




 广告
广告





















































法规标准-C-NCAP评测标准解析(2024版)

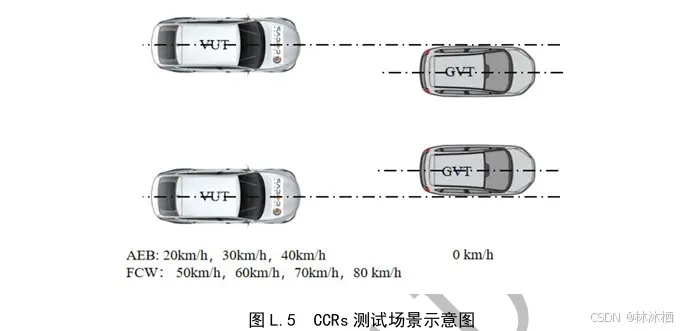
车辆直行与前方静止目标车辆测试场景(CCRs)
CCRs 测试场景下,GVT在VUT行驶路径上,VUT按照规划路径行驶,如图L.5所示。VUT分别以20km/h、30km/h和40km/h的速度测试AEB功能,以50km/h、60km/h、70km/h和80km/h的速度测试FCW功能
车辆高速直行与前方静止目标车辆测试场景(CCRH)
CCRH测试场景下,GVT可具备C-V2X网联通信能力,且具备第三方电子认证服务机
构认可的互信能力,GVT、VT和VUT在同一车道,VUT与VT以相同的速度保持固定的相对距离沿车道中间匀速行驶,在距离为A时,达到稳定车速,测试车速分别为80km/h、120km/h,对应两者之间的距离A分别为50m、100m,如图L.6所示。当VT和GVT车头的距离B分别达到49m、73m时VT由左侧或右侧切出至相邻车道,VT车头位置与GVT车头位置平行,切出过程持续时间为2.2s

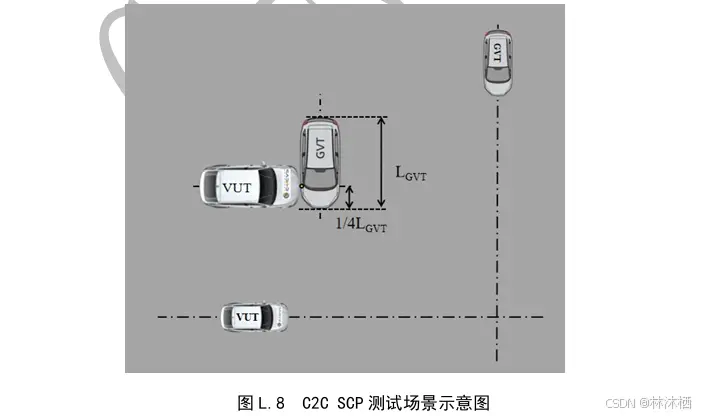
车辆直行与前方横穿目标车辆测试场景(C2CSCP)
C2CSCP测试场景下,VUT和GVT分别按照各自路径行驶,两车路径相互垂直。VUT
分别以30km/h和40km/h的速度测试AEB功能,以50km/h和60km/h的速度测试FCW功能,GVT分别以20km/h、30km/h、40km/h和50km/h的速度进行测试。如图L.8所示

车辆直行与前方被遮挡的横穿目标车辆测试场景(C2CSCPO)
C2CSCPO测试场景下,VT1、VT2、VT3为3辆静止车辆,是普通大批量生产的汽车,轴距应满足2.3m~2.9m的范围。GVT可具备C-V2X网联通信能力,且具备第三方电子认证服务机构认可的互信能力,VT1、VT2、VT3不做要求。VUT以所在车道的中心线为轨迹行驶,GVT沿垂直于VUT方向移动且以车道中心线为行驶轨迹,VUT分别以50km/h和60km/h的匀速行驶开展测试,GVT分别以40km/h和50km/h的速度进行测试。如图L.9所示
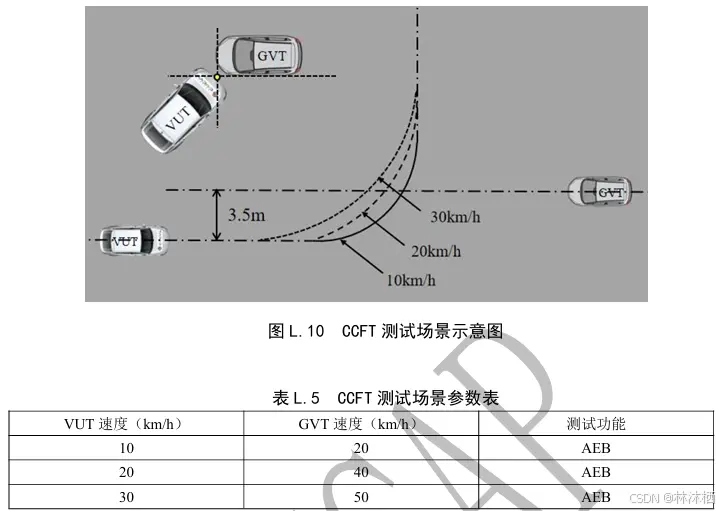
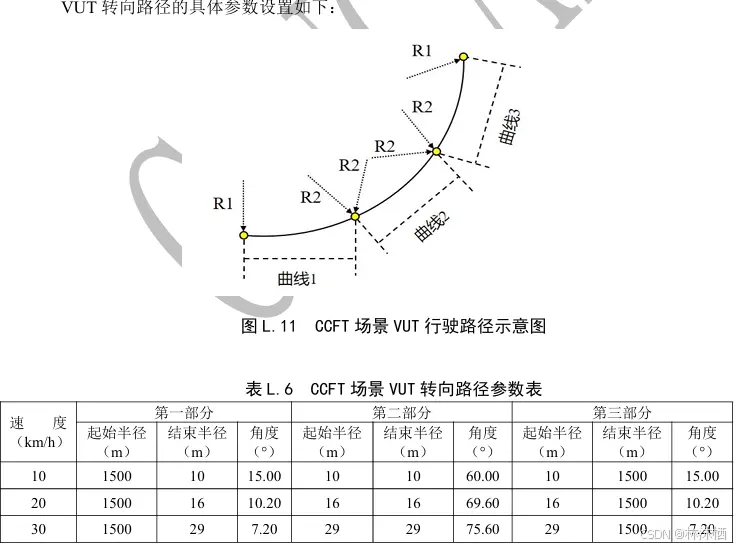
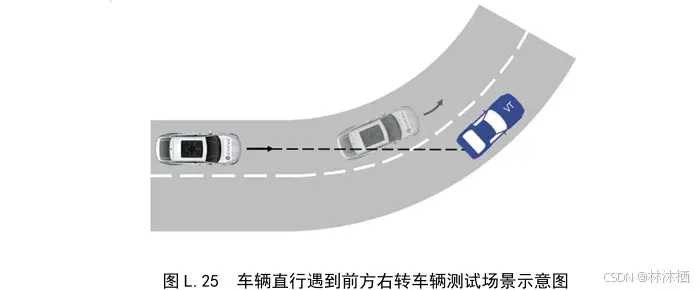
车辆左转与对向目标车辆测试场景(CCFT)
CCFT测试场景下,VUT和GVT分别按照各自路径行驶,其中VUT为左转,GVT对向直行。碰撞位置为GVT地面矩形投影左前角与VUT最前端中点的重合点。VUT转向时需开启左侧转向灯,转向灯开启时刻不晚于转向开始时刻前2s。如图L.10所示。VUT分别以10km/h、20km/h和30km/h的速度测试AEB功能。对于VUT各个速度点的测试,GVT分别以20km/h、40km/h和50km/h的速度进行测试
AEB C2C——评分标准(怎么打分?)

AEB False Reaction——评测内容(测什么?)



 广告
广告




最新资讯
-
NOFFZ 发布全新板级测试治具以及测试设备的
2025-03-10 15:47
-
精准测量,绝缘护航 ——陶瓷基板绝缘电阻
2025-03-10 12:13
-
【线下研讨会邀请】NG-eCall车载事故紧急呼
2025-03-10 12:12
-
越野车的性能——可变形路面上的车辆动力学
2025-03-10 12:12
-
韩国修订新车准入标准,2025.5.30开始执行
2025-03-10 09:00
