




 广告
广告





















































智驾未来:技术架构与测评规范前沿| 第一期:端到端智驾主流框架

2024年12月5日,中汽中心华东分中心荣耀启幕。其精准定位以上海为核心枢纽,强势覆盖华东大地,致力于打造成为极具影响力的区域性汽车行业顶级智库与高端技术服务机构。上海,乃改革开放之前沿要塞,亦是中国经济最为蓬勃活力之区域之一。中汽中心华东分中心全力聚焦端到端自动驾驶技术与大模型技术的深入研究及多元业务拓展。中汽研汽车科技(上海)有限公司作为华东分中心的坚实承载主体,积极投身于端到端智驾技术、大模型技术等新兴技术领域的深度研究与大胆探索。精心布局端到端智驾技术与大模型技术业务,广泛涵盖测试、咨询、产学研等多个维度,以创新引领行业发展潮流,为汽车产业的辉煌未来贡献力量。
当前,在国内外的企业中,端到端技术均受到广泛关注与积极布局。国际方面,特斯拉、Waymo 等企业在自动驾驶领域,通过大规模的数据采集,充分利用实际驾驶数据,持续优化其采用端到端算法的自动驾驶软件系统。在国内,华为、理想、小马智行、小鹏等众多企业亦紧跟端到端自动驾驶技术的发展步伐,相继推出面向量产的解决方案及车型。中汽研汽车科技(上海)有限公司同样高度重视自动驾驶端到端技术,积极与高校、科研机构以及企业等展开持续深入的研究与探索。
智驾系统的发展
模块化智能驾驶系统作为自动驾驶技术发展的早期范式,以其高度分离的任务架构和透明的设计流程成为工业界和学术界的核心研究方向。该方法将复杂的驾驶任务解构为感知、定位、规划、控制等多个独立模块,每个模块通过精心设计的算法完成特定子任务,并通过接口实现模块间的串联。然而,尽管模块化方法在实践中表现出较高的可调试性和鲁棒性,其本质上的分离结构也带来了信息传递与全局优化的固有局限性。在复杂动态环境中,这种模块化设计的缺陷尤其明显,难以适应驾驶场景的多样性和变化性。
基于此背景,端到端智驾应运而生,试图通过统一的深度学习框架直接学习从传感器输入到驾驶控制输出的全局映射。相比模块化系统,端到端方法旨在通过全局性优化克服模块化方法中因独立优化导致的全局次优问题,并通过数据驱动的方式实现对复杂驾驶任务的自动学习(图1)。
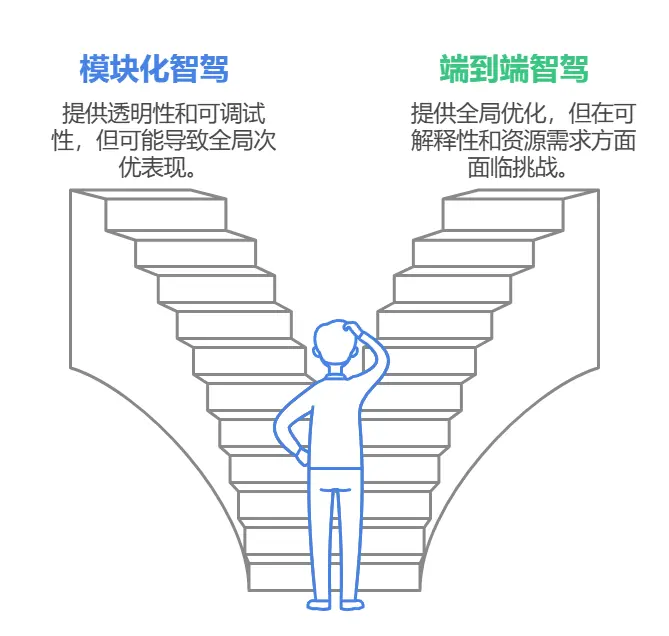
图1 模块化与端到端
端到端智驾系统的发展
【什么是端到端智驾?】
端到端自动驾驶的思想起源于深度学习技术的突破以及其在感知与决策领域的广泛应用。随着深度学习技术的发展,人们逐渐认识到神经网络的强大非线性拟合能力可以直接从传感器的原始输入到驾驶控制输出进行学习,从而简化系统架构,提升整体性能(图2)。
端到端自动驾驶的历史发展可以追溯到 2016 年 NVIDIA 团队提出的 seminal 研究,他们开发了一种基于卷积神经网络的模型,能够直接从摄像头图像生成转向角输出,从而省略了传统的中间模块设计。这一工作表明,通过深度学习模型对驾驶任务进行全局优化,不仅可以提高模型的学习效率,还能利用海量驾驶数据自动学习复杂的特征。然而,这种完全端到端的方法也带来了可解释性不足的问题,模型的黑箱特性使其在安全性和鲁棒性方面面临挑战。与此同时,学术界和工业界开始探索如何在端到端框架中平衡性能与可解释性,从而催生了两类不同的端到端范式:完全端到端方案与模块化端到端方案。
图2 端到端智驾内核
主流端到端智驾系统方案
【完全端到端方案】
完全端到端方案的核心思想是通过深度神经网络直接学习输入与输出之间的映射关系,省略传统的模块化设计。这种方法强调模型对全局驾驶任务的整体优化,典型的代表包括NVIDIA的DAVE-2系统(图3),以及后续的一系列强化学习驱动的驾驶策略模型。在这些系统中,感知、规划和控制完全融合为一个整体模型,依靠数据和计算资源支持,直接从场景输入(如摄像头或激光雷达数据)生成操作输出。这种方法的优势在于其简洁性和潜在的端到端优化能力,但其黑箱特性和对大量标注数据的依赖,也使其在复杂场景中的可用性受到限制。
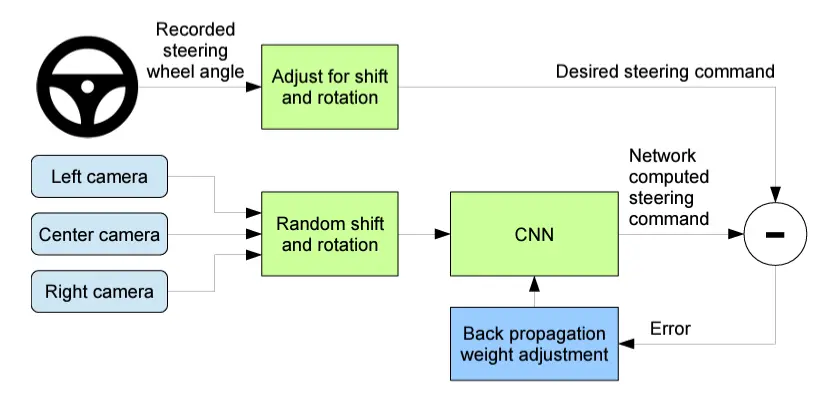
图3 NVIDA的DAVE-2系统[1]
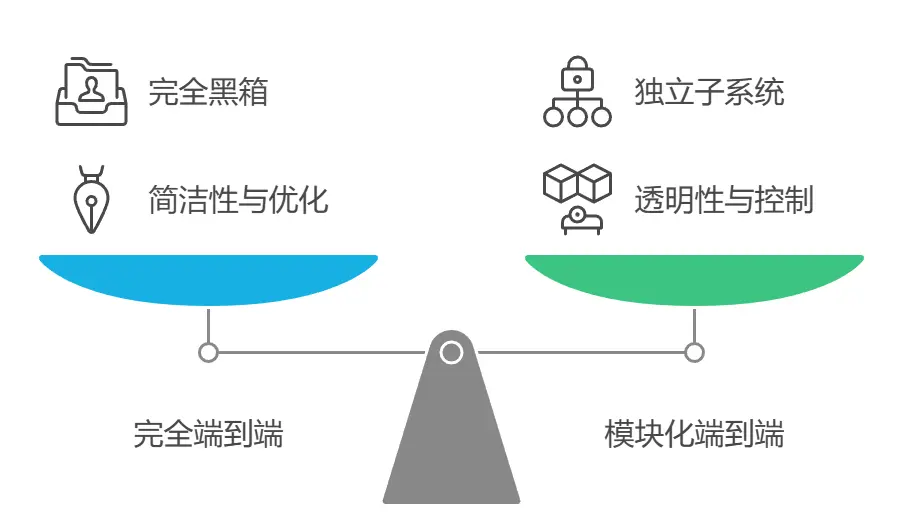
图4 完全端到端与模块化端到端
【模块化端到端方案】
与此相对,模块化端到端方案试图结合传统模块化设计的透明性和端到端方法的优化能力(图4)。具体来说,这种方案将传统自动驾驶系统中的感知、规划和控制模块保留为相对独立的子系统,但通过深度学习方法对每个模块进行端到端优化,甚至在模块之间构建联合优化机制。这种方法允许研究者利用端到端方法的优势,同时保持各模块的可解释性和可控性,从而在性能与安全性之间找到平衡。
模块化端到端自动驾驶的核心在于,通过深度学习实现对各独立模块的端到端优化,并引入跨模块的信息共享和联合训练机制。这一方法得益于神经网络对复杂模式的学习能力,显著提升了感知和决策模块的性能(图5)。例如,深度卷积神经网络(CNN)在感知模块中的应用使得目标检测、语义分割和场景理解的准确性和鲁棒性得到了显著改善;同时,强化学习和长短期记忆网络(LSTM)在规划与控制模块中的引入,为优化驾驶路径、避障策略以及动态场景预测提供了全新的解决方案。这种技术结合不仅提高了系统的整体性能,还增强了模块之间的信息流通能力,从而克服了传统模块化设计中割裂优化的问题。
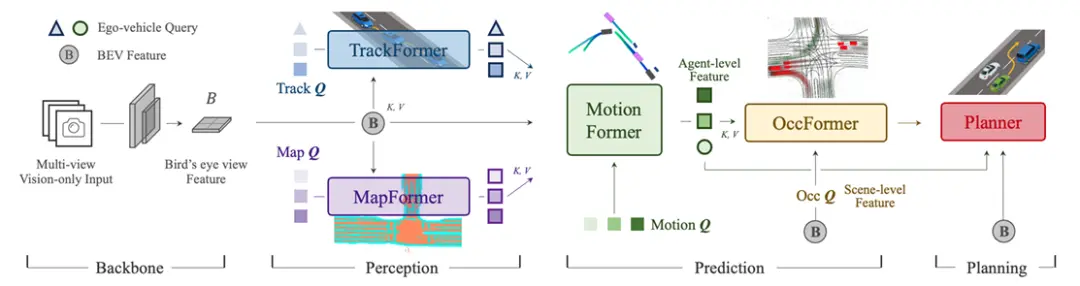
图5 模块化端到端代表——UniAD[2]
当前端到端智驾系统方案的不足
端到端自动驾驶的核心在于通过深度学习模型实现从感知到控制的直接映射,但这一过程受到多重因素的限制。其中,数据驱动方法的瓶颈首先体现在对海量高质量数据的需求上。自动驾驶场景具有高度动态性和多样性,而获取覆盖全面且标注精确的数据不仅成本高昂,还需要高效的数据清洗和自动化标注技术来降低人为干预的不确定性。与此同时,数据分布的偏差与稀有场景的不足使得模型容易在长尾分布场景中失效,这对数据挖掘和扩充技术提出了更高要求。此外,当前的端到端模型大多被视为“黑盒”系统,缺乏可解释性、可调试性和可验证性,难以满足自动驾驶对安全性和可靠性的严格要求。这不仅阻碍了其在高风险场景下的实际部署,也限制了工业界和监管层对其行为透明性的信任。
未来端到端智驾系统方案展望
展望未来,端到端自动驾驶的架构革新可能聚焦于显式和多模态融合方法的深入开发。特别是多源异构传感器的有效整合,将推动从感知到控制的全局优化。基于 BEV 的场景表征方法预计将进一步演进,不仅在 PV(Perspective View,透视视角)和 BEV 之间实现无损、高效的双向映射,还可能通过新的特征提取和对齐方法增强其泛化能力和细节保留。同时,模型结构与接口设计将朝着简化计算复杂度与提升训练效率的方向发展,通过引入分层优化或稀疏注意力机制等技术,逐步减少资源消耗。此外,随着自然语言处理技术的成熟,将语言提示与视觉关系建模相结合的跨模态模型可能成为未来的一大突破方向。这类模型不仅能够赋予自动驾驶系统更高的环境理解能力,还可能通过语言提示实现更自然的人机交互与任务管理。
值此契机,中汽研汽车科技(上海)有限公司紧密贴合新技术发展趋势,进行了端到端技术业务规划。携手企业、高校以及科研机构等多方力量,全面布局标准研究、产业咨询、行业论坛、自动驾驶数据平台建设、大模型智能座舱语料库等业务领域。全力助推中国端到端智能驾驶、智能座舱以及大模型数据等实现跨越式进步与蓬勃发展。
- 下一篇:吉利全新一代域控式热管理集成模块下线
- 上一篇:全固态电池试验线即将投产!



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
