




 广告
广告





















































ENCAP2026对低速碰撞避免的要求(中)

1.背景、定义&测试设备
2.测试条件
3.测试程序
4.测试执行
5.评估标准和评分
6.加速踏板应用程序
3.测试程序
正式认证时,所有的测试场景都是基于主机厂提交的得分预测GRID随机选择的,测试场景分布与预测得分分布保持一致(红点除外)。
3.1 车辆和摩托车场景
车辆和PTW(摩托车)的测试场景如下所示:
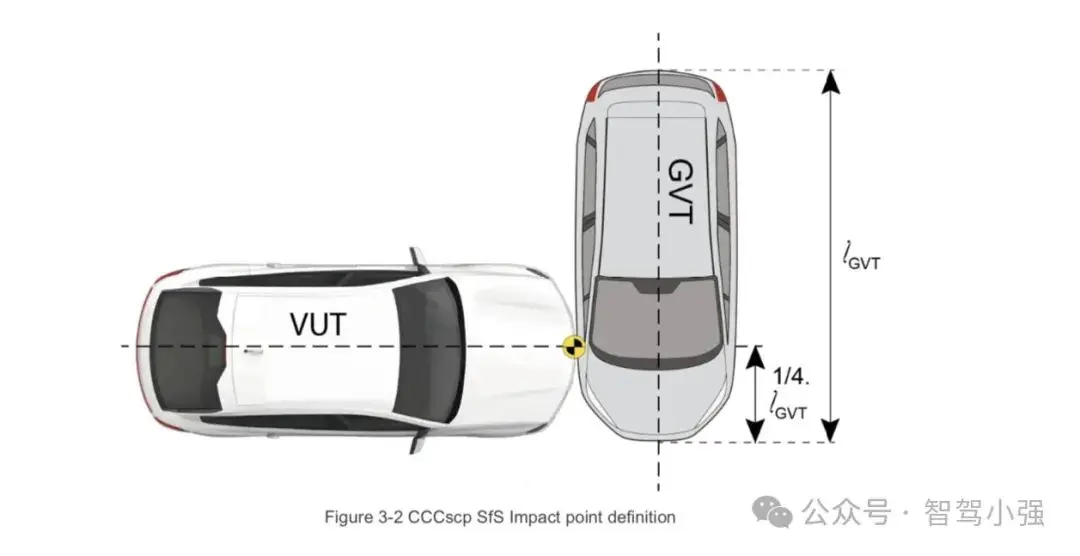
3.1.1 车对车横穿(3分)

VUT最初处于静止状态,与GVT目标撞击点一侧的初始纵向距离在2.5~2.9m之间,距离随机选择。假设一条直线路径相当于所在车道的中心线,接近并继续直行穿过一个路口。 对于GVT,假设一条直线路径相当于所在车道的中心线,垂直于VUT的中心线,从远侧方向穿过交界处,场景设置如下图所示。
踩下刹车踏板,确保VUT是静止的,直到达到T0状态,然后按照第6章中所述方法进行加速踏板应用。
在加速阶段,GVT应以>1m/s²的加速度加速到选定的速度。随后是0.5s的稳定阶段,之后应满足稳态条件。 GVT和VUT的路径将被同步,以便VUT的前部在50%±25%的冲击位置与GVT的参考点碰撞(假设没有系统反应)。
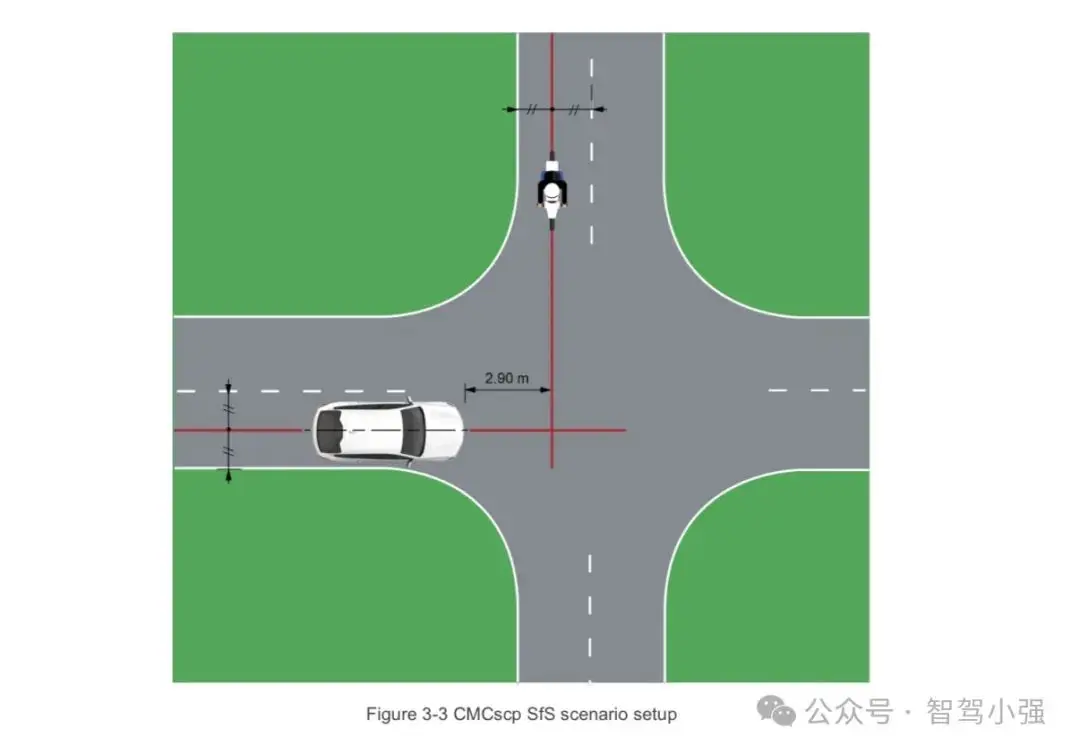
3.1.2 车对摩托车横穿(3分)

VUT最初处于静止状态,与EMT目标撞击点的初始纵向距离在2.5~2.9m之间。假设一条直线路径相当于所在车道的中心线,接近并继续直行穿过一个路口。 对于EMT,假设一条直线路径相当于所在车道的中心线,垂直于VUT的中心线,从远侧方向穿过交界处,场景设置如下图所示。
踩下刹车踏板,确保VUT是静止的,直到达到T0状态,然后按照第6章中所述方法进行加速踏板应用。
在加速阶段,EMT应以>1m/s²的加速度加速到选定的速度。随后是0.5s的稳定阶段,之后应满足稳态条件。 EMT和VUT的路径将被同步,以便VUT在100%的碰撞位置与EMT的参考点碰撞,并且公差为车辆长度的±10%(假设没有系统反应)。
CMCscp的100%撞击位置如下图所示(目标从远侧接近)。
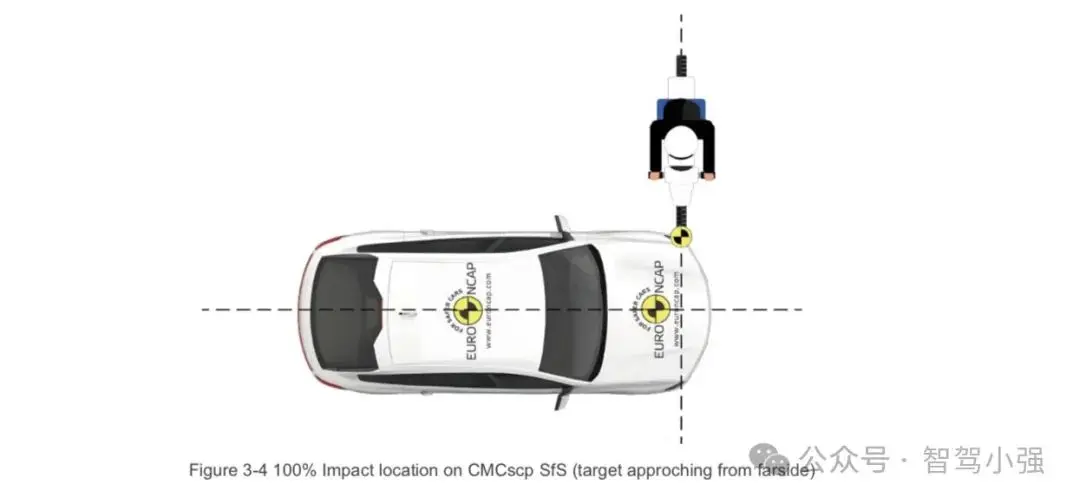
针对左舵车:
VUT最右侧为0%,最左侧为100%;
右侧为近端(靠近路沿),左侧为远端(远离路沿)。
3.1.3 车对车的转弯穿越路径CCFtap(1分)

应定义VUT的初始位置:使其首先遵循10km/h的测试用例路径,然后在VUT的最外侧(100%处)与十字路口(虚拟)中央车道标记的中心重合时停止。
GVT将沿着与VUT初始位置相邻的车道上的直线路径行驶,方向与VUT相反。VUT和GVT的直线路径均距离中心虚线标记的中心1.75m。场景设置如下图所示。
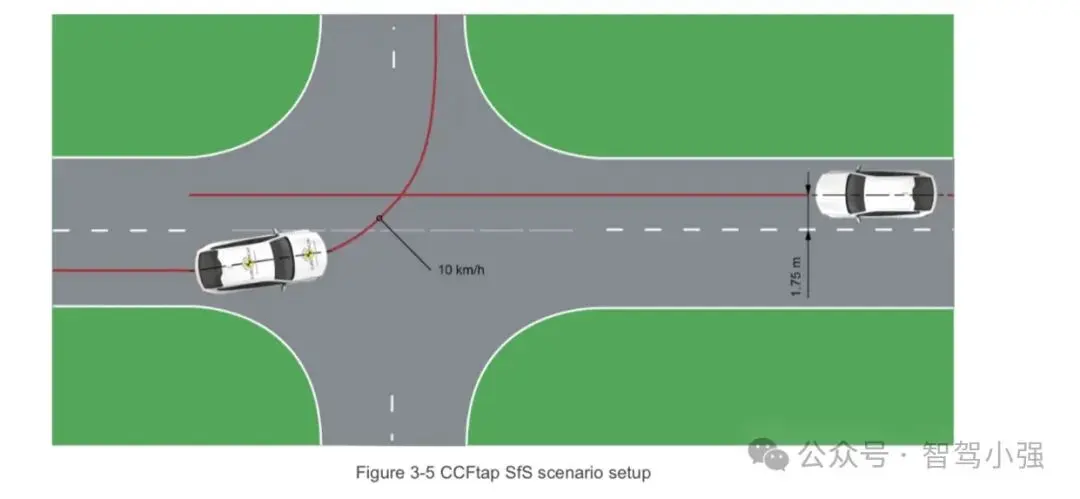
踩下刹车踏板,确保VUT是静止的,直到达到T0状态,然后按照第6章中所述方法进行加速踏板应用。
VUT和GVT的路径将同步,使得VUT在50%±25%的碰撞位置与GVT的参考点重合(假设没有系统反应),如下图所示:
3.1.4 车对摩托车的转弯穿越路径CMFtap(3分)

应定义VUT的初始位置:使其首先遵循10km/h的测试用例路径,然后在VUT的最外侧(100%处)与十字路口(虚拟)中央车道标记的中心重合时停止。 EMT将沿着与VUT初始位置相邻的车道上的直线路径行驶,方向与VUT相反。VUT和EMT的直线路径均距离中心虚线标记的中心1.75m。场景设置如下图所示:
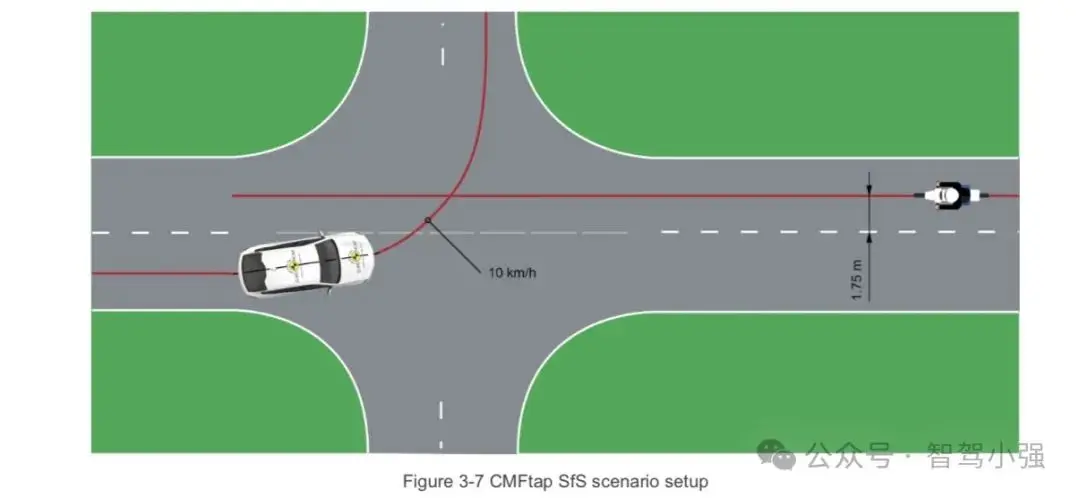
踩下刹车踏板,确保VUT是静止的,直到达到T0状态,然后按照第6章中所述方法进行加速踏板应用。
VUT和EMT的路径将同步,使得VUT在50%±25%的碰撞位置与EMT的参考点重合(假设没有系统反应),如下图所示:

3.2 行人和自行车场景
3.2.1 车对人的机动移动
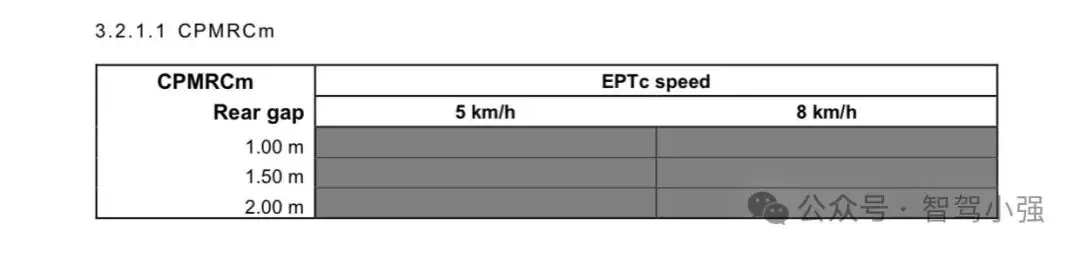
3.2.1.1 后向移动儿童CPMRCm(1.5分)
VUT最初定位在选定的后间隙,该间隙为VUT最后端与儿童假人EPTc参考点的距离。EPTc最初位于距离VUT轨迹中心4.00m的地方。场景设置如下图所示:
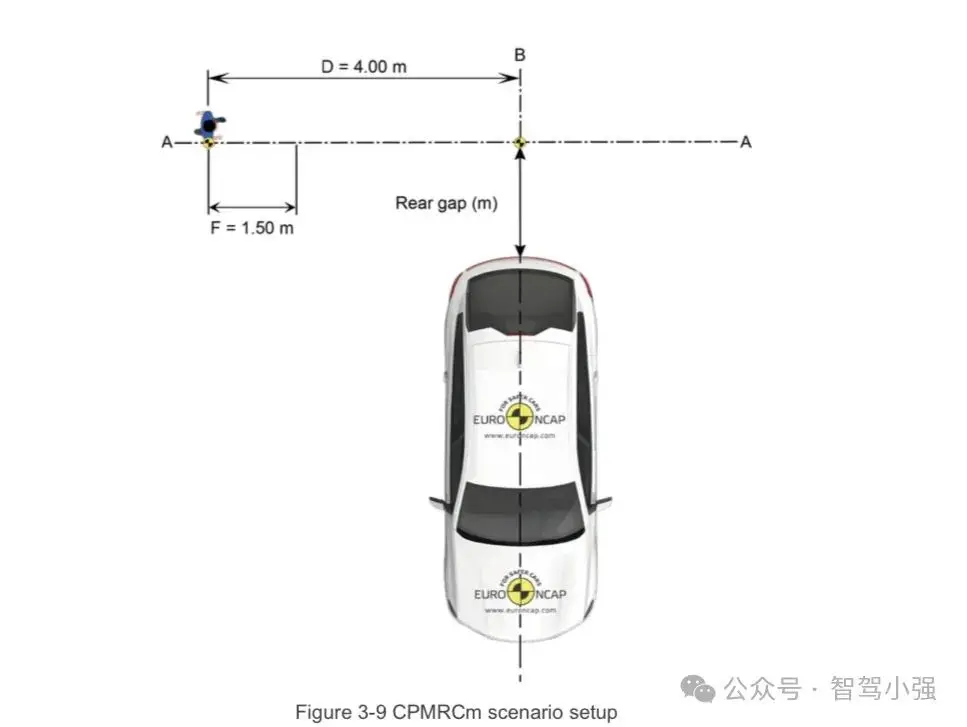
加速距离F = 1.50m。
儿童假人EPTc应在距离初始位置1.50m以内达到选定的速度。然后VUT开始倒车,按照第6章中所述方法进行加速踏板应用,使撞击位置发生在25%、50%和75%的撞击位置。
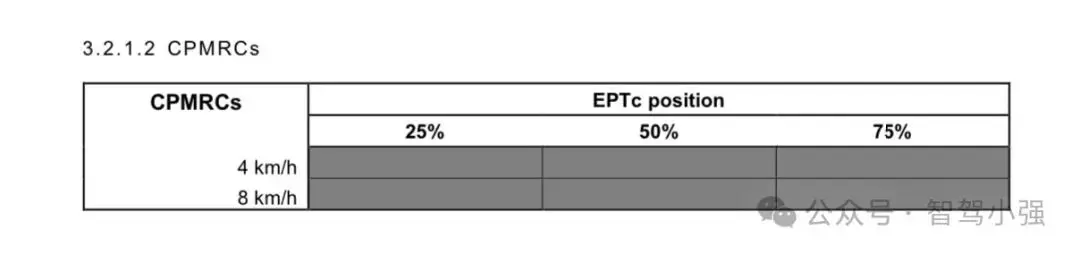
3.2.1.2 后向静止儿童CPMRCs(1.5分)
儿童假人EPTc最初定位在选定的碰撞位置处,面向随机选择的方向,并且与VUT的距离为2s TTC(从Tsteady开始测量)。场景设置如下图所示:

VUT应在距离初始位置的最小距离(A)内加速达到选定的VUT速度。 达到选定的速度后应保持稳定,直到测试结束。
3.2.1.3 前向静止儿童CPMFC(2分)
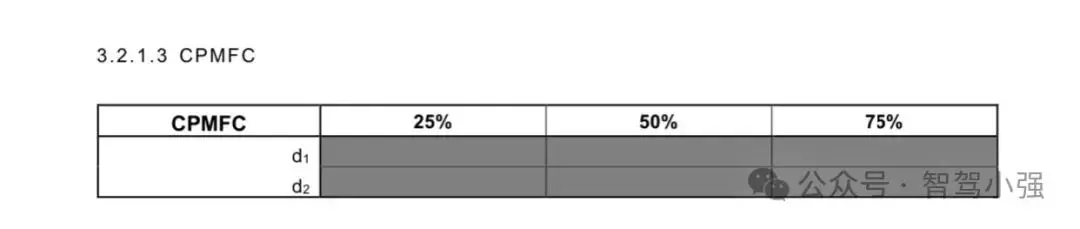
儿童假人EPTc最初定位在选定的碰撞位置,面向随机选择的方向,TACC时刻儿童碰撞报考点距离车辆最前方纵向距离为1.5m。
测试车辆VUT从静止(T0)开始蠕行,行驶一段距离(随机选择d1或d2)后,达到TACC。
d1:蠕行速度稳定行驶,直到TAEB前1s;
d2:蠕行1s。
然后在TACC时刻,进行下述的加速踏板应用:
>全部行程的90%;
>全部行程的70%,且速度≥400%/s。
3.2.2 车对自行车横穿
3.2.2.1 自行车近端遮挡横穿CBNAO(3分)

测试车辆VUT距离完全遮挡的障碍物旁边1m的位置,距离EBT的碰撞参考点的纵向距离在1.5~2.5m之间的任意距离。场景设置如下图所示:
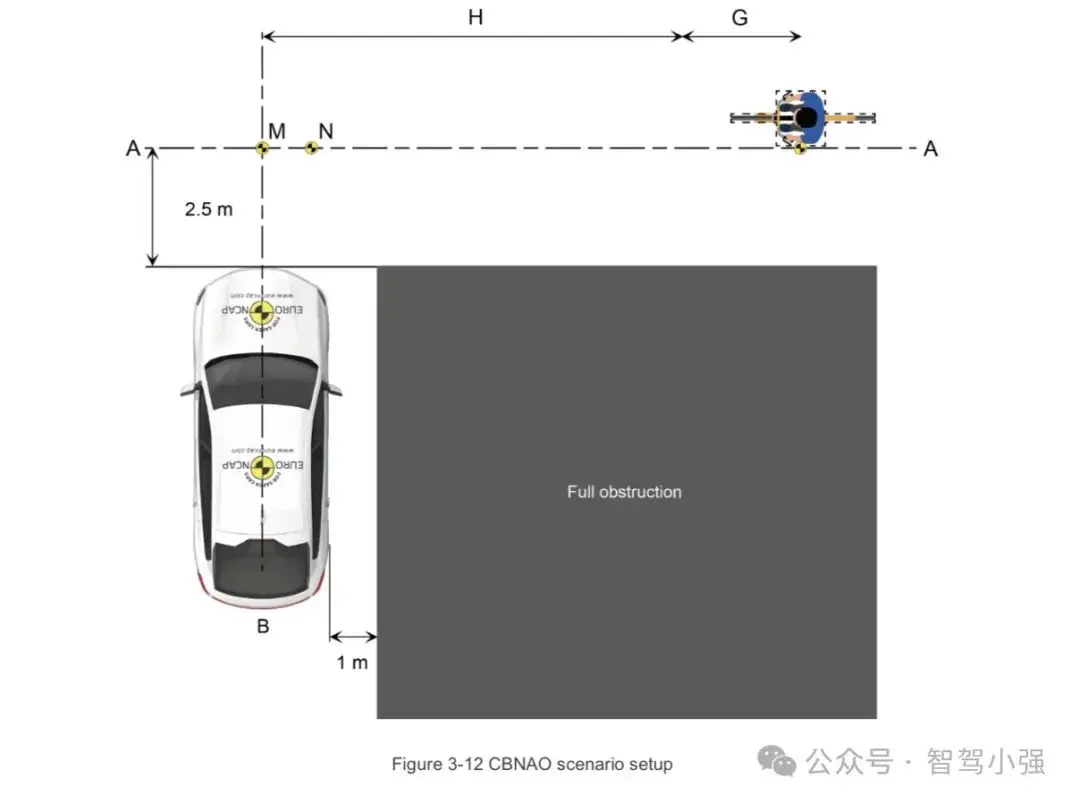 EBT应在加速距离G内达到选定的速度。 踩下刹车踏板,确保VUT是静止的,直到达到T0状态,然后按照第6章中所述方法进行加速踏板应用。 VUT和EBT的路径将同步,使得碰撞位置发生在测试车辆前部结构的25%(N点)和50%(M点)碰撞点。3.2.3 开门预警CBDA(2分)
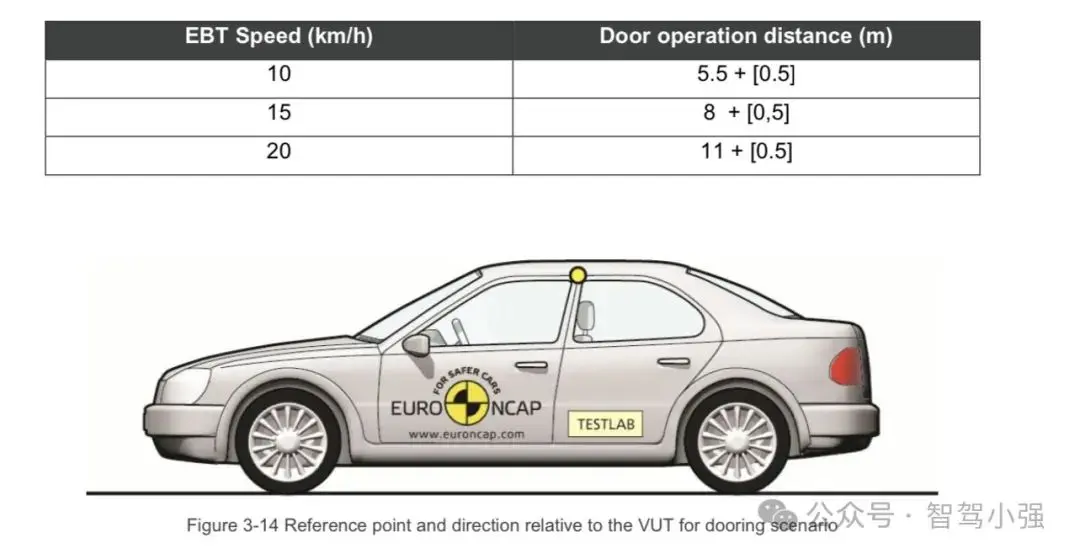
EBT应在加速距离G内达到选定的速度。 踩下刹车踏板,确保VUT是静止的,直到达到T0状态,然后按照第6章中所述方法进行加速踏板应用。 VUT和EBT的路径将同步,使得碰撞位置发生在测试车辆前部结构的25%(N点)和50%(M点)碰撞点。3.2.3 开门预警CBDA(2分)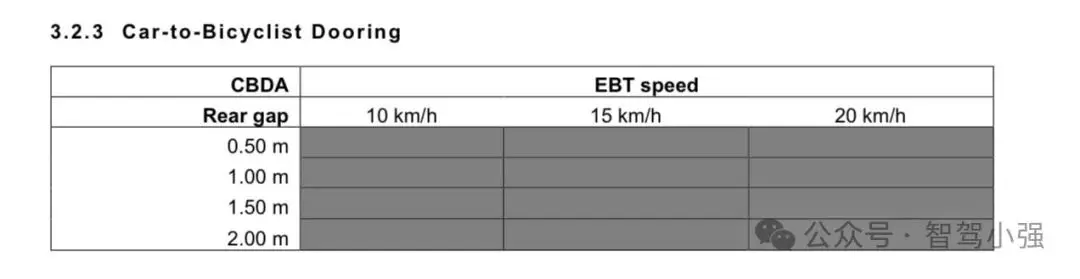 对于CBDA场景,一辆自行车以10、15和20km/h的速度在停放的VUT车辆旁边直线行驶。后间隙(VUT和障碍车之间的距离)从0.5m到2.00m不等。 VUT和障碍车最宽的外部结构(无后视镜)距离VRU路径1m,车辆的中心轴与VUT路径平行。要使用的障碍车辆是附录B中定义的较小的障碍车辆。
对于CBDA场景,一辆自行车以10、15和20km/h的速度在停放的VUT车辆旁边直线行驶。后间隙(VUT和障碍车之间的距离)从0.5m到2.00m不等。 VUT和障碍车最宽的外部结构(无后视镜)距离VRU路径1m,车辆的中心轴与VUT路径平行。要使用的障碍车辆是附录B中定义的较小的障碍车辆。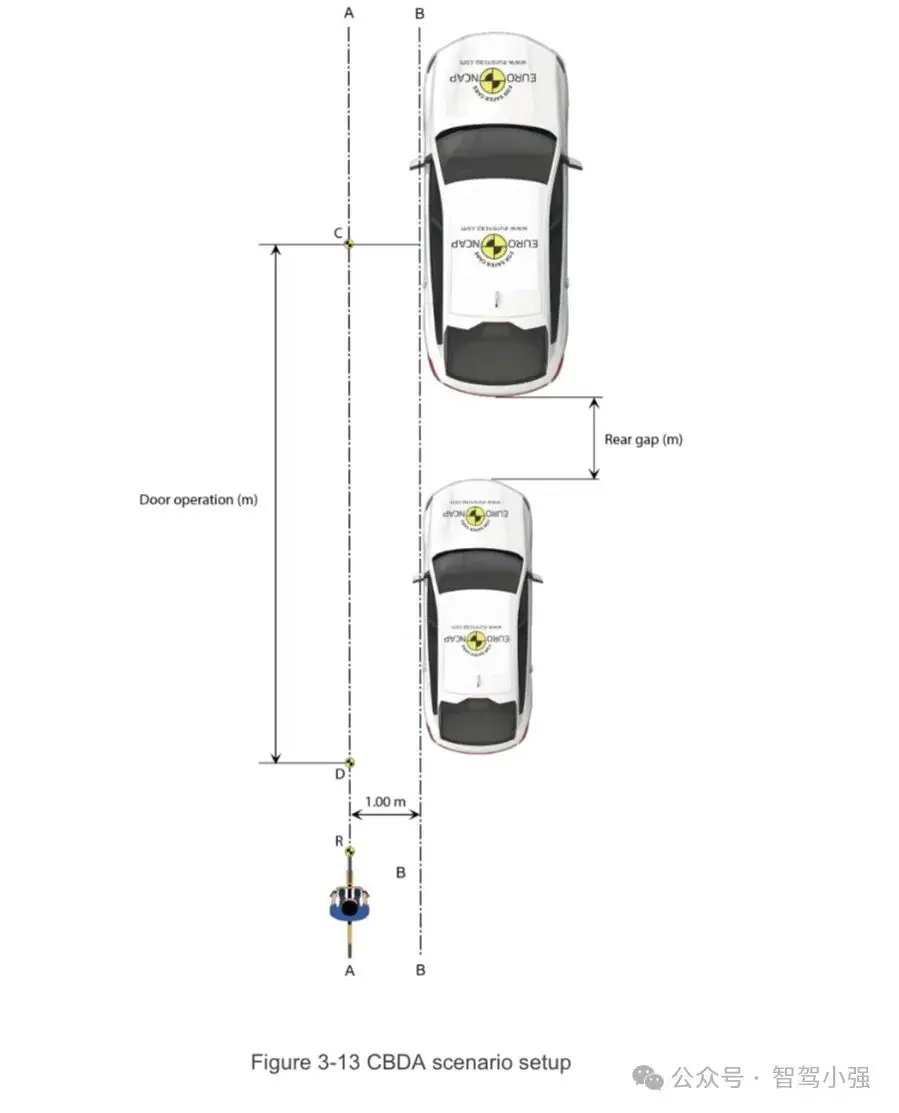 较小的障碍物车辆应属于小型家用车类别,并位于最靠近人行道的位置。较小的障碍物车辆应在以下几何尺寸范围内,并需要呈深色。车长:4.1~4.4m车宽:1.7~1.9m(不含后视镜)车高:1.3~1.5m引擎盖长(到A柱):1.1~1.5m大灯高度:0.65~0.8m
较小的障碍物车辆应属于小型家用车类别,并位于最靠近人行道的位置。较小的障碍物车辆应在以下几何尺寸范围内,并需要呈深色。车长:4.1~4.4m车宽:1.7~1.9m(不含后视镜)车高:1.3~1.5m引擎盖长(到A柱):1.1~1.5m大灯高度:0.65~0.8m
在第一次运行中,EBT在不操作车门打开界面的情况下通过停止的VUT,以评估提供给驾驶员的信息(如适用)。
在第二次运行中(适用于警告系统Topen和车门保持系统Tdoor operation),VUT驾驶员打开车门的操作应与“车门操作距离”关联。
车门操作距离为:从自行车目标EBT前部参考点到驾驶员车门最后方参考点的距离。
 开门(手动操作):
开门(手动操作):
在正常非危险的情况下,拉动车门把手或激活其他开门界面(例如按下按钮),在推开车门的同时,可以离开汽车。当有额外操作(例如第二次拉动)触发时,允许使用紧急退出功能。 对于CBDA场景,所有测试应在车辆停在停车位,下电后180秒内,在驾驶员未系安全带的情况下进行。







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
