




 广告
广告





















































ENCAP2026对前向碰撞避免的要求③

1.背景&定义&测试设备
2.测试条件
3.测试程序
4.测试执行
5.评估标准和评分
3.测试程序
正式认证时,所有的测试场景都是基于主机厂提交的得分预测GRID随机选择的,测试场景分布与预测得分分布保持一致(红点除外)。
3.1 车辆和摩托车场景
车辆和PTW(摩托车)的标准场景(深灰色)和扩展场景(浅灰色)如下所示:
3.1.1 纵向
3.1.1 Car-to-Car Rear
CCR考虑了三种情况:静止、移动和制动。适用于CCR的碰撞位置如下图所示:
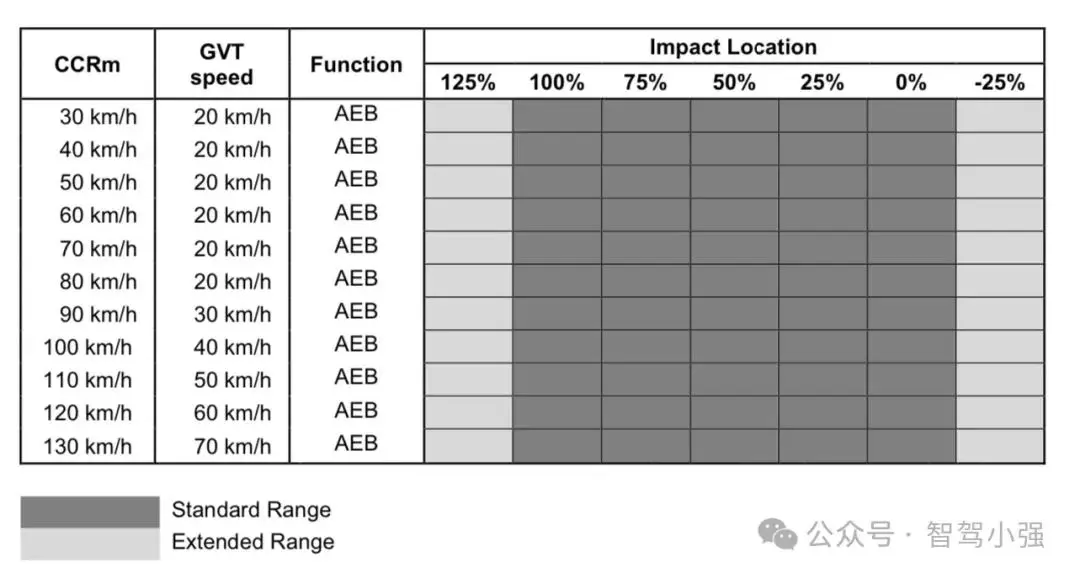
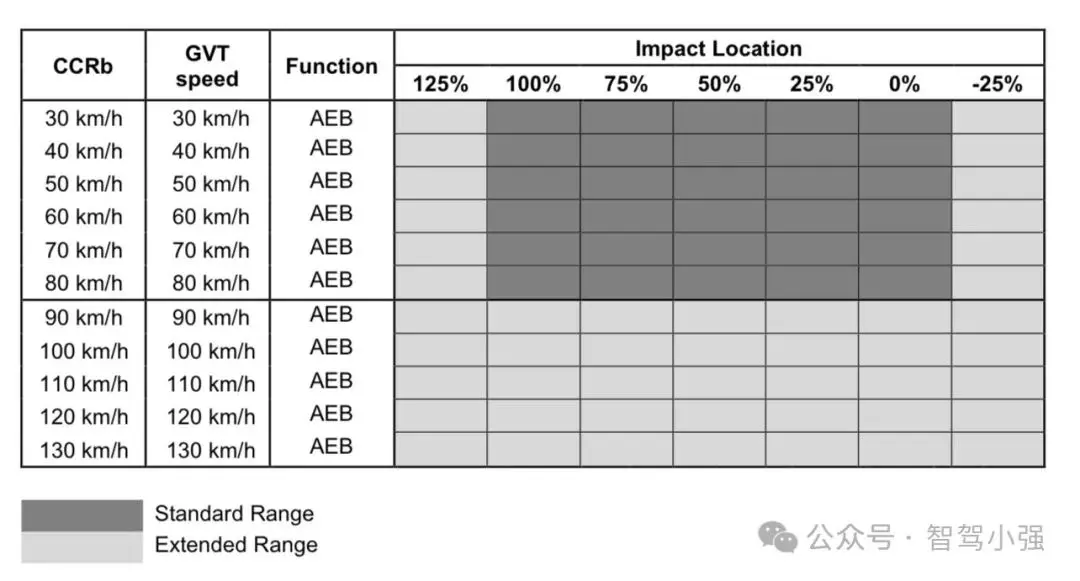
车辆和摩托车最大得分标准场景扩展场景鲁棒性共计Car-to-Car Rear5.20.650.656.5CCRs1.20.150.151.5CCRm2.40.30.33CCRb1.60.20.22
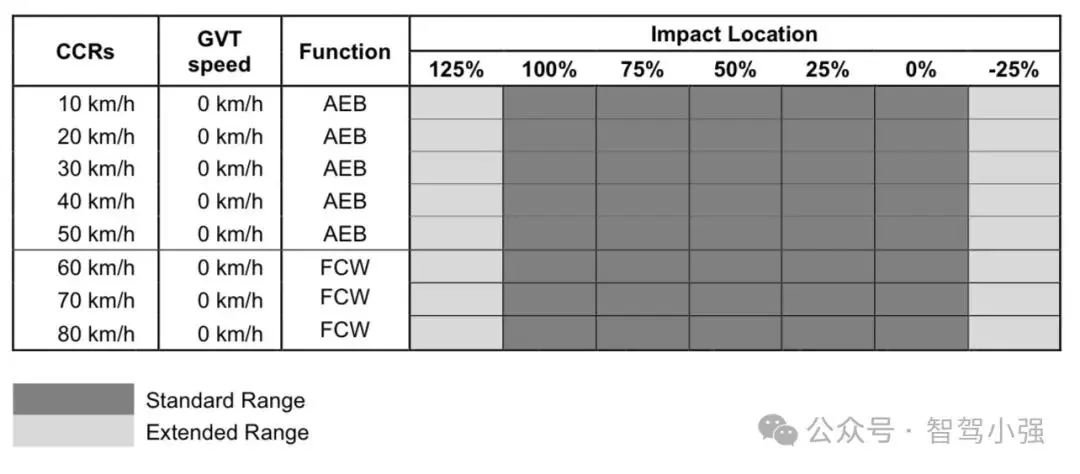
当AEB系统能避撞时,FCW自动得分。
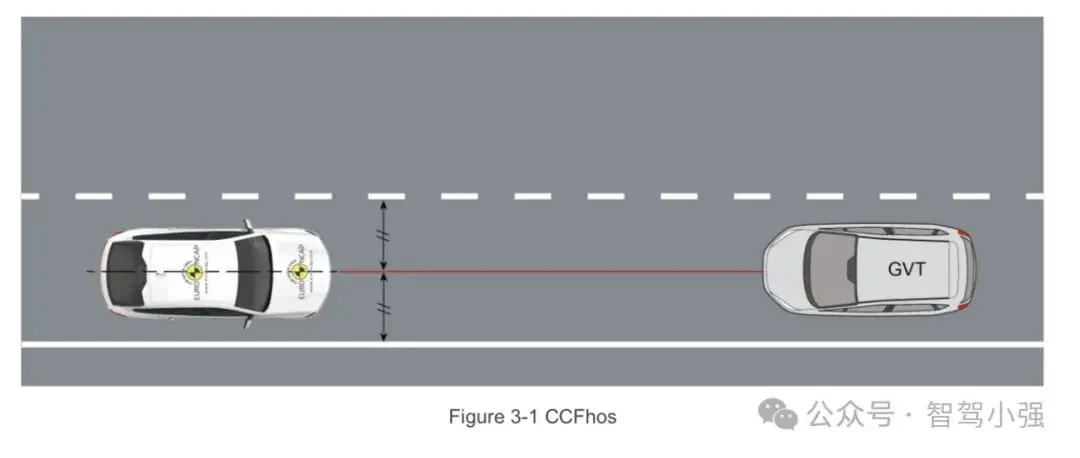
3.1.1.2 Car-to-Car Front
| 车辆和摩托车 | 最大得分 | |||
| 标准场景 | 扩展场景 | 鲁棒性 | 共计 | |
| Car-to-Car Front | 4 | 0.5 | 0.5 | 5 |
| CCFhos | 2 | 0.25 | 0.25 | 2.5 |
| CCFhol | 2 | 0.25 | 0.25 | 2.5 |

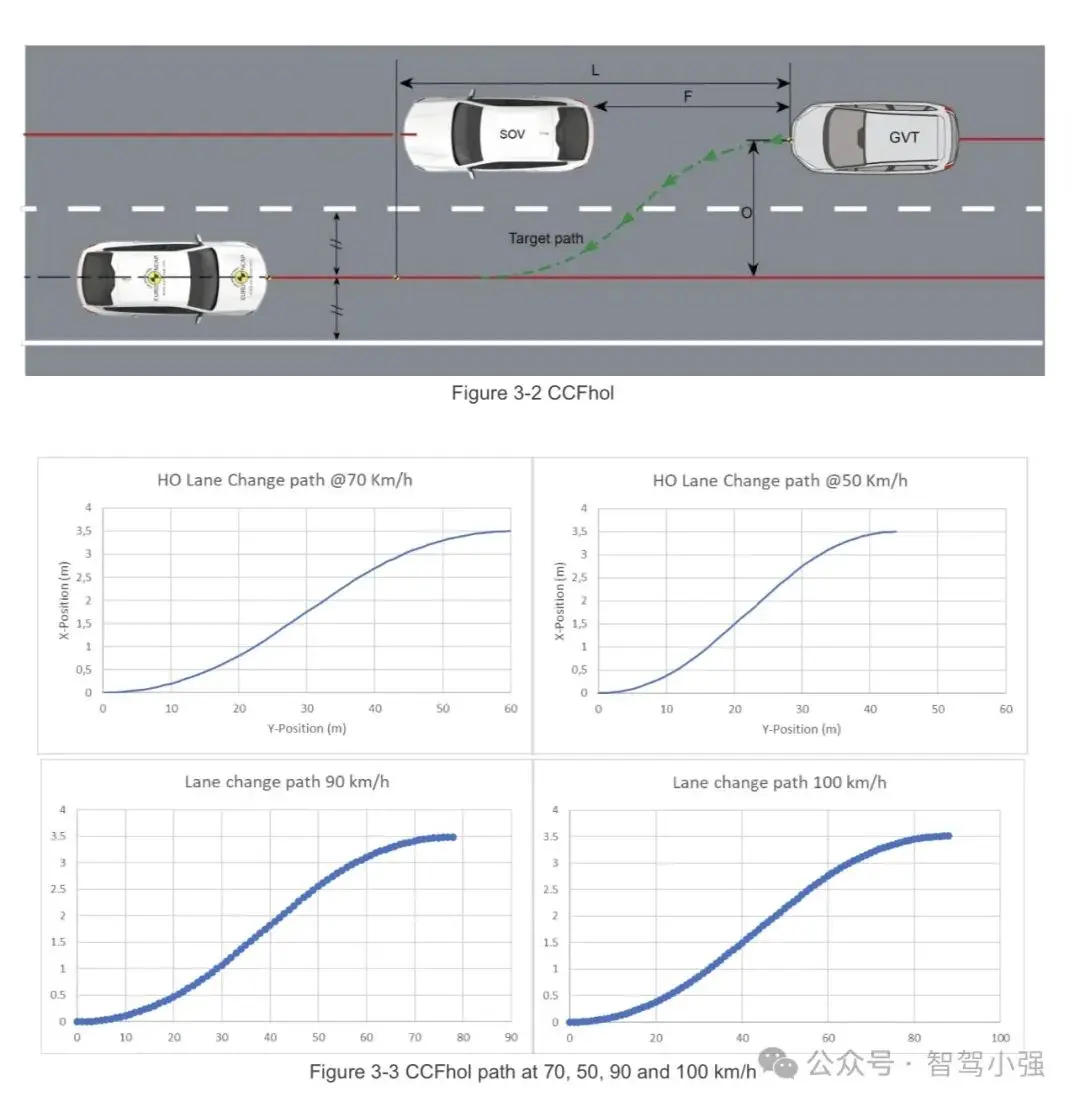 GVT的轨迹参数如图所示:
GVT的轨迹参数如图所示: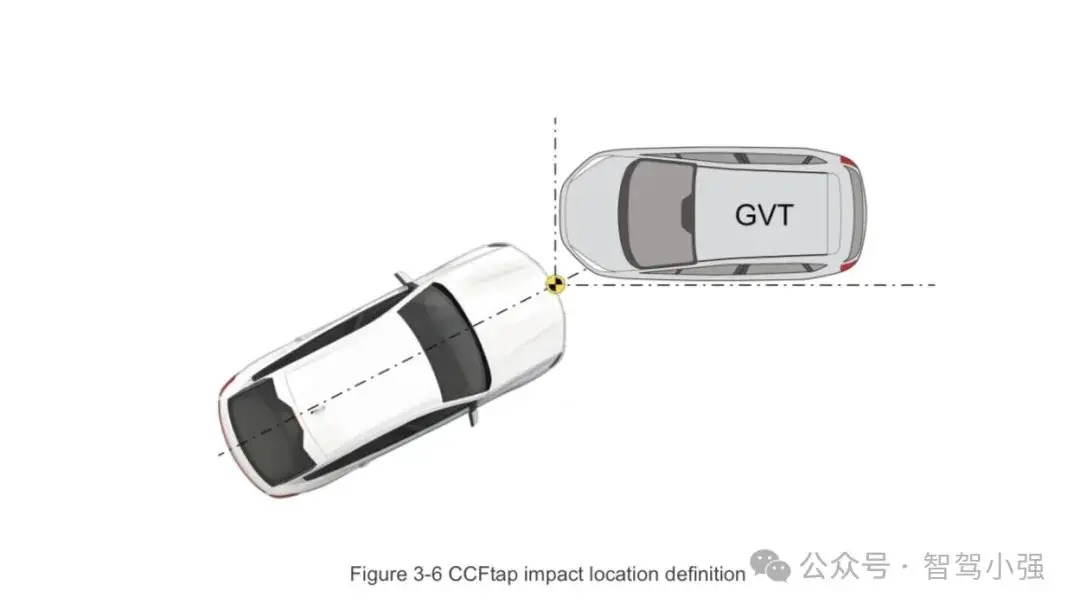
3.1.1.3 Car-to-Motorcyclist Rear
| 车辆和摩托车 | 最大得分 | |||
| 标准场景 | 扩展场景 | 鲁棒性 | 共计 | |
| Car-to-Motorcycle Rear | 2.8 | 0.35 | 0.35 | 3.5 |
| CMRs | 1.2 | 0.15 | 0.15 | 1.5 |
| CMRb | 1.6 | 0.2 | 0.2 | 2 |
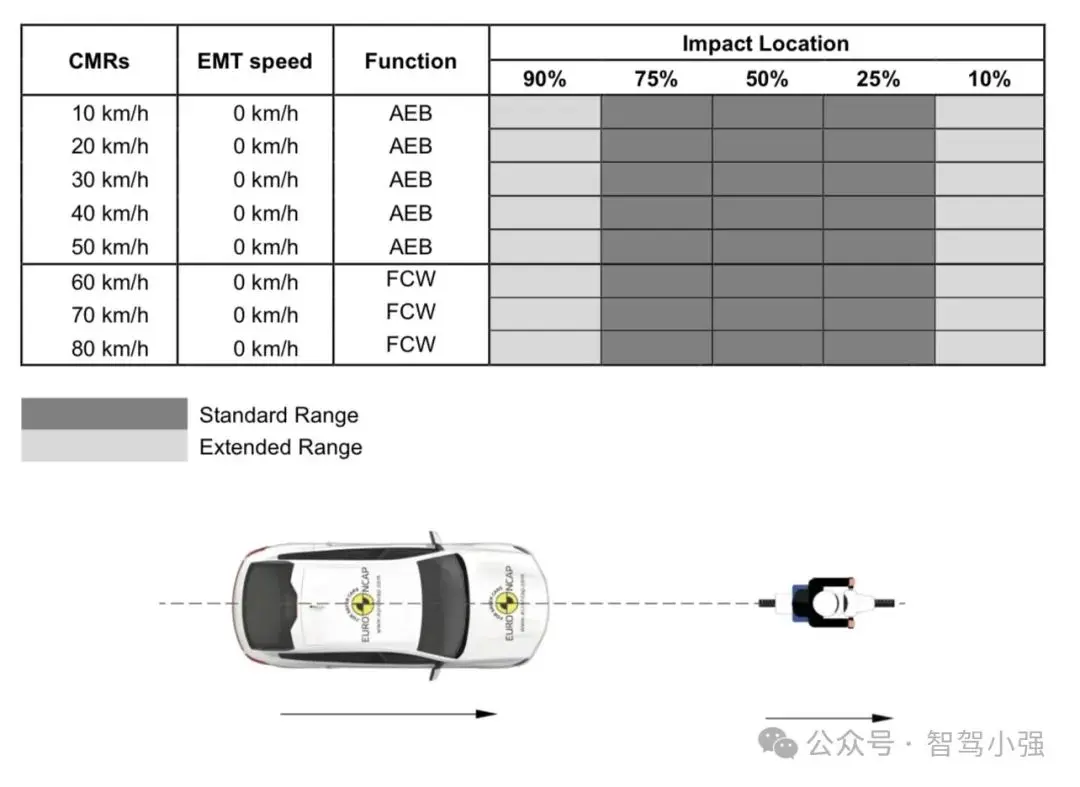 当AEB系统能避撞时,FCW自动得分。
当AEB系统能避撞时,FCW自动得分。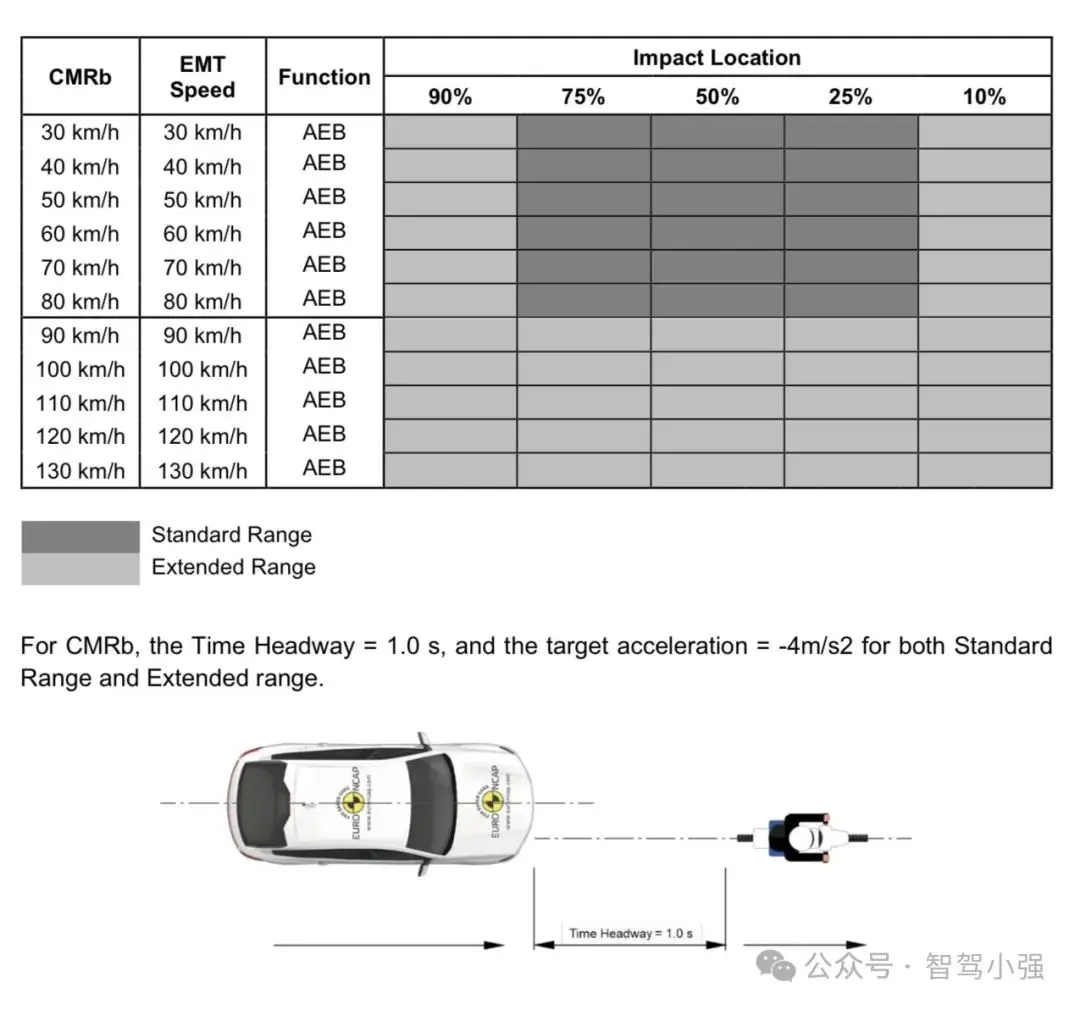 CMRb的标准场景和扩展场景中:VUT和摩托车目标EMT相距时距为1s,即30km/h时相距8.33m,60km/h时相距16.67m,80km/h时相距22.22m。GVT减速度为-4m/s²。鲁棒性测试要对跟车距离的调整、减速度的大小进行测试,详见鲁棒性测试要求。3.1.2 转弯 3.1.2.1 Car-to-Car Turn Across Path
CMRb的标准场景和扩展场景中:VUT和摩托车目标EMT相距时距为1s,即30km/h时相距8.33m,60km/h时相距16.67m,80km/h时相距22.22m。GVT减速度为-4m/s²。鲁棒性测试要对跟车距离的调整、减速度的大小进行测试,详见鲁棒性测试要求。3.1.2 转弯 3.1.2.1 Car-to-Car Turn Across Path
| 车辆和摩托车 | 最大得分 | |||
| 标准场景 | 扩展场景 | 鲁棒性 | 共计 | |
| Car-to-Car | 4 | 0.5 | 0.5 | 5 |
| CCFtap | GVT速度 | |||
| 30 | 45 | 60 | 80 | |
| 10 | ||||
| 15 | ||||
| 20 | ||||
| 25 | ||||
GVT将沿着与VUT初始位置相邻的车道上的一条直线路径行驶,方向与VUT相反。VUT和GVT的直线路径分别距离车道中心虚线的中心1.75米。
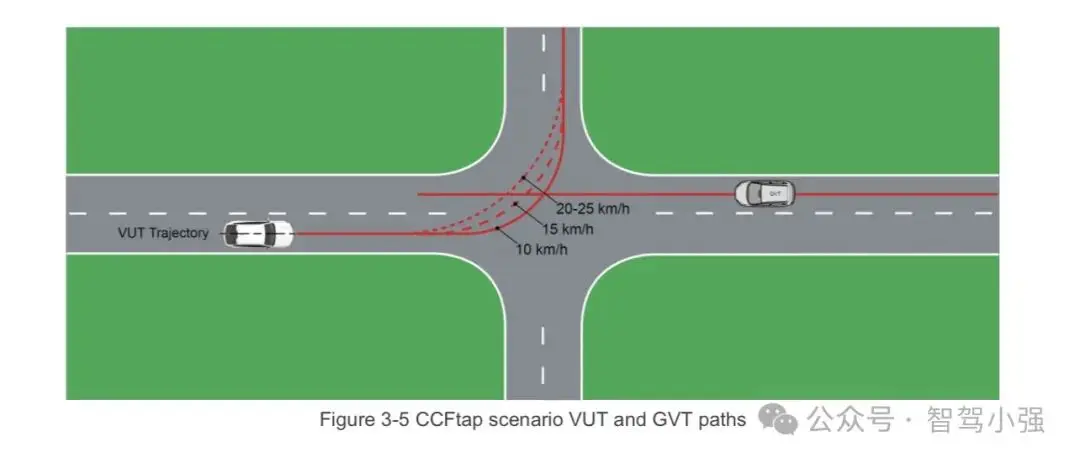 VUT和目标车辆的路径将同步,以便目标的前缘满足VUT宽度的50%的冲击位置(假设没有系统反应)。根据截面确定时,VUT纵向路径误差应在±1.0m以内。 3.1.2.2 Car-to-Motorcyclist Turn Across Path
VUT和目标车辆的路径将同步,以便目标的前缘满足VUT宽度的50%的冲击位置(假设没有系统反应)。根据截面确定时,VUT纵向路径误差应在±1.0m以内。 3.1.2.2 Car-to-Motorcyclist Turn Across Path
| 车辆和摩托车 | 最大得分 | |||
| 标准场景 | 扩展场景 | 鲁棒性 | 共计 | |
| Car-to-Motorcycle | 4 | 0.5 | 0.5 | 5 |
| CMFtap | EMT速度 | |||
| 30 | 45 | 60 | 80 | |
| 10 | ||||
| 15 | ||||
| 20 | ||||
| 25 | ||||
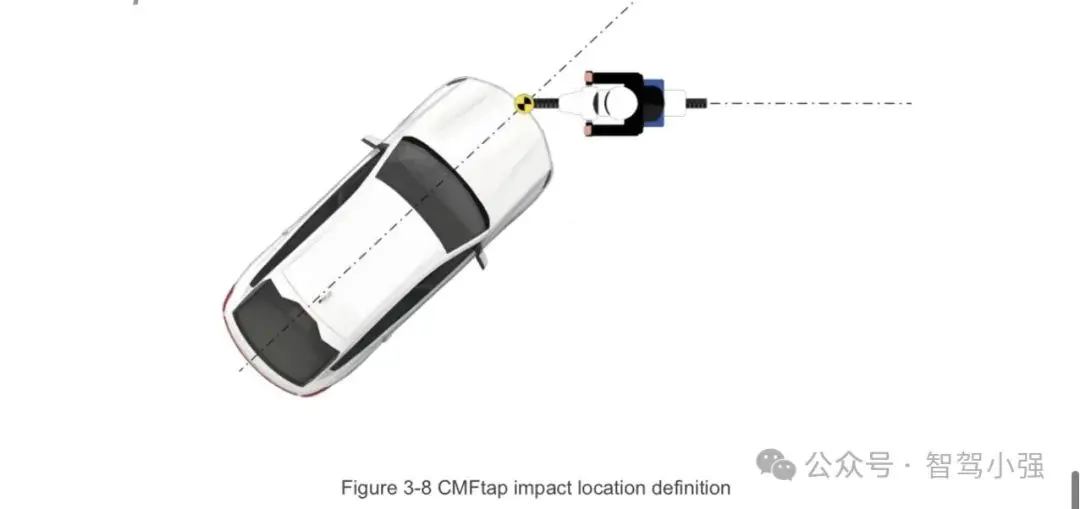 VUT和目标车辆的路径将同步,以便目标的前缘满足VUT宽度的50%的冲击位置(假设没有系统反应)。根据截面确定时,VUT纵向路径误差应在±1.0m以内。3.1.3 横穿 3.1.3.1 Car-to-Car Crossing
VUT和目标车辆的路径将同步,以便目标的前缘满足VUT宽度的50%的冲击位置(假设没有系统反应)。根据截面确定时,VUT纵向路径误差应在±1.0m以内。3.1.3 横穿 3.1.3.1 Car-to-Car Crossing
| 车辆和摩托车 | 最大得分 | |||
| 标准场景 | 扩展场景 | 鲁棒性 | 共计 | |
| Car-to-Car | 6 | 0.75 | 0.75 | 7.5 |
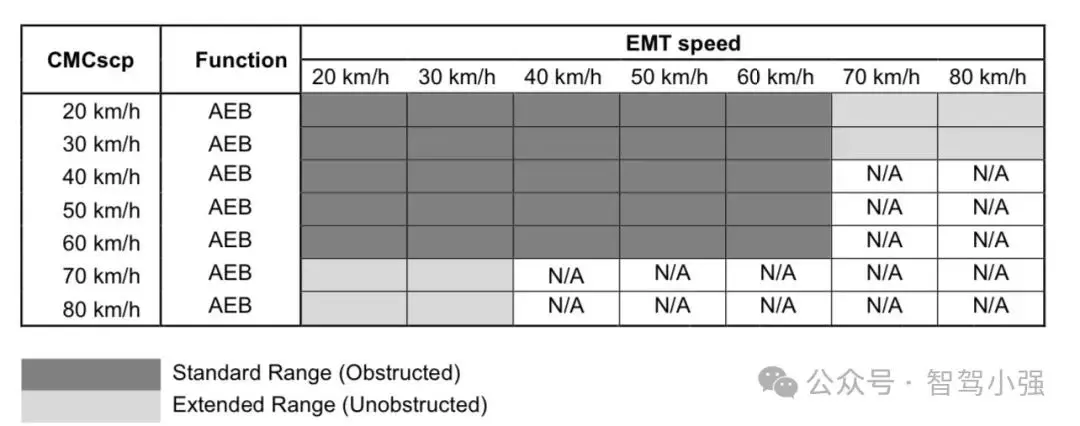
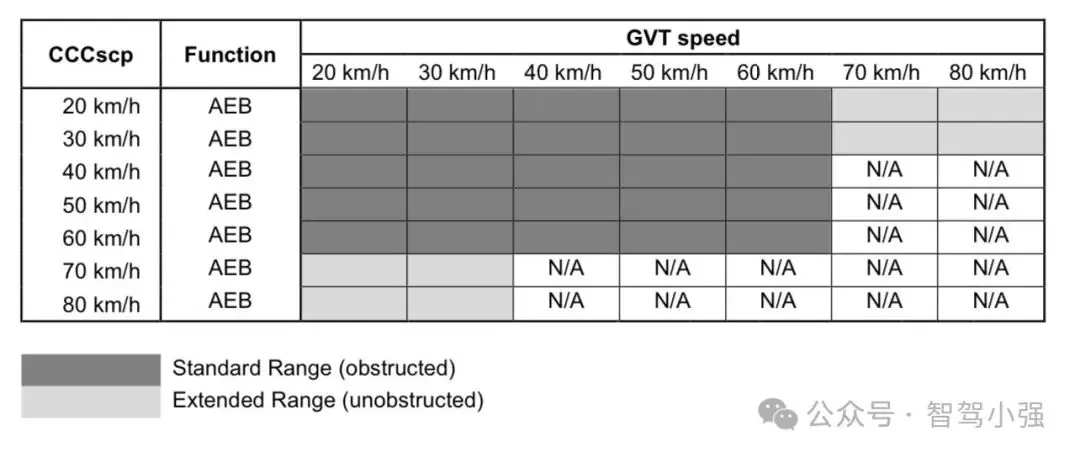 标准场景有遮挡,扩展场景无遮挡。 障碍物由3辆车沿着VUT轨迹停在两侧,要么停在远侧(当目标从远侧接近时),要么停在近侧(当目标从近侧接近时)。离十字路口最近的车辆是一辆大型遮挡车辆,其次是一辆小型遮挡车辆,最后是测试实验室场所的任何车辆。
标准场景有遮挡,扩展场景无遮挡。 障碍物由3辆车沿着VUT轨迹停在两侧,要么停在远侧(当目标从远侧接近时),要么停在近侧(当目标从近侧接近时)。离十字路口最近的车辆是一辆大型遮挡车辆,其次是一辆小型遮挡车辆,最后是测试实验室场所的任何车辆。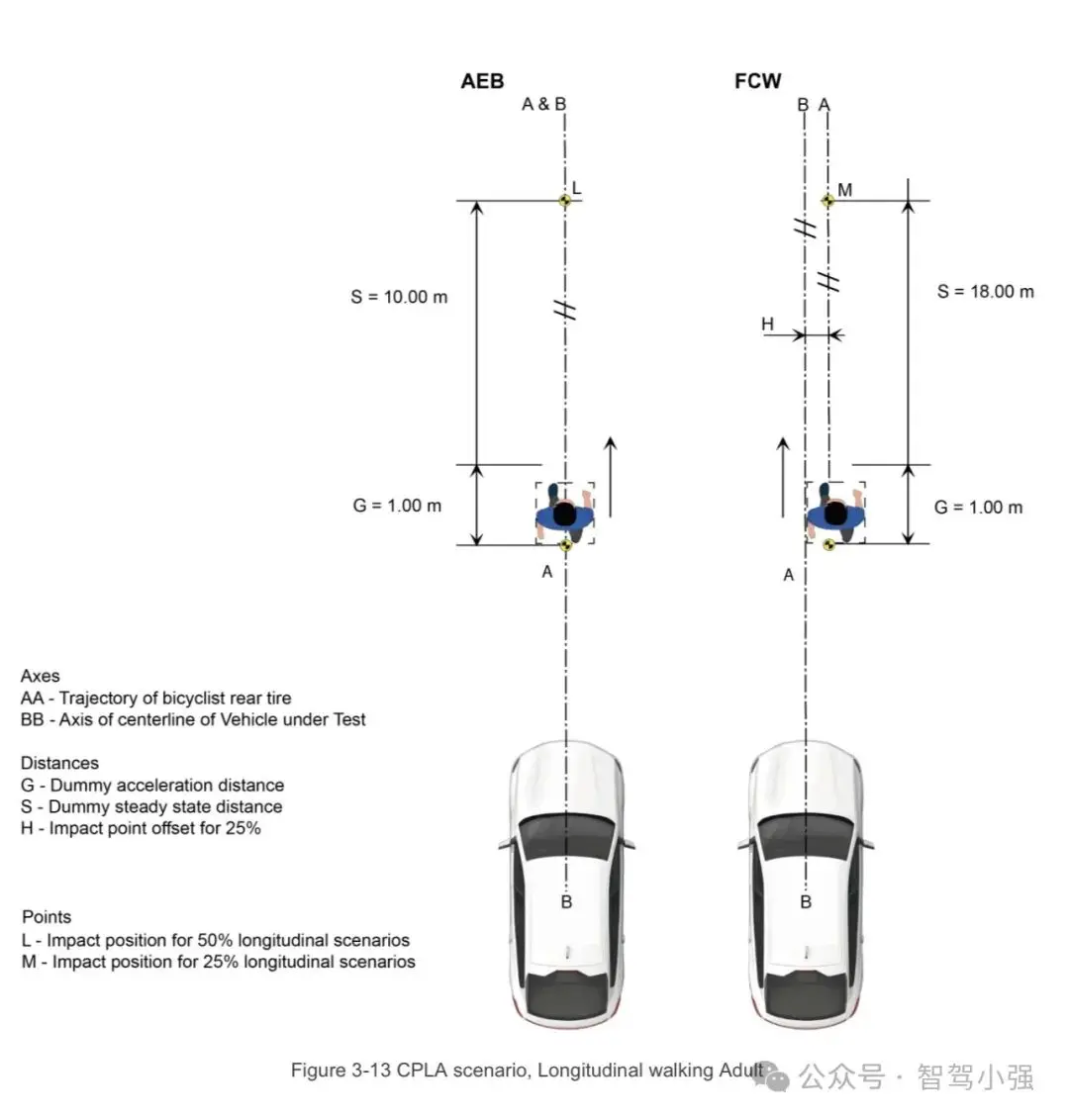
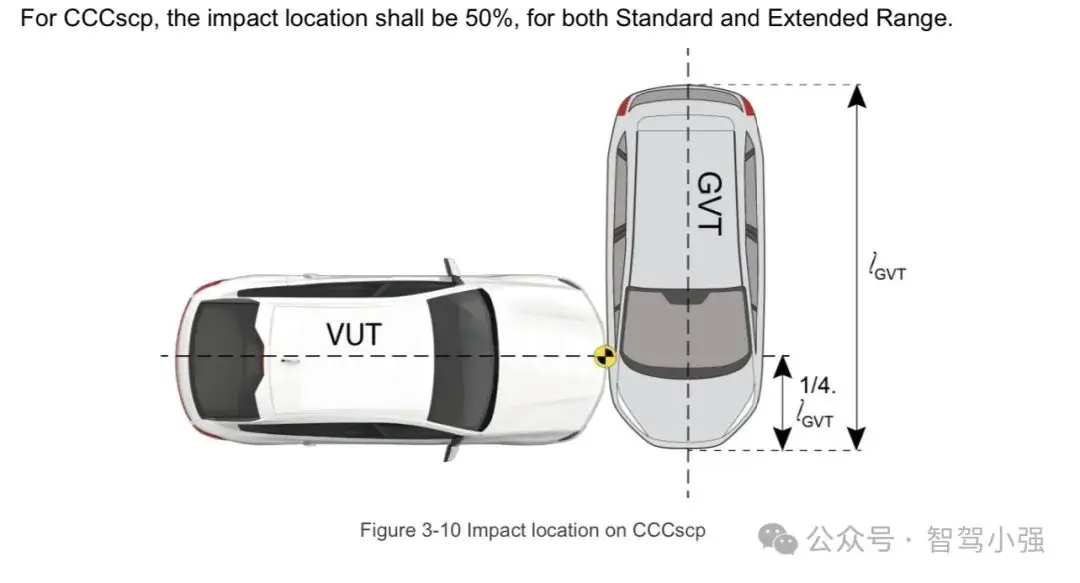 CCCscp场景中,标准场景和扩展场景中的碰撞点都是50%。 3.1.3.2 Car-to-Motorcyclist Crossing
CCCscp场景中,标准场景和扩展场景中的碰撞点都是50%。 3.1.3.2 Car-to-Motorcyclist Crossing
| 车辆和摩托车 | 最大得分 | |||
| 标准场景 | 扩展场景 | 鲁棒性 | 共计 | |
| Car-to-Motorcycle | 6 | 0.75 | 0.75 | 7.5 |
 标准场景有遮挡,扩展场景无遮挡。 障碍物由3辆车沿着VUT轨迹停在两侧,要么停在远侧(当目标从远侧接近时),要么停在近侧(当目标从近侧接近时)。离十字路口最近的车辆是一辆大型遮挡车辆,其次是一辆小型遮挡车辆,最后是测试实验室场所的任何车辆。
标准场景有遮挡,扩展场景无遮挡。 障碍物由3辆车沿着VUT轨迹停在两侧,要么停在远侧(当目标从远侧接近时),要么停在近侧(当目标从近侧接近时)。离十字路口最近的车辆是一辆大型遮挡车辆,其次是一辆小型遮挡车辆,最后是测试实验室场所的任何车辆。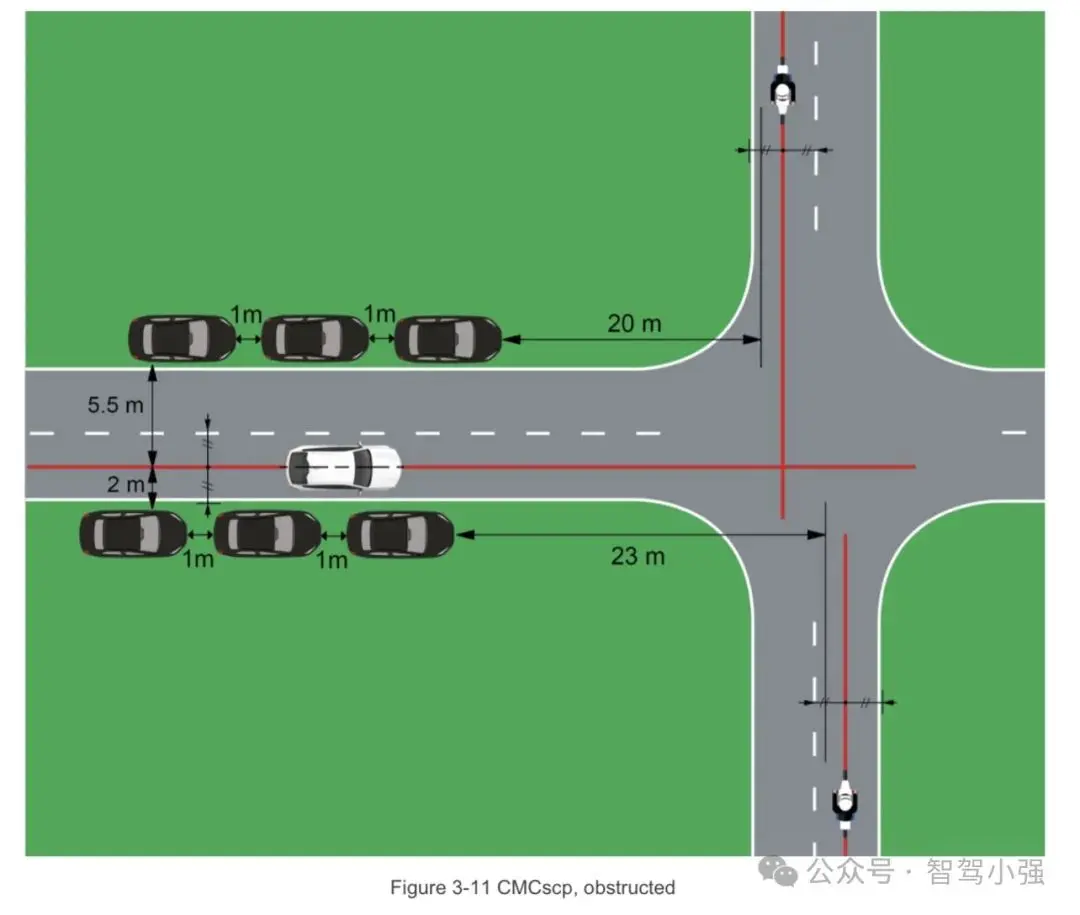 CMCscp标准场景和扩展场景中:远端场景碰撞位置为100%;近端场景碰撞位置为0%。即碰撞位置为摩托车碰撞点刚与VUT重合。
CMCscp标准场景和扩展场景中:远端场景碰撞位置为100%;近端场景碰撞位置为0%。即碰撞位置为摩托车碰撞点刚与VUT重合。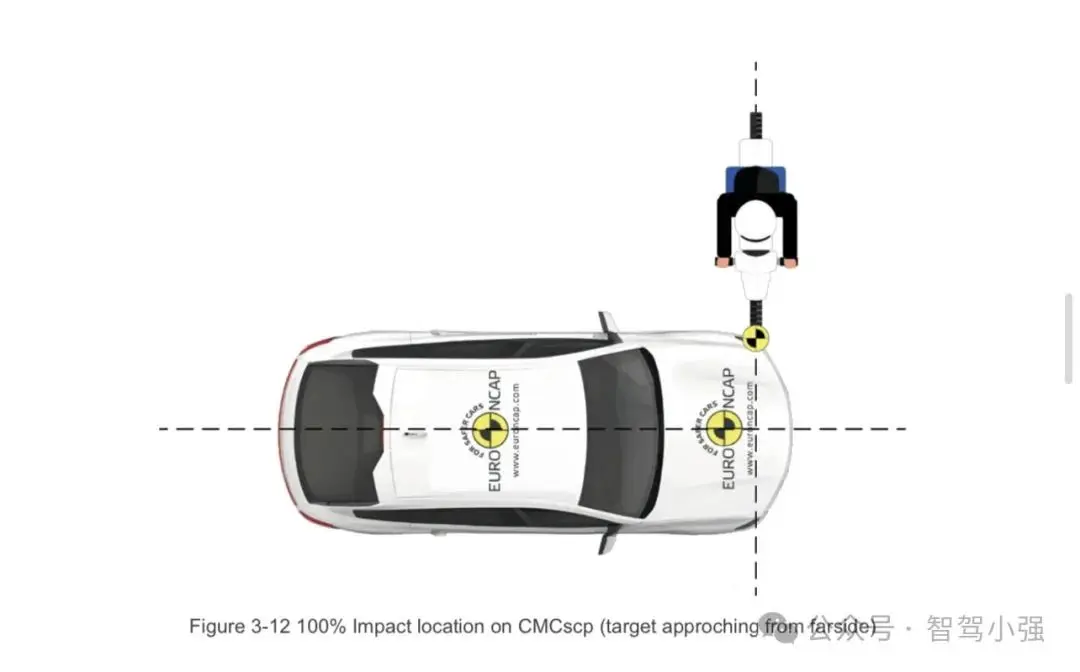 3.2 行人和自行车场景
3.2 行人和自行车场景
行人和自行车的标准场景(深灰色)和扩展场景(浅灰色)如下所示:
3.2 纵向
3.2.1 Car-to-Pedestrian Longitudinal
| 行人和自行车 | 最大得分 | |||
| 标准场景 | 扩展场景 | 鲁棒性 | 共计 | |
| 车对人纵向 | 2 | 0.25 | 0.25 | 2.5 |
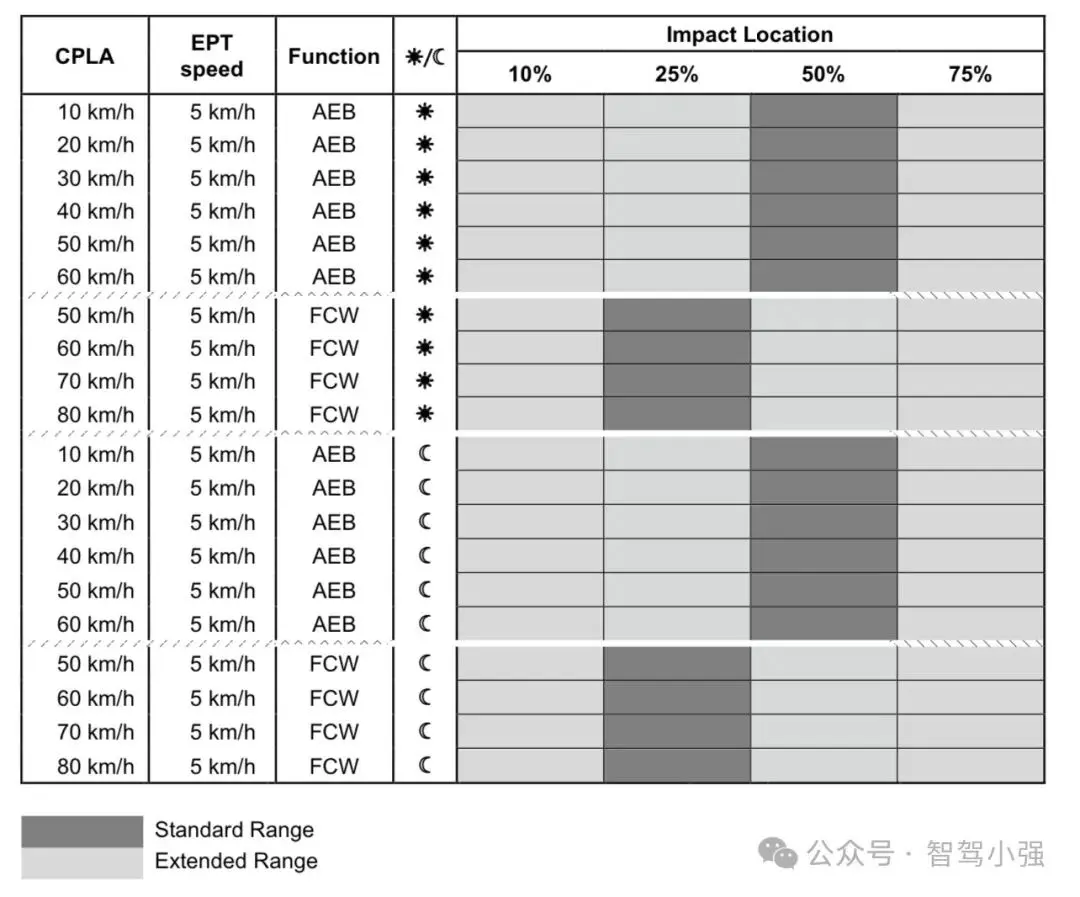
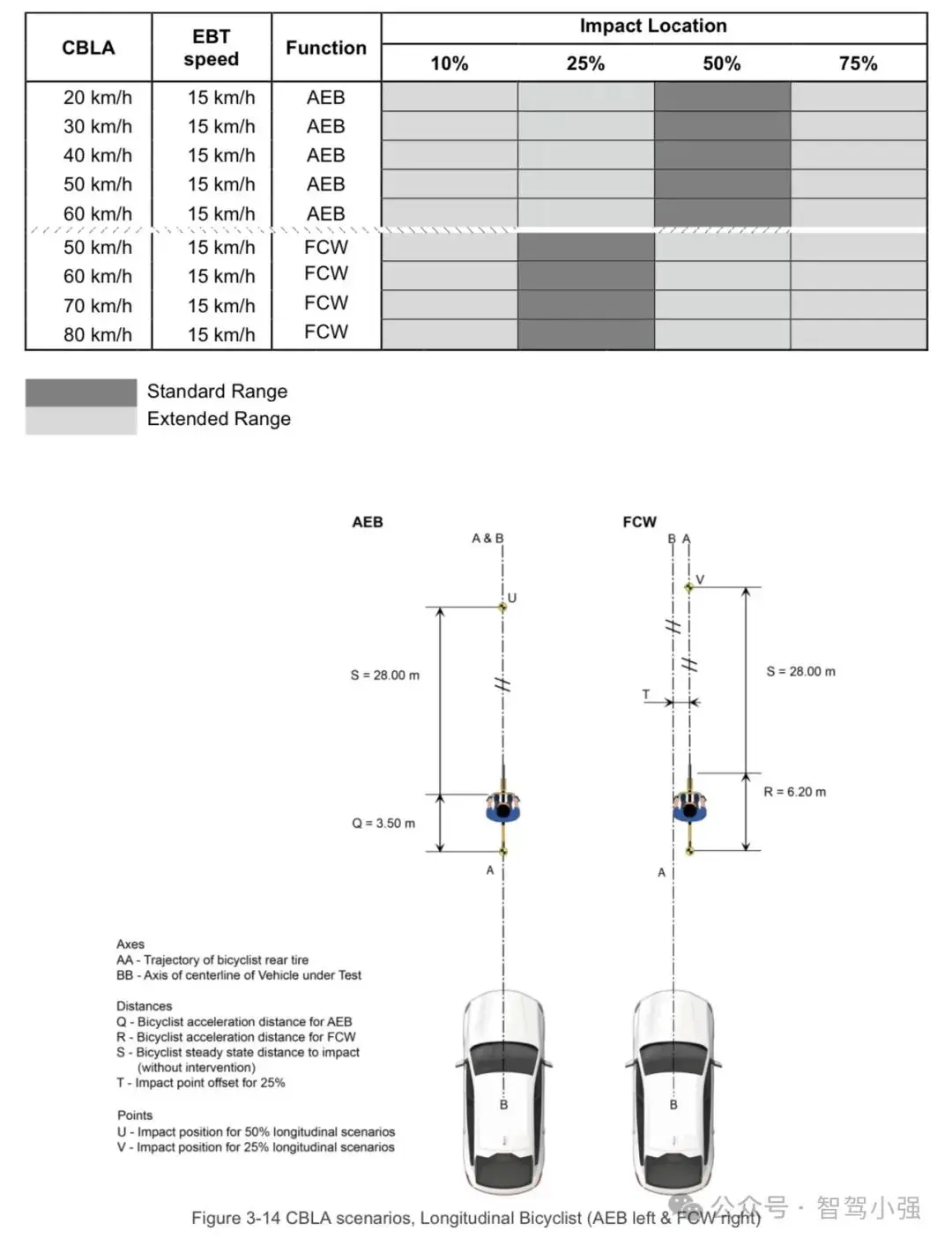
3.2.1.2 Car-to-Bicyclist Longitudinal
| 行人和自行车 | 最大得分 | |||
| 标准场景 | 扩展场景 | 鲁棒性 | 共计 | |
| 车对自行车纵向 | 2 | 0.25 | 0.25 | 2.5 |
 3.2.2 转弯
3.2.2 转弯
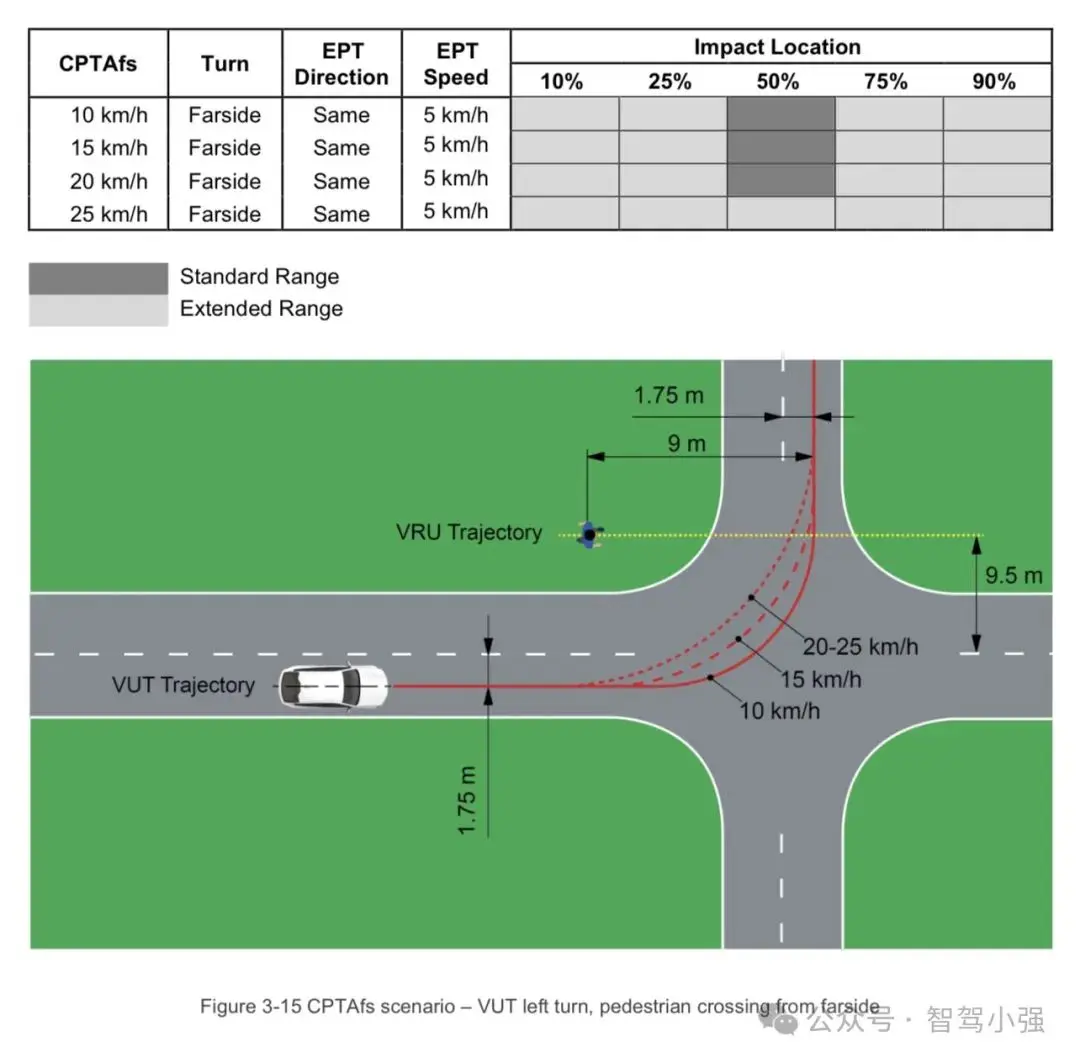
3.2.2.1 Car-to-Pedestrian Turning
| 行人和自行车 | 最大得分 | |||
| 标准场景 | 扩展场景 | 鲁棒性 | 共计 | |
| 车对人转弯 | 2 | 0.25 | 0.25 | 2.5 |
CPTAfo:左转弯,目标对向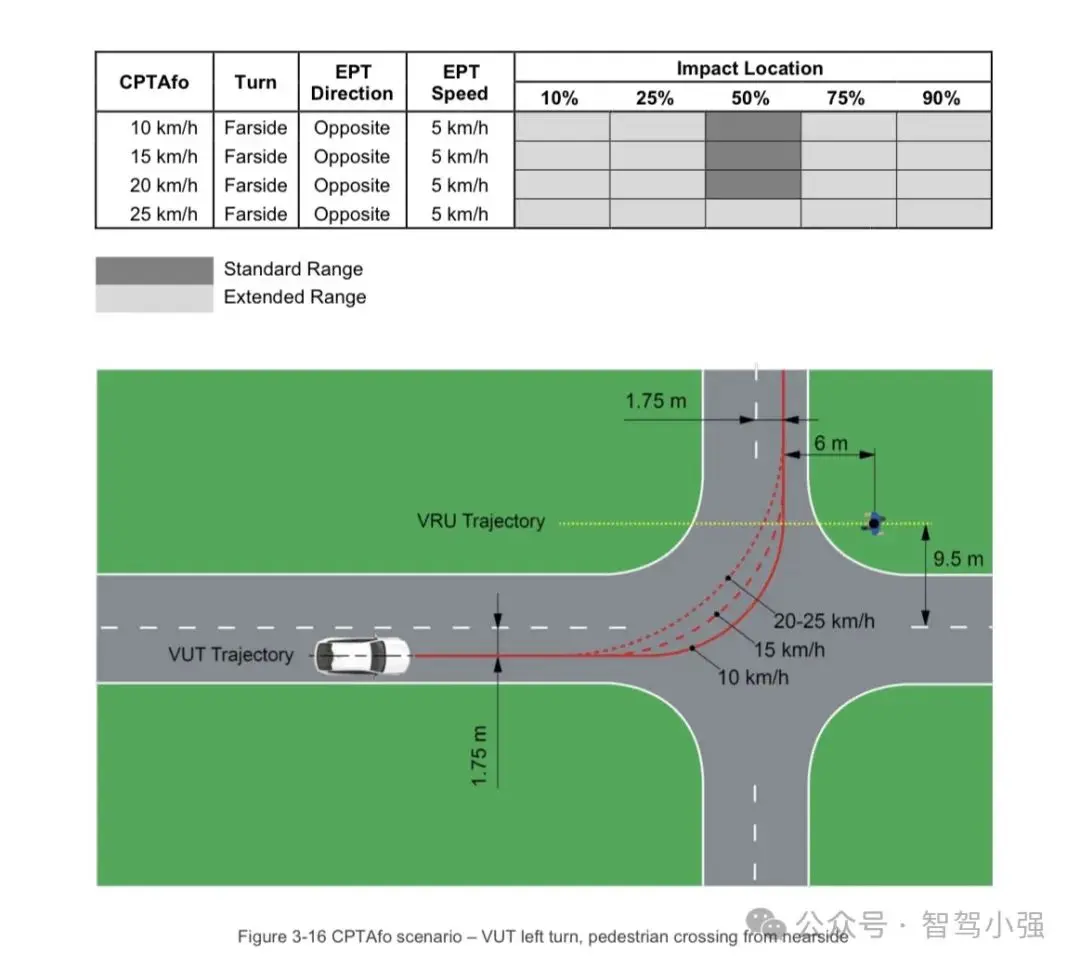 CPTAns:右转弯,目标同向
CPTAns:右转弯,目标同向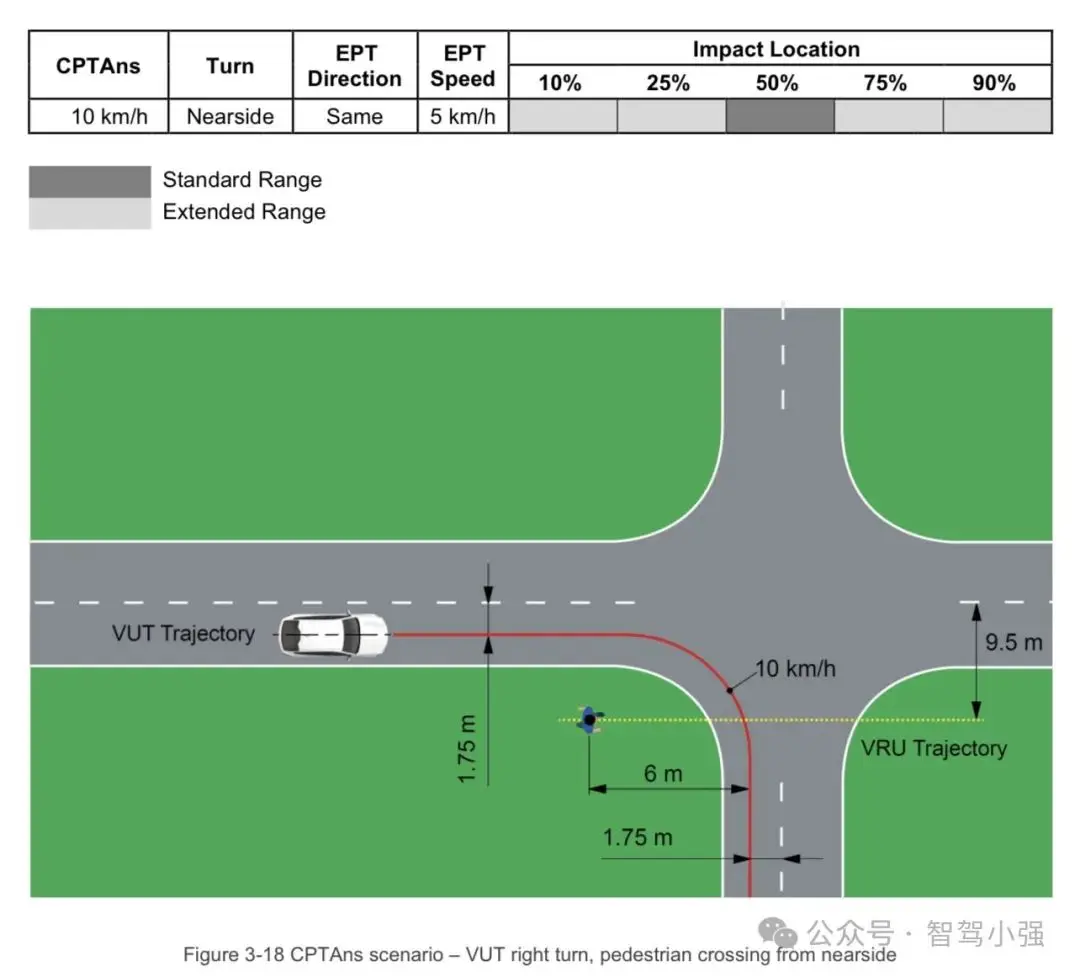 CPTAno:右转弯,目标对向
CPTAno:右转弯,目标对向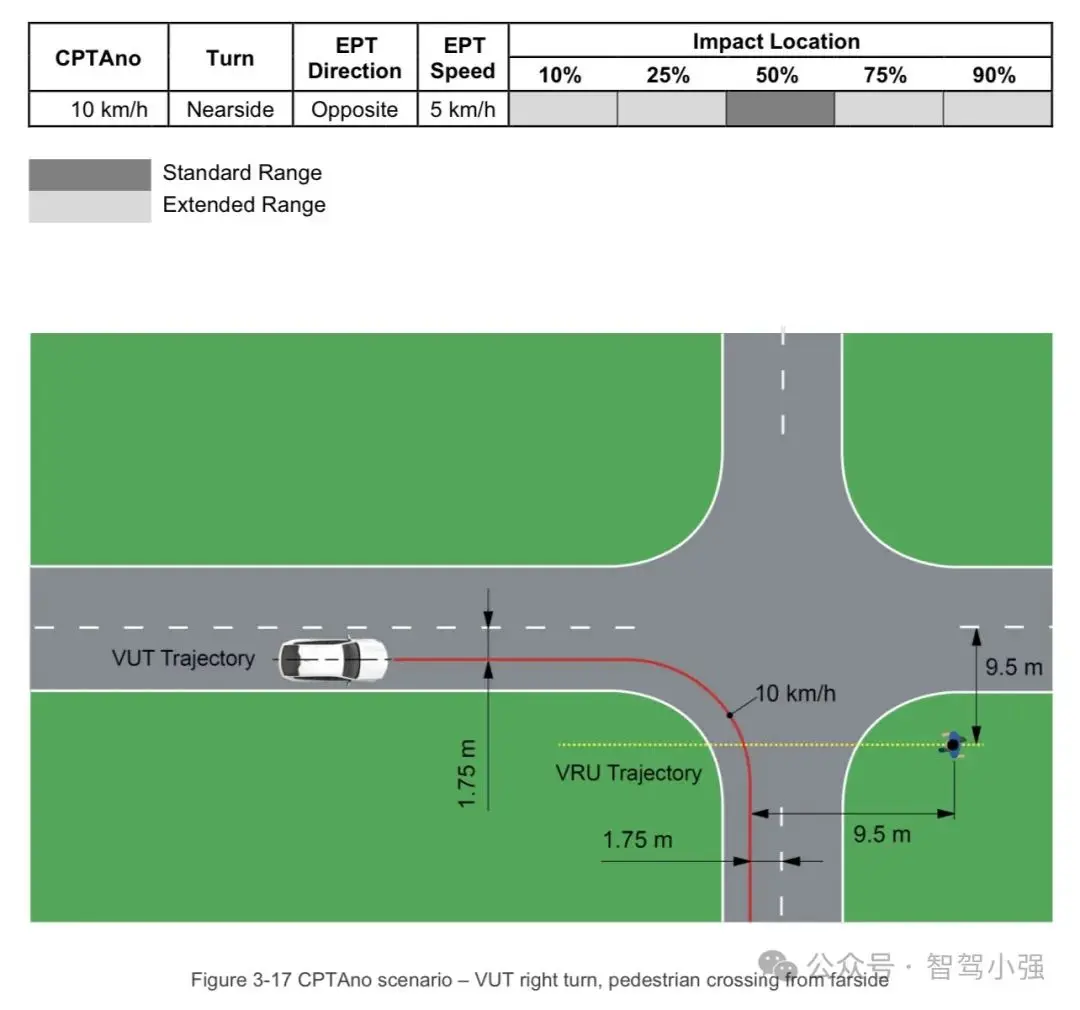 主驾侧为远端,副驾侧为近端。针对左舵车,远端即左转弯,近端即右转弯。 作为扩展场景的一部分,25km/h的转弯在20km/h的路径上。
主驾侧为远端,副驾侧为近端。针对左舵车,远端即左转弯,近端即右转弯。 作为扩展场景的一部分,25km/h的转弯在20km/h的路径上。
3.2.2.2 Car-to-Bicyclist Turning
| 行人和自行车 | 最大得分 | |||
| 标准场景 | 扩展场景 | 鲁棒性 | 共计 | |
| 车对自行车转向 | 2 | 0.25 | 0.25 | 2.5 |
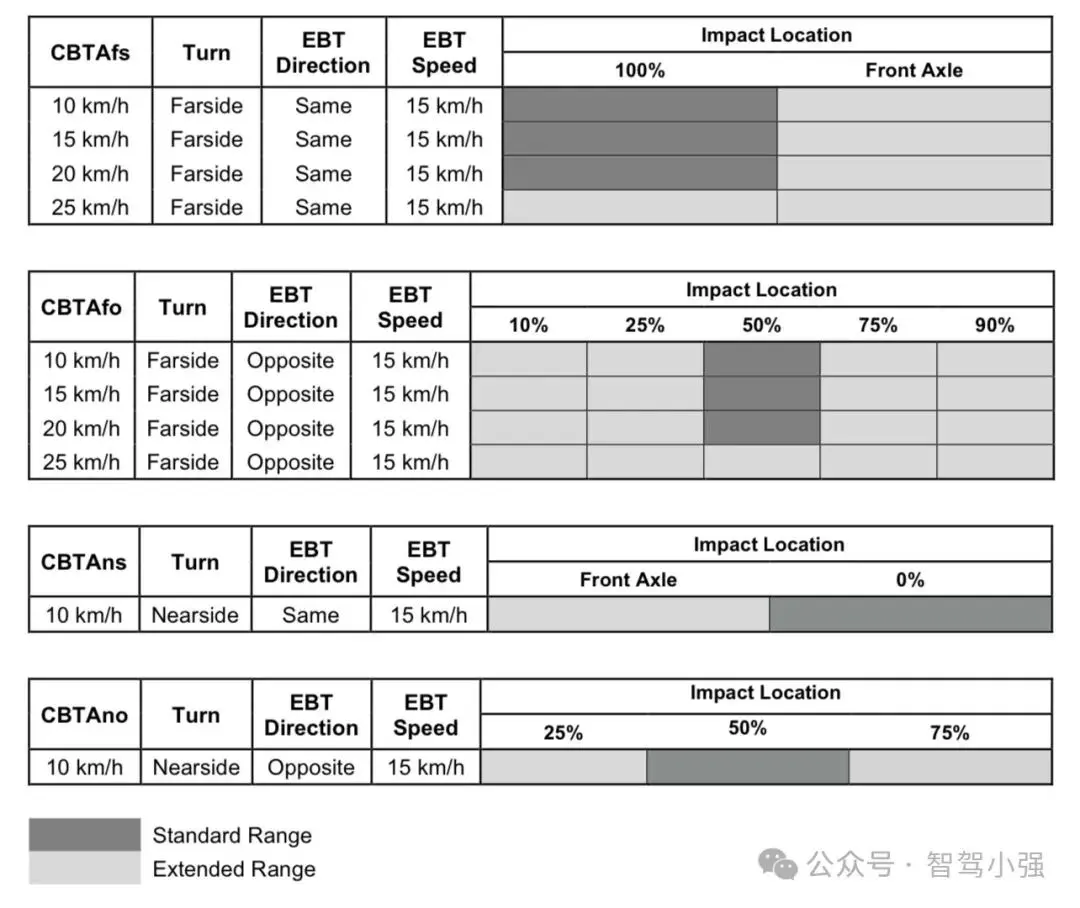 CBTA包含4个子场景: CBTAfs:左转弯,目标同向 CBTAfo:左转弯,目标对向 CBTAns:右转弯,目标同向 CBTAno:右转弯,目标对向 在所有的场景中,目标速度都是15km/h。 作为扩展场景的一部分,25km/h的转弯在20km/h的路径上。
CBTA包含4个子场景: CBTAfs:左转弯,目标同向 CBTAfo:左转弯,目标对向 CBTAns:右转弯,目标同向 CBTAno:右转弯,目标对向 在所有的场景中,目标速度都是15km/h。 作为扩展场景的一部分,25km/h的转弯在20km/h的路径上。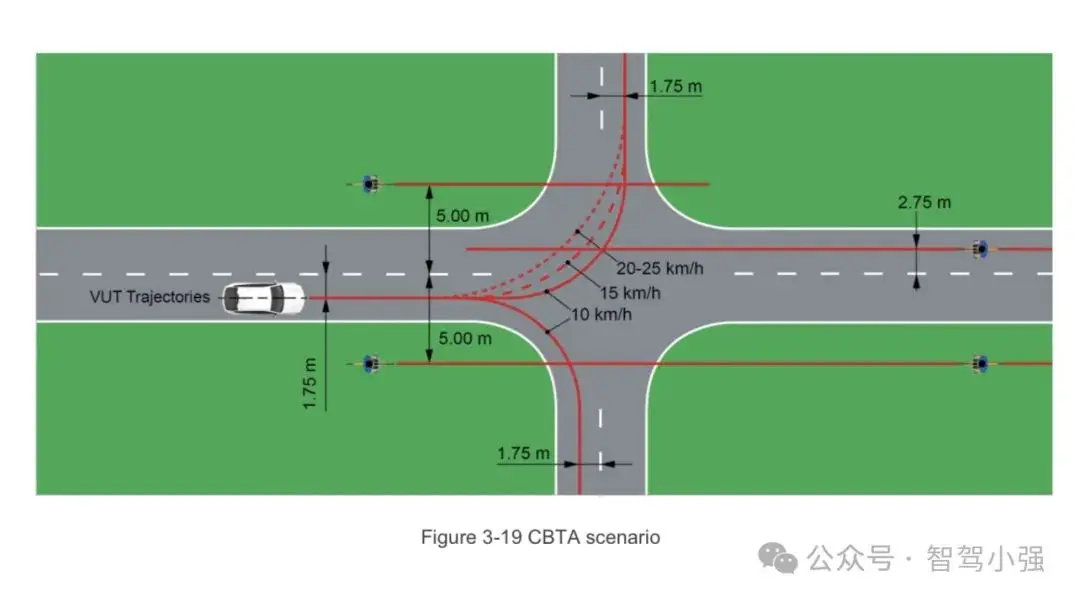 主驾侧为远端,副驾侧为近端。针对左舵车,远端即左转弯,近端即右转弯。3.2.3 横穿
主驾侧为远端,副驾侧为近端。针对左舵车,远端即左转弯,近端即右转弯。3.2.3 横穿
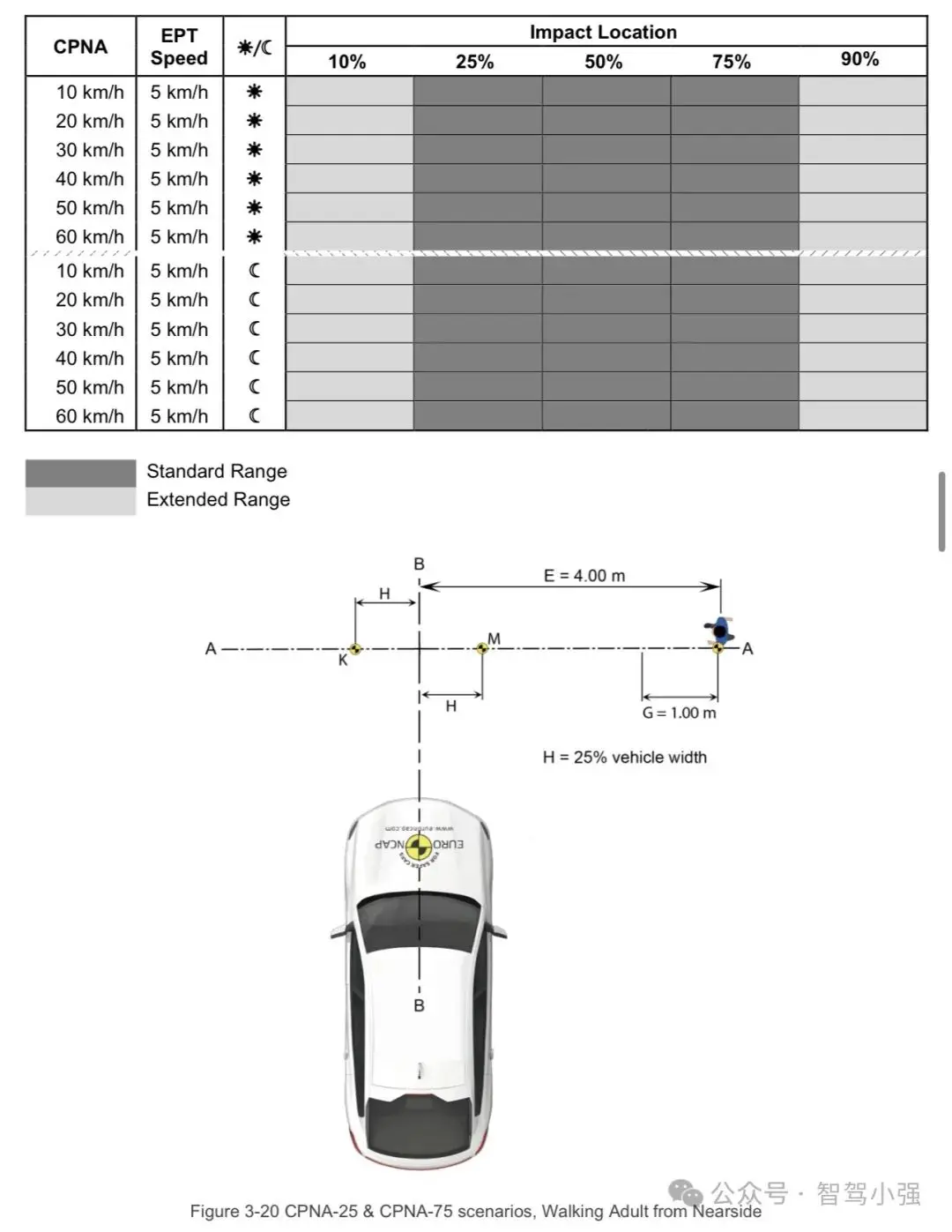
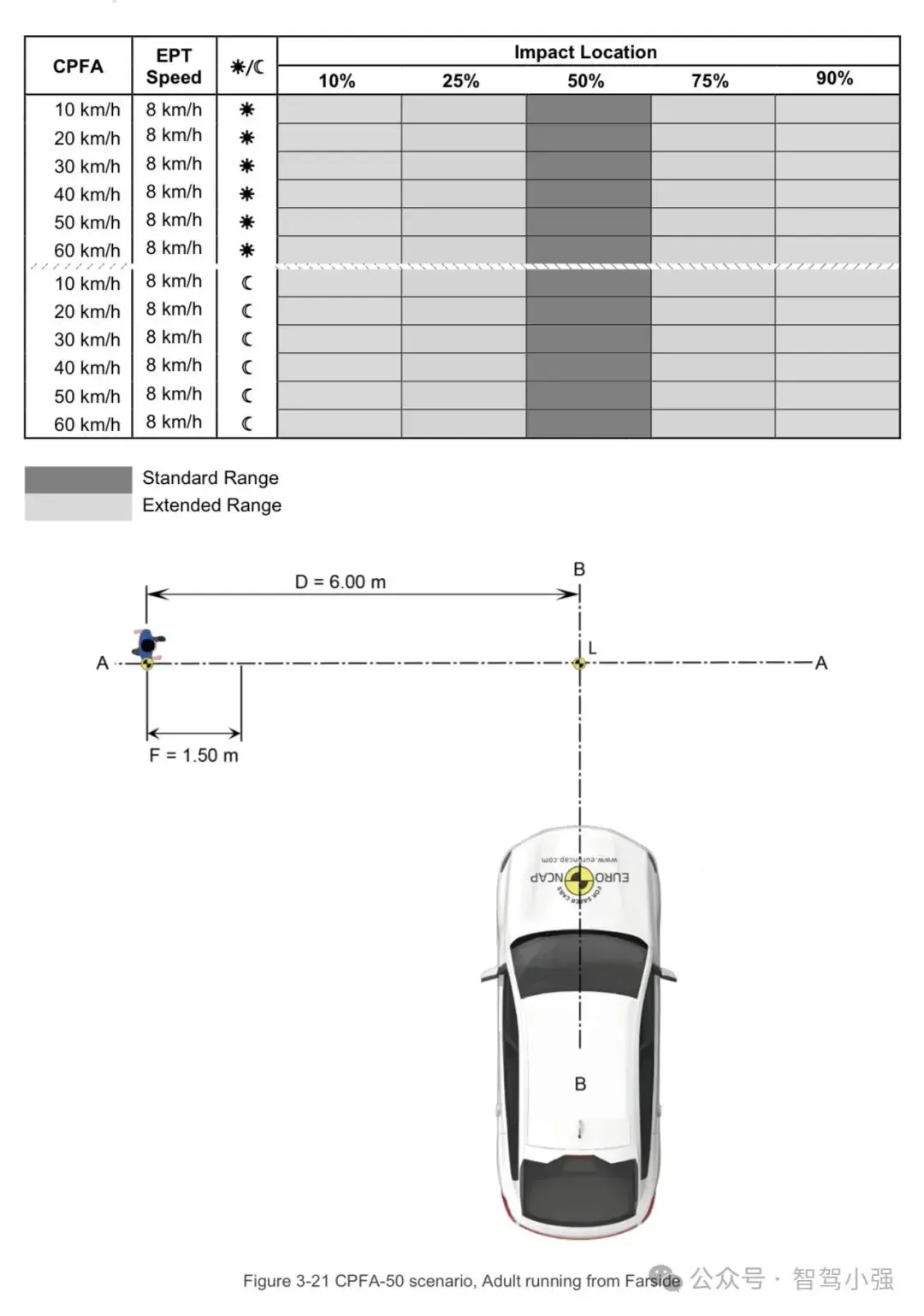
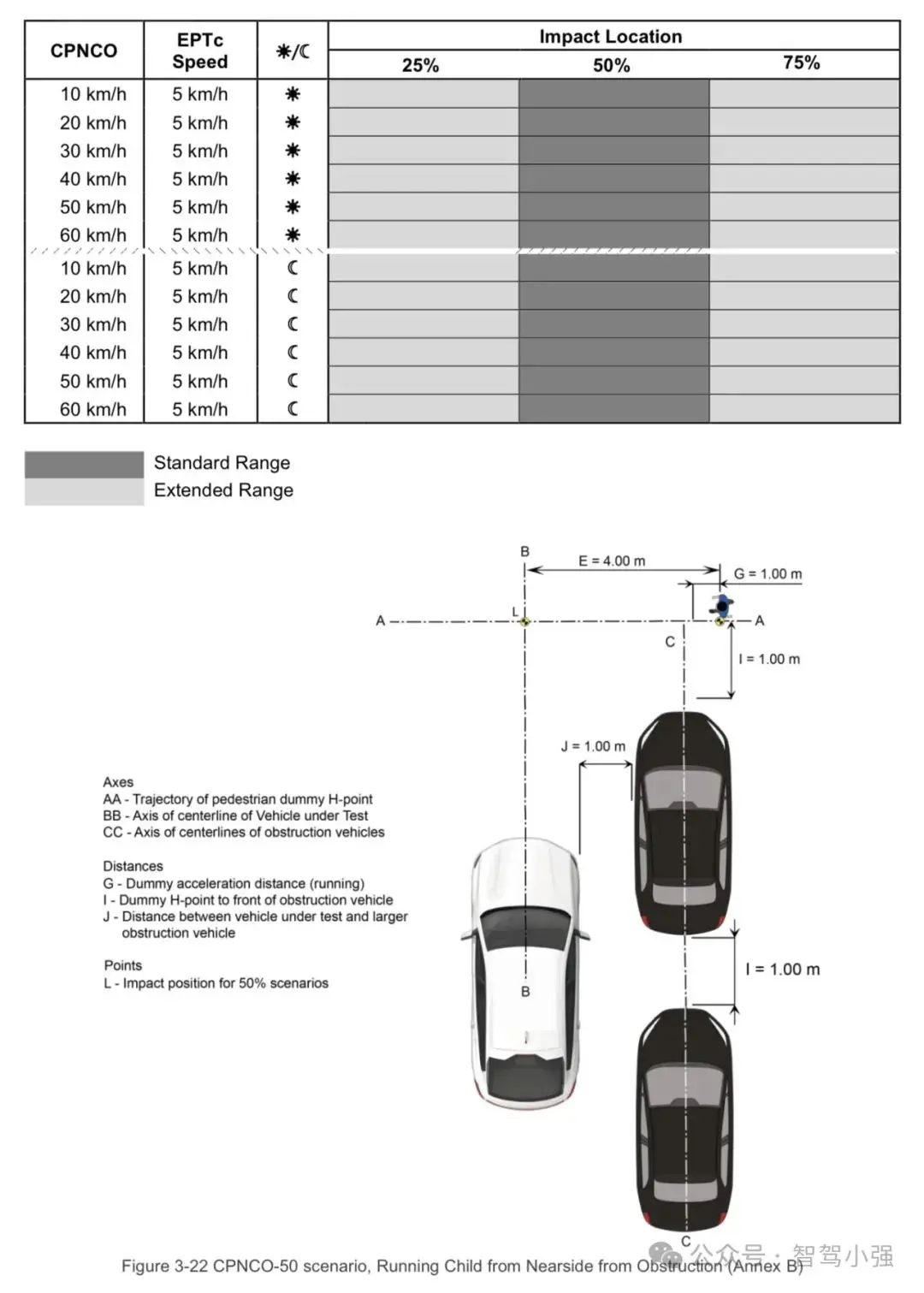
3.2.3.1 Car-to-Pedestrian Crossing
| 行人和自行车 | 最大得分 | |||
| 标准场景 | 扩展场景 | 鲁棒性 | 共计 | |
| 车对人横穿 | 4 | 0.5 | 0.5 | 5 |
| CPNA | 1 | 0.125 | 0.125 | 1.25 |
| CPFA | 1 | 0.125 | 0.125 | 1.25 |
| CPNCO | 2 | 0.25 | 0.25 | 2.5 |
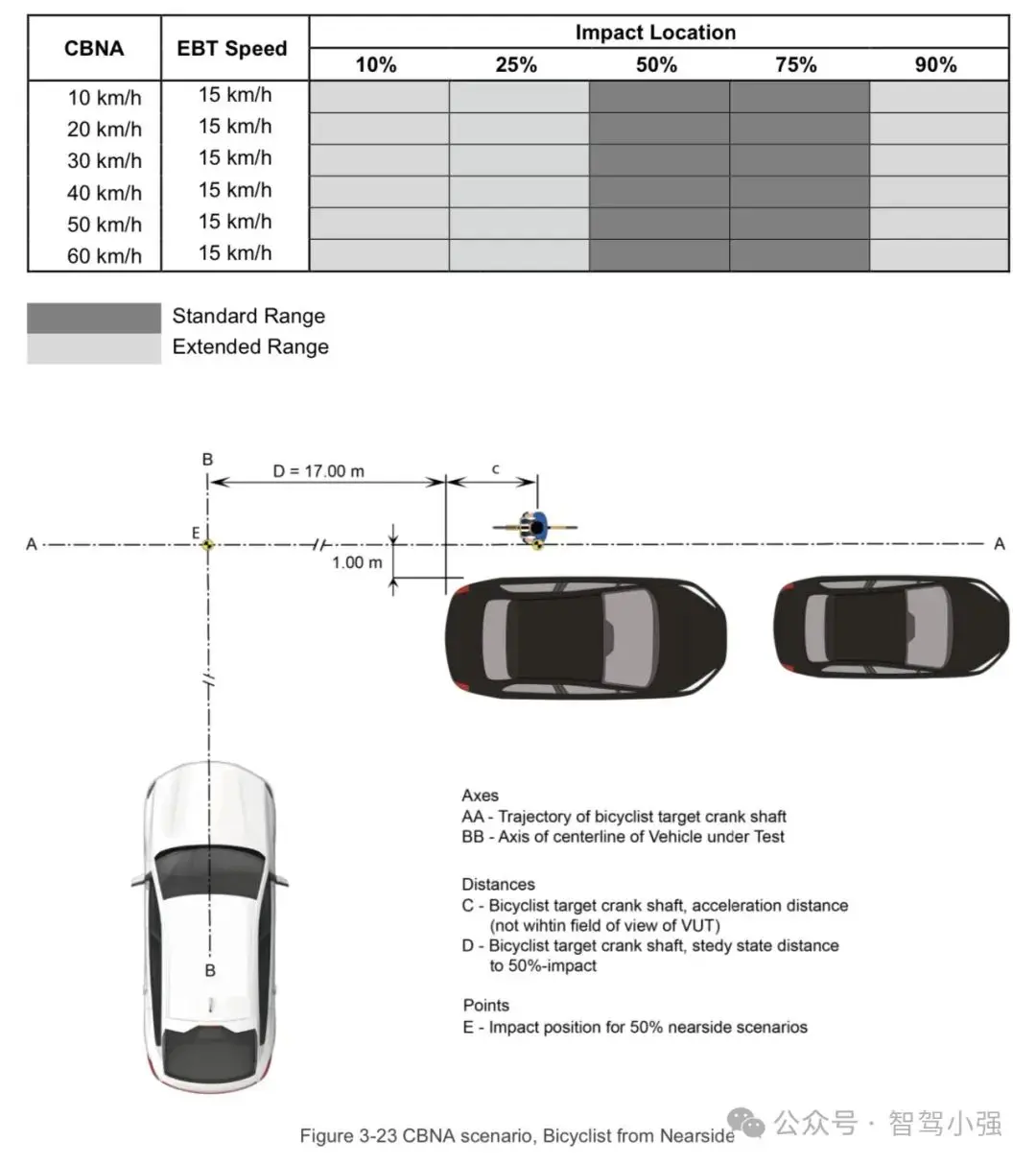
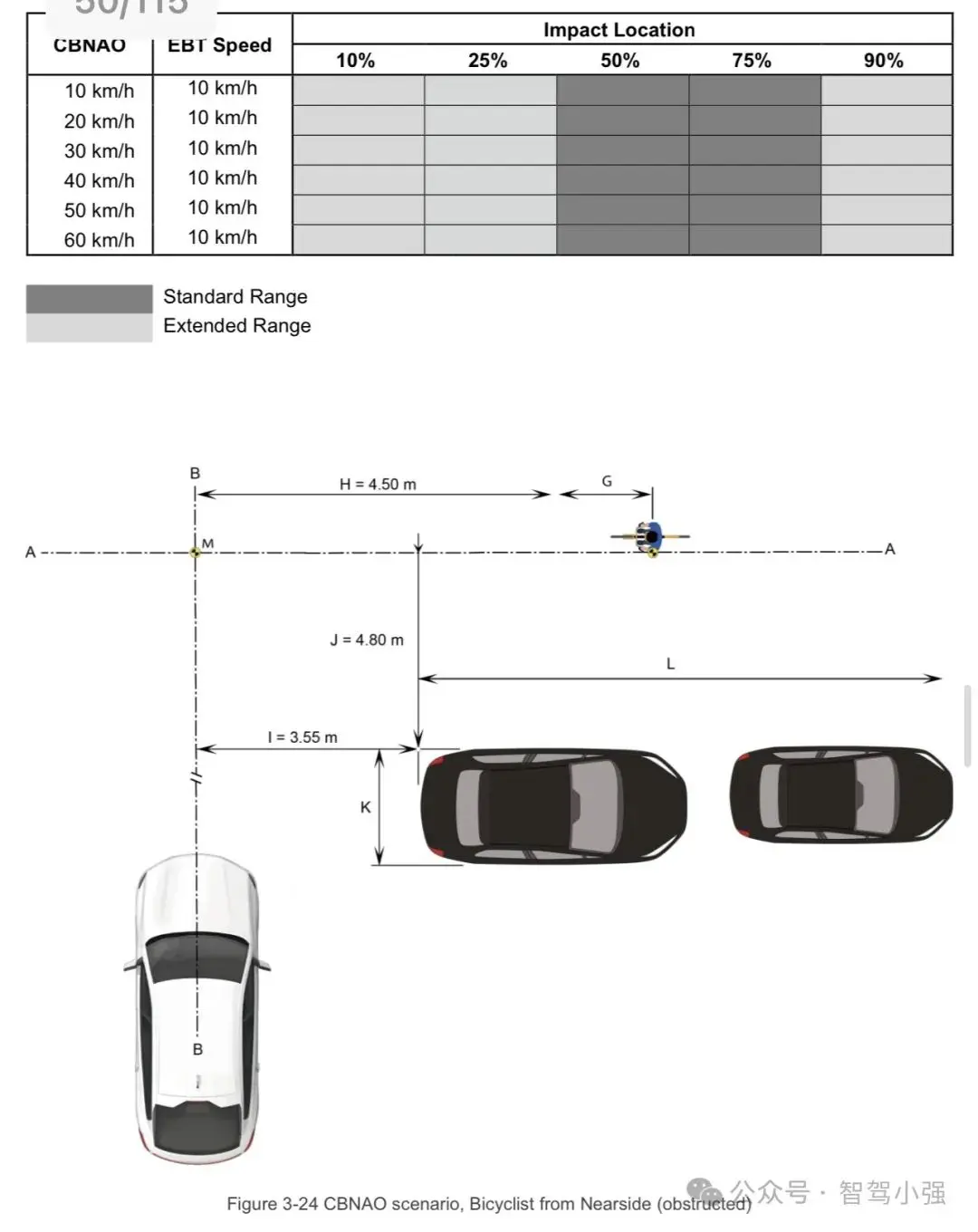
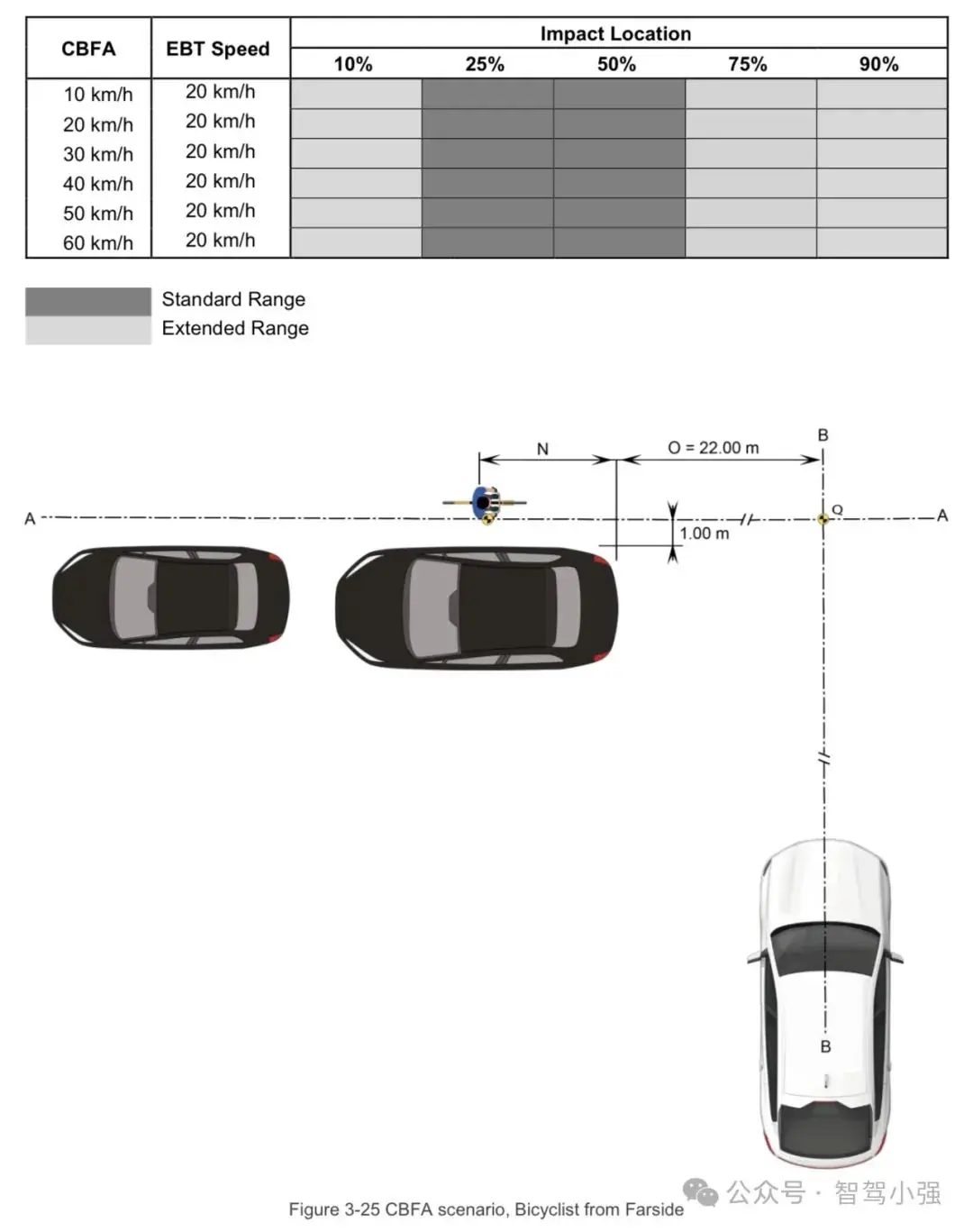
3.2.3.2 Car-to-Bicyclist Crossing
| 行人和自行车 | 最大得分 | |||
| 标准场景 | 扩展场景 | 鲁棒性 | 共计 | |
| 车对自行车横穿 | 4 | 0.5 | 0.5 | 5 |
| CBNA | 1 | 0.125 | 0.125 | 1.25 |
| CBFA | 1 | 0.125 | 0.125 | 1.25 |
| CBNCO | 2 | 0.25 | 0.25 | 2.5 |







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
