




 广告
广告





















































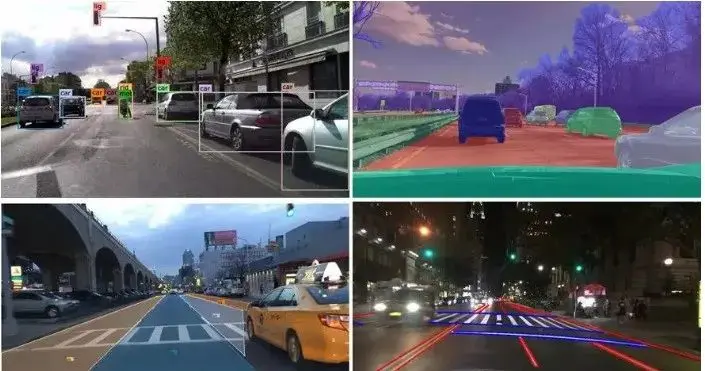
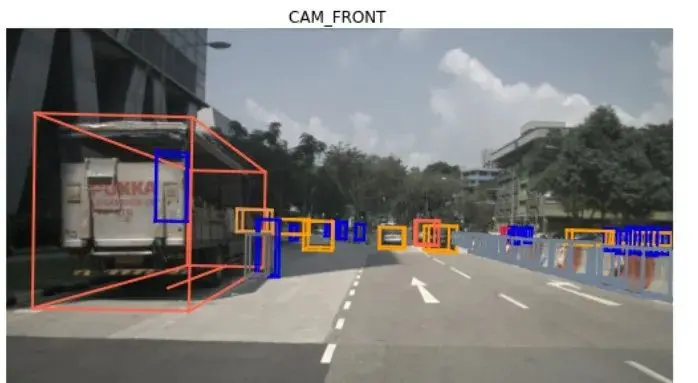
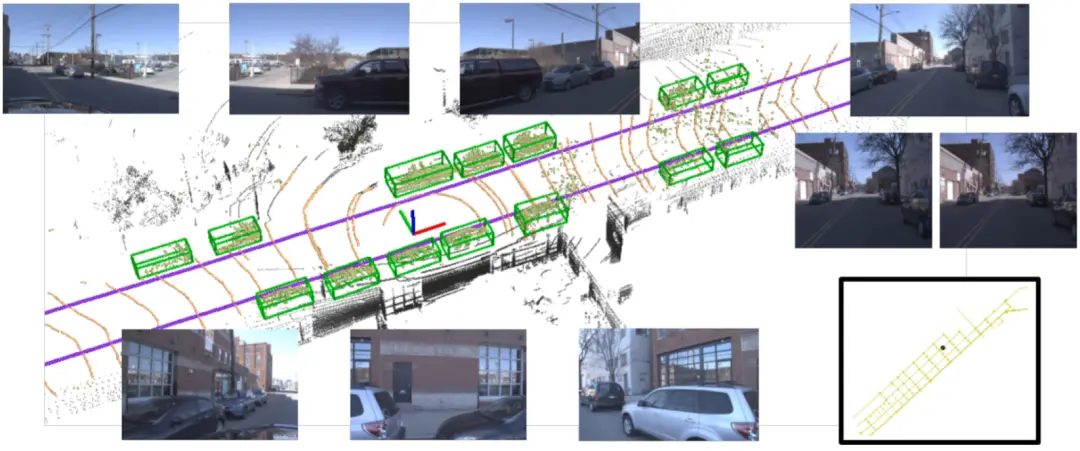
端到端自动驾驶算法相关的开源数据集
2024-12-30 10:39:11· 来源:汽车未来科技Lab

以下是一些与端到端自动驾驶算法相关的开源数据集:

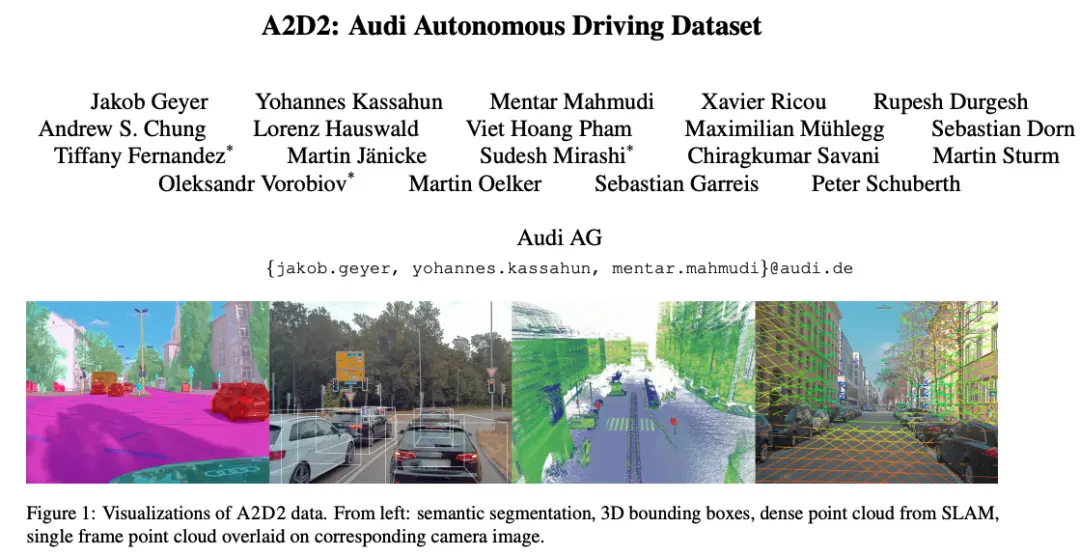
此外,还有ApolloScape、SODA10M、Talk2Car、Lyft Level 5、BLVD、DBNet、JAAD和Comma.ai视频数据集等,这些数据集涵盖了不同的自动驾驶场景和任务,可用于训练和评估端到端自动驾驶算法的性能。



编辑推荐




最新资讯
-
线控制动之机电制动(EMB)系统的综述:结
2025-04-13 09:30
-
「零重力」全球首个!中汽协会发布《汽车大
2025-04-12 21:00
-
自适应模糊控制尾翼设计及其制动性能研究
2025-04-12 20:57
-
振动试验及其设备中级篇 电动型振动试验系
2025-04-12 20:48
-
不会加塞的NOA不是好NOA?
2025-04-12 20:48
