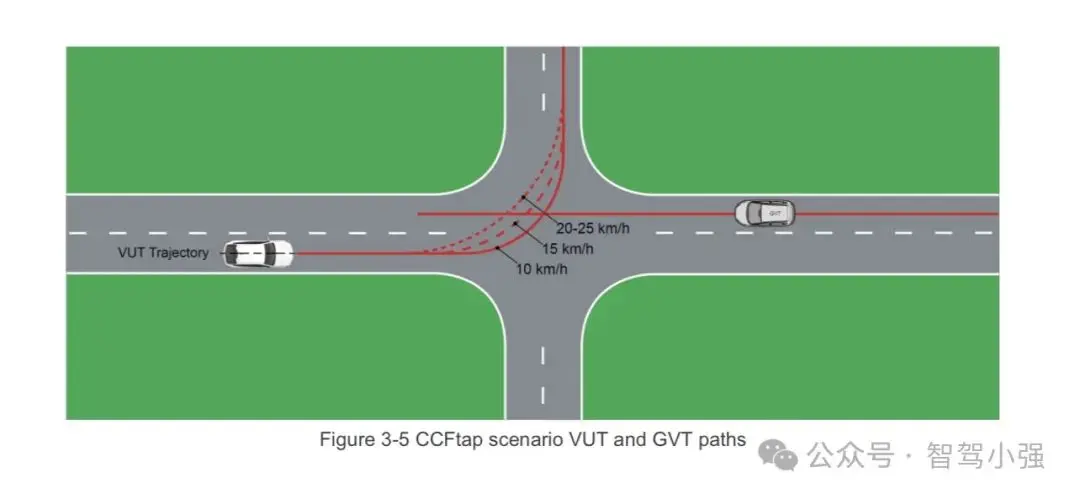
车对车的转弯穿越路径(CCFtap):一种碰撞,其中VRU在对向行驶的车辆的路径上转弯,VRU的正面结构撞上另一辆车的正面结构。
车对车的穿越直行(CCCscp):车辆沿着直道穿过路口向前行驶,朝向垂直穿越路口的另一辆车的碰撞。被测车辆VUT的正面结构撞击另一辆车的侧面。
车对车的对向来车直行(CCFhos):一种碰撞,VUT在其车道内沿着直线行驶,撞上了另一辆逆向行驶的车辆,该车己经漂移到与VUT相同的车道。VUT的正面结构撞上了另一辆车的正面结构。
车对车的对向来车换道(CCFhol):一种碰撞,VUT在其车道内沿着直线行驶,撞上了另一辆逆向行驶的车辆,该车辆故意进入VUT的车道试图超车。VUT的正面结构撞上了另一辆车的正面结构。
车道支持系统LSS(Lane Support System):纠正车辆前进方向以使车辆保持在其行驶车道内和/或警告驾驶员的系统
紧急车道保持ELK(Emergency Lane Keeping):默认航向校正,当检测到车辆即将偏离实线标记、道路边缘或进入相邻车道的对向或超车场景时,车辆会自动应用该校正。
1.1 参考坐标系
使用ISO 8855:2011中规定的约定,原点位于VUT中心线上的最前方点,用于动态数据测量。如下图所示,该参考系统应用于左驾驶和右驾驶车辆。在图中,左舵车辆显示了近侧和远侧。对于右舵车辆,近侧和远侧刚好反过来。

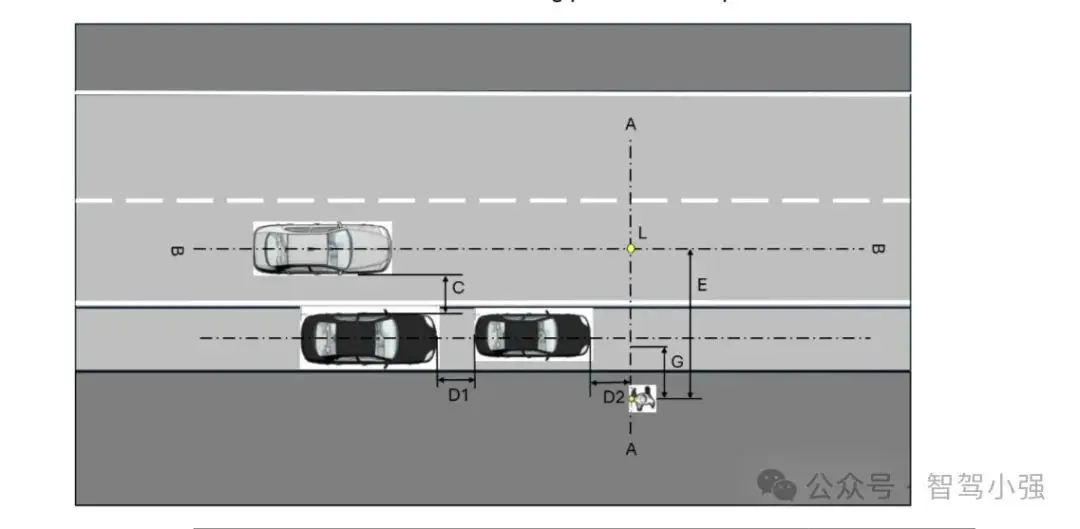
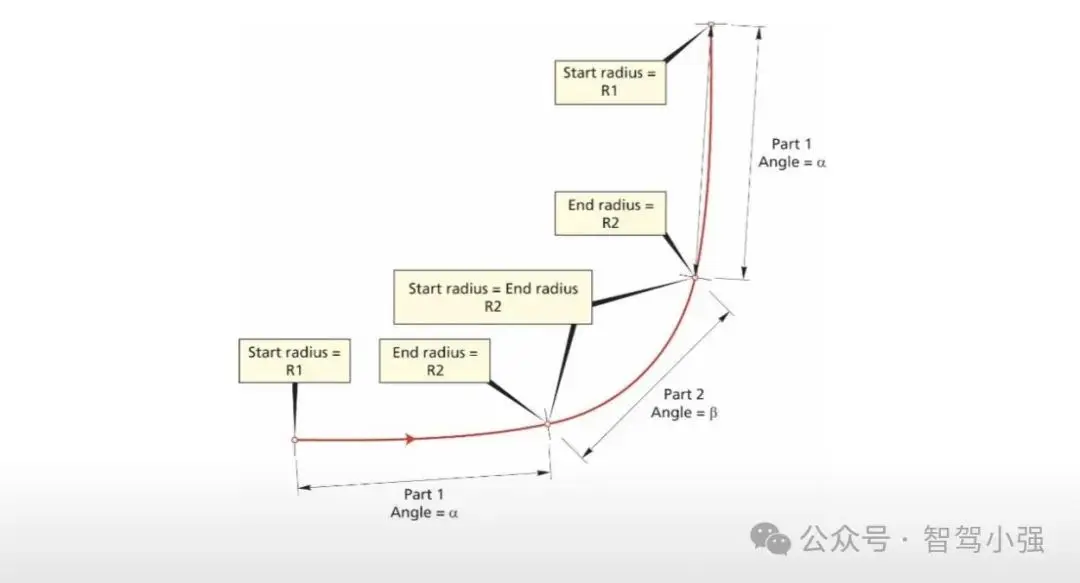
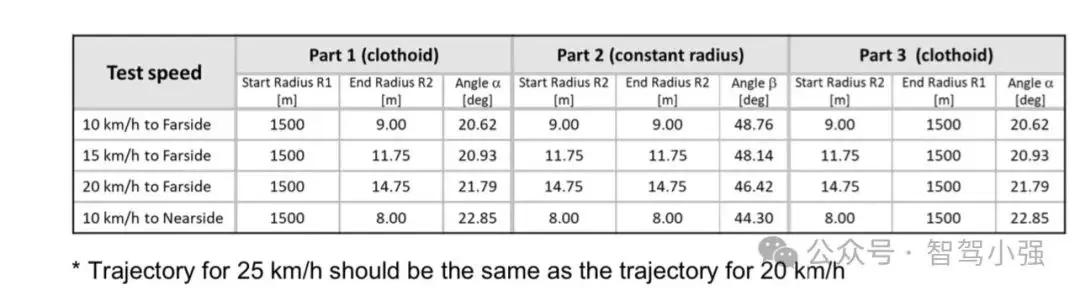
1.2 弯道场景的测试路径
对于CPTA、CBTA和CMFtap,应使用以下参数来创建测试路径。
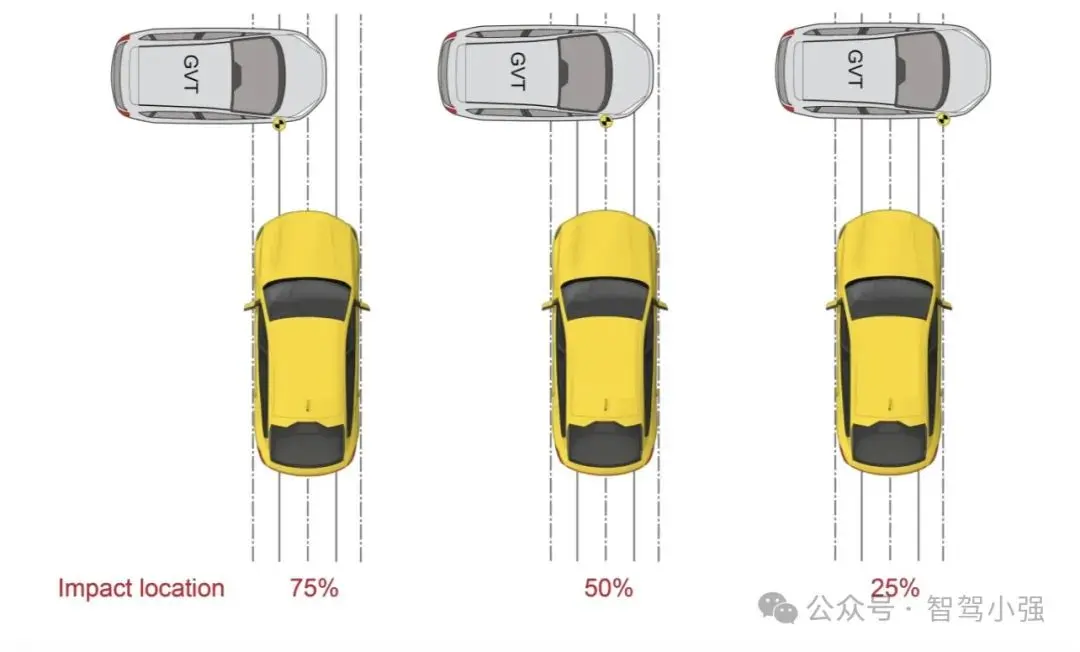
1.3 碰撞位置
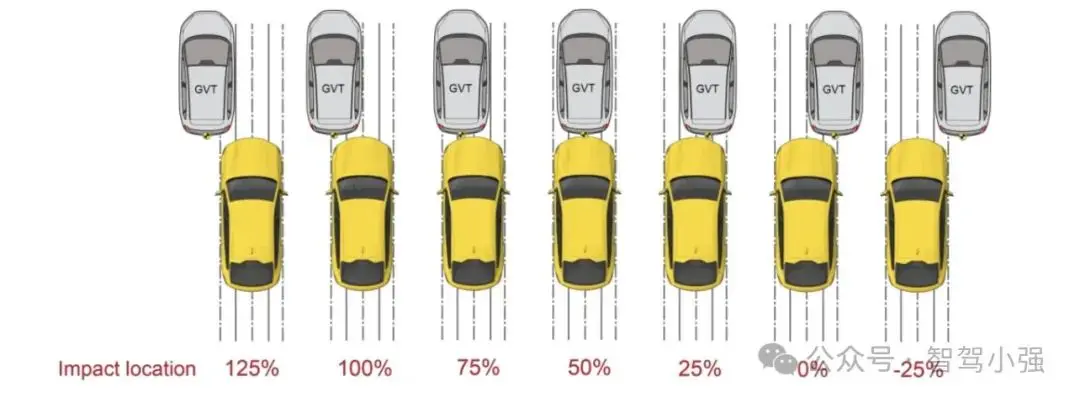
(a)车对车后中,与VUT和目标报考点“后部中点”相关的碰撞位置:
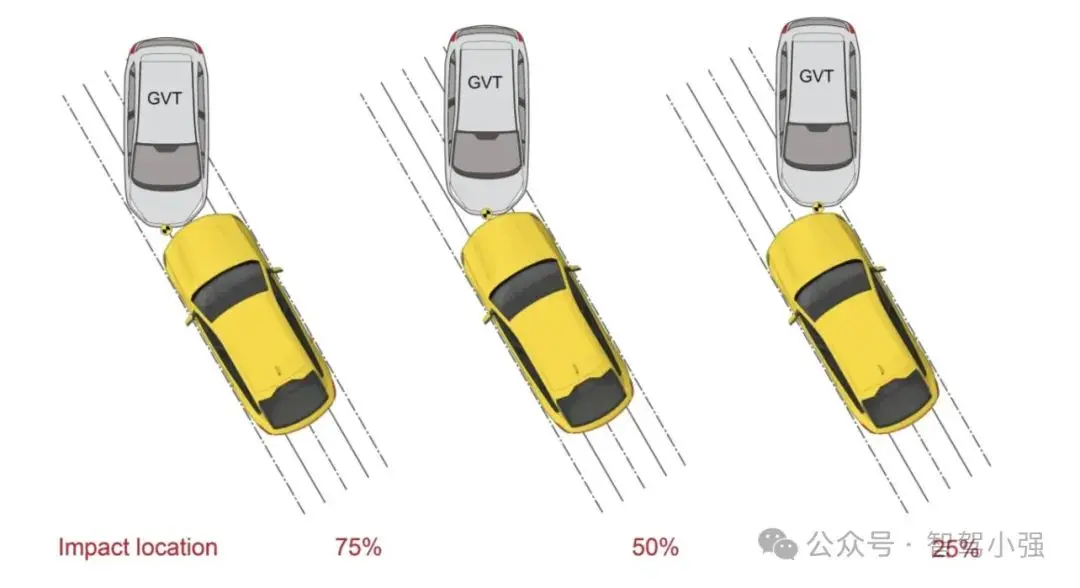
VUT最右侧为0%,最左侧为100%。 (b)车对车后+航向中,目标参考点会发生旋转,VUT撞击位置和旋转方向的不同组合,在撞击位置和目标参考点接触之前可能会与目标车的角边缘先发生碰撞: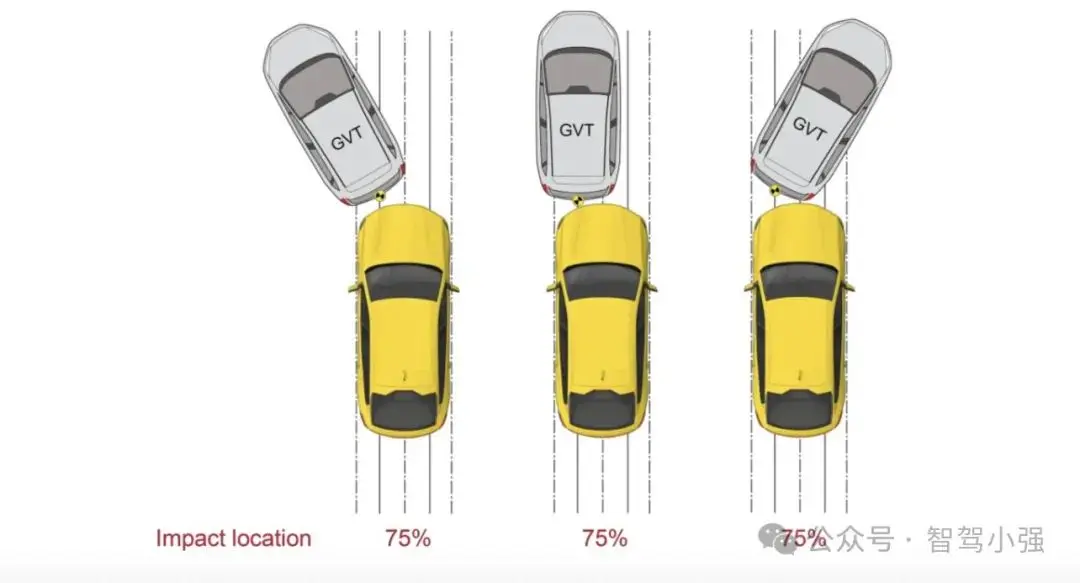 (c)车对车前端中,与VUT和目标参考点“前部中点”相关的撞击位置:
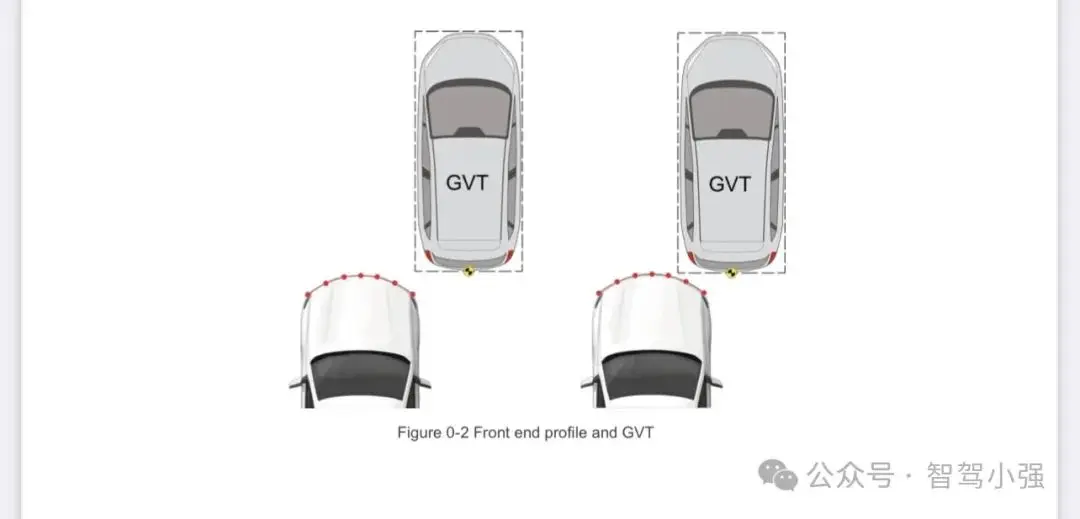
(c)车对车前端中,与VUT和目标参考点“前部中点”相关的撞击位置: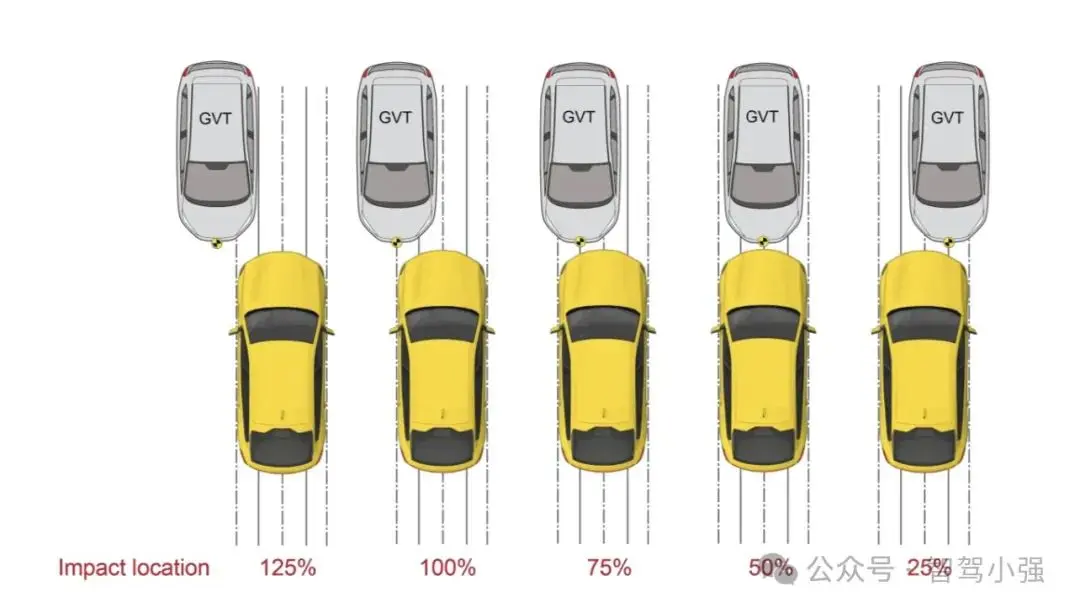 (d)车对车横穿中,与VUT和目标参考点“前桥中心”相关的撞击位置: (e)转弯路径中:
(d)车对车横穿中,与VUT和目标参考点“前桥中心”相关的撞击位置: (e)转弯路径中:



编辑推荐




最新资讯
-
国内现货!GRAS 46AE/146AE 限时优惠直降 5
2025-04-22 16:22
-
仿真测试必要性及标准法规
2025-04-22 16:22
-
福特退出中国,进入倒计时!
2025-04-22 16:21
-
高效三通道双向电源:释放测试潜能
2025-04-22 09:23
-
R171.01对DCAS的要求⑦
2025-04-22 09:20
