




 广告
广告





















































法规标准-C-NCAP评测标准解析(2024版)

车辆直行与前方纵向行走的行人测试场景(CPLA)
CPLA场景下,行人以5km/h的速度以与车辆行驶方向相同的方向移动。VUT分别以20~80km/h 的速度测试,其中20km/h、40km/h测试AEB功能,60km/h、80km/h测试FCW功能,碰撞位置在25%处,对应图O.11、O.12中的“C”点。CPLA测试场景分别进行白天和夜晚测试,在夜晚测试时,无路灯辅助照明,VUT开启近光灯,在对向车道距离碰撞点0m处,OV停放在车道中间,开启近光灯。OV应为普通大批量生产的汽车,轴距应满足2.3m~2.9m的范围要求。

车辆直行与前方远端被遮挡的穿行的行人测试场景(CPFAO)
CPFAO 场景下,行人以6.5km/h的速度以与车辆行驶方向垂直的方向移动。VUT分别以20km/h、40km/h 和 60km/h 的速度测试。碰撞位置在25%处,对应图O.14中的“C”点
车辆直行与前方近端被遮挡的穿行的儿童测试场景(CPNCO)
CPNCO场景下,儿童以5km/h的速度以与车辆行驶方向垂直的方向移动。VUT分别以20km/h、40km/h 和 60km/h 的速度测试。碰撞位置在25%处,对应图O.13中的“C”点。对于障碍车辆OV应为普通大批量生产的汽车,轴距应满足2.3m~2.9m的范围要求
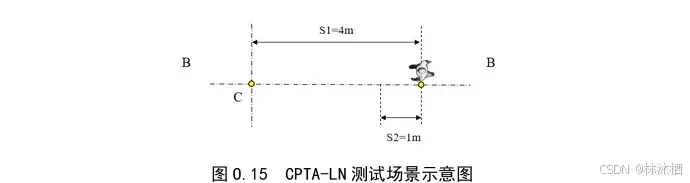
车辆左转与前方近端穿行的行人测试场景(CPTA-LN)
CPTA-LN 场景下,行人以5km/h的速度自相对车辆行驶方向的右侧向左侧移动。VUT分别以10km/h、20km/h、30km/h 的速度左转测试。碰撞位置在50%处,对应图O.15中的“C”点。VUT转向路径的具体参数设置参考附录L中“表L.7CCFT场景VUT转向路径参数表”
车辆左转与前方远端穿行的行人测试场景(CPTA-LF)
CPTA-LF 场景下,行人以6.5km/h的速度自相对车辆行驶方向的左侧向右侧移动。VUT分别以10km/h、20km/h、30km/h 的速度测试。碰撞位置在50%处,对应图O.16中的“C”点。VUT转向路径的具体参数设置参考附录L中“表L.7CCFT场景VUT转向路径参数表”
车辆右转与前方远端穿行的行人测试场景(CPTA-RF)
CPTA-RF 场景下,行人以6.5km/h的速度自相对车辆行驶方向的左侧向右侧移动。VUT分别以10km/h、20km/h的速度测试。碰撞位置在50%处,对应图O.17中的“C”点



 广告
广告




最新资讯
-
【线下研讨会邀请】NG-eCall车载事故紧急呼
2025-03-10 12:12
-
越野车的性能——可变形路面上的车辆动力学
2025-03-10 12:12
-
韩国修订新车准入标准,2025.5.30开始执行
2025-03-10 09:00
-
浅谈电动汽车续航里程测试方法(EPA/WLTP/NE
2025-03-08 09:30
-
电动汽车驱动电机及控制系统——《开关磁阻
2025-03-08 09:24
